содержание .. 13 14 15 16 ..
Audi Allroad (Quattro). Руководство - часть 15
57
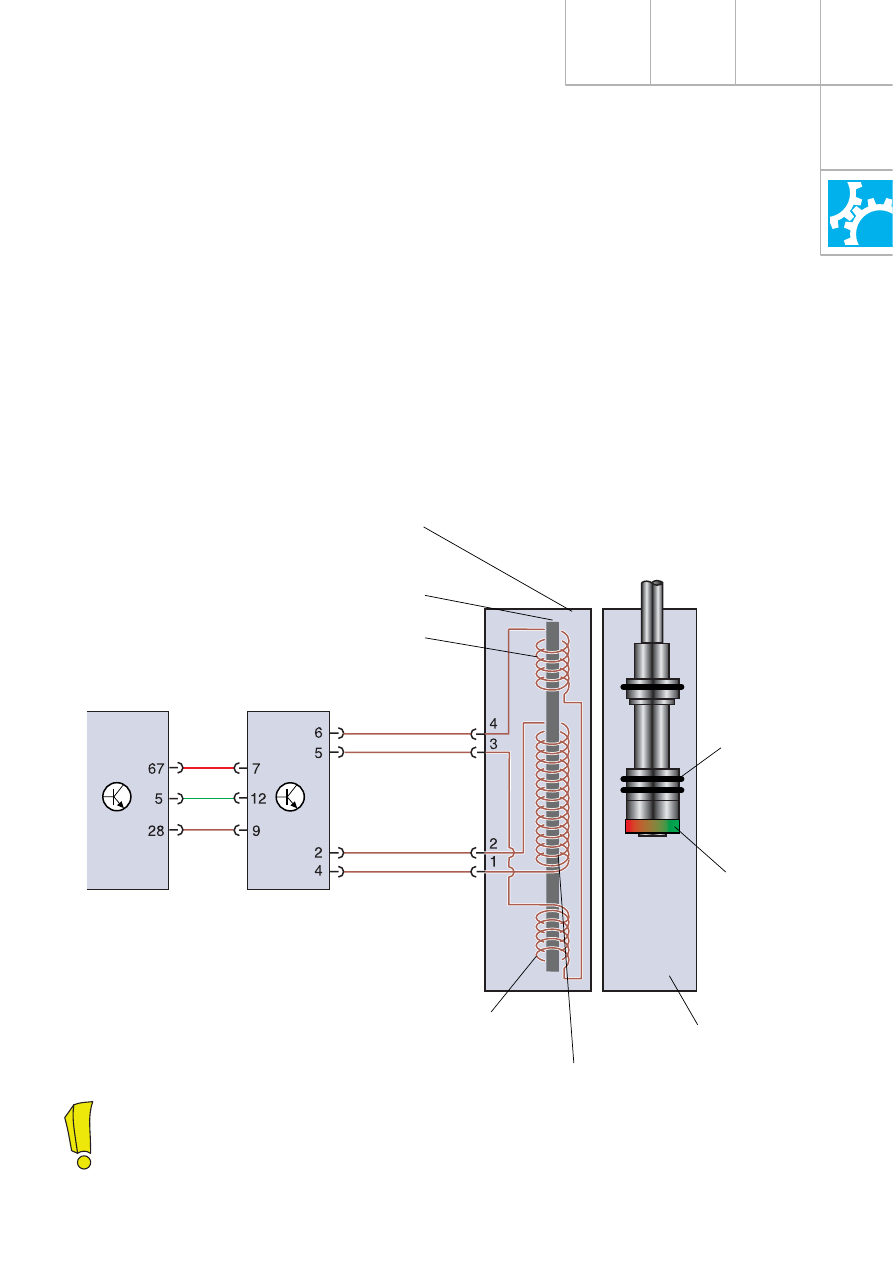
Датчик хода G302 включает в себя
постоянный магнит, установленный на
поршне рабочего цилиндра. Постоянный
магнит вызывает местное магнитное
насыщение магнитопровода и обуславливает
индукцию во вторичных обмотках.
Система обмоток позволяет определить
положение области магнитного насыщения
и, следовательно, положение поршня
(положение муфты включения).
Конструкция датчика хода
Конструкция датчика хода включает в себя
наборный магнитопровод, вдоль которого
в средней части навита первичная обмотка.
На обоих концах магнитопровода
расположены более короткие вторичные
обмотки. Вторичные обмотки соединены
друг с другом последовательно, это
приводит к инвертированию их фаз.
Индуцируемые в них переменные
напряжения соответственно также
изменяются в противофазе.
241_095
Вторичная обмотка S2
Первичная обмотка
Наборный магнитопровод
Постоянный
магнит
Поршень
Блок управления
датчика хода
исполнитель"
ного
гидропривода
J556
Исполнительный
гидропривод
Вторичная обмотка S1
Блок управления
демультиплика"
тора J554
S2
S1
P2
P1
Сборка и юстировка исполнительного гидропривода с датчