Physics For Scientists And Engineers 6E - part 59
SECTION 8.4 • Changes in Mechanical Energy for Nonconservative Forces
233
!
E
mech
" #
f
k
d, where d is the horizontal distance trav-
eled by the skier.
To find the distance the skier travels before coming to
rest, we take K
C
"
0. With v
B
"
19.8 m/s and the friction
force given by f
k
"
)
k
n " )
k
mg, we obtain
!
E
mech
"
E
C
#
E
B
" #
)
k
mgd
95.2 m
d "
v
B
2
2)
k
g
"
(19.8 m/s)
2
2(0.210)(9.80 m/s
2
)
"
" #
)
k
mgd
(K
C
%
U
C
) # (K
B
%
U
B
) " (0 % 0) # (
1
2
mv
2
B
%
0)
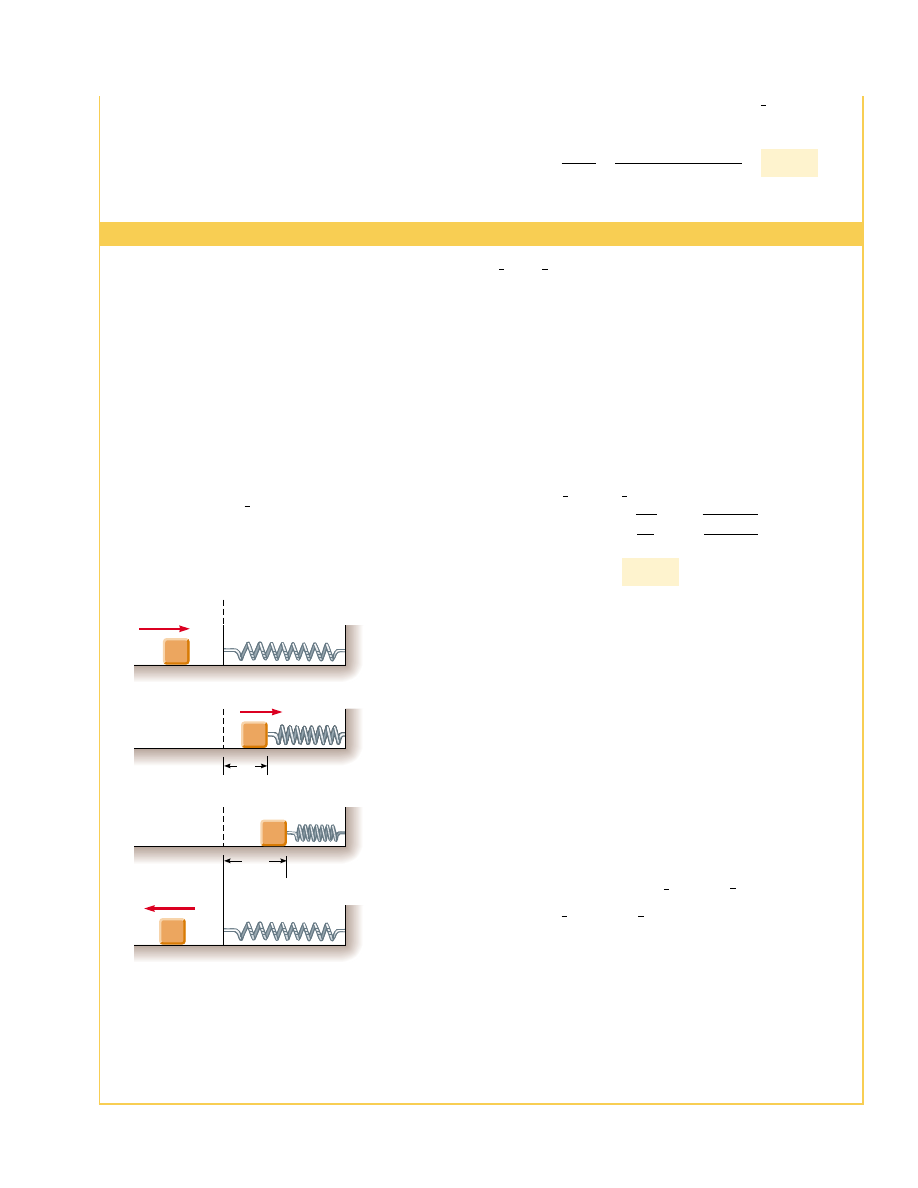
Example 8.9 Block–Spring Collision
A block having a mass of 0.80 kg is given an initial velocity
v
A
"
1.2 m/s to the right and collides with a spring of negli-
gible mass and force constant k " 50 N/m, as shown in
Figure 8.14.
(A)
Assuming the surface to be frictionless, calculate the
maximum compression of the spring after the collision.
Solution Our system in this example consists of the block
and spring. All motion takes place in a horizontal plane,
so we do not need to consider changes in gravitational po-
tential energy. Before the collision, when the block is at
!
, it has kinetic energy and the spring is uncompressed,
so the elastic potential energy stored in the spring is zero.
Thus, the total mechanical energy of the system before
the collision is just
. After the collision, when the
block is at #, the spring is fully compressed; now the
block is at rest and so has zero kinetic energy, while the
energy stored in the spring has its maximum value
1
2
mv
A
2
, where the origin of coordinates x " 0 is
chosen to be the equilibrium position of the spring and
x
max
is the maximum compression of the spring, which in
this case happens to be x
C
. The total mechanical energy of
the system is conserved because no nonconservative forces
act on objects within the system.
Because the mechanical energy of the system is con-
served, the kinetic energy of the block before the collision
equals the maximum potential energy stored in the fully
compressed spring:
"
(B)
Suppose a constant force of kinetic friction acts be-
tween the block and the surface, with )
k
"
0.50. If the
speed of the block at the moment it collides with the spring
is v
A
"
1.2 m/s, what is the maximum compression x
C
in
the spring?
Solution In this case, the mechanical energy of the system
is not conserved because a friction force acts on the block.
The magnitude of the friction force is
Therefore, the change in the mechanical energy of the system
due to friction as the block is displaced from the equilibrium
position of the spring (where we have set our origin) to x
C
is
Substituting this into Equation 8.14 gives
Solving the quadratic equation for x
C
gives x
C
"
0.092 m
and x
C
" #
0.25 m. The physically meaningful root is
x
C
"
0.092 m. The negative root does not apply to this sit-
uation because the block must be to the right of the origin
(positive value of x) when it comes to rest. Note that the
value of 0.092 m is less than the distance obtained in the
frictionless case of part (A). This result is what we expect
because friction retards the motion of the system.
25x
2
C
%
3.92x
C
#
0.576 " 0
1
2
(50)x
2
C
#
1
2
(0.80)(1.2)
2
" #
3.92x
C
!
E
mech
"
E
f
#
E
i
"
(0 %
1
2
kx
2
C
) # (
1
2
mv
2
A
%
0) " #
f
k
x
C
!
E
mech
" #
f
k
x
C
"
(#
3.92x
C
)
f
k
"
)
k
n " )
k
mg " 0.50(0.80 kg)(9.80 m/s
2
) " 3.92 N
0.15 m
x
max
"
√
m
k
v
A
"
√
0.80 kg
50 N/m
(1.2 m/s)
0 %
1
2
kx
2
max
"
1
2
mv
2
A
%
0
K
C
%
U
s
C
"
K
A
%
U
s
A
E
C
"
E
A
1
2
kx
2
"
1
2
kx
2
max
E = – mv
A
2
1
2
x = 0
(a)
(b)
(c)
v
C
= 0
(d)
x
max
!
"
#
$
E = – mv
B
2
+ – kx
B
2
1
2
1
2
E = – mv
D
2
= – mv
A
2
1
2
1
2
E = – kx
max
1
2
v
A
v
B
x
B
v
D
= –v
A
2
Figure 8.14 (Example 8.9) A block sliding on a smooth, hori-
zontal surface collides with a light spring. (a) Initially the me-
chanical energy is all kinetic energy. (b) The mechanical energy
is the sum of the kinetic energy of the block and the elastic po-
tential energy in the spring. (c) The energy is entirely potential
energy. (d) The energy is transformed back to the kinetic en-
ergy of the block. The total energy of the system remains con-
stant throughout the motion.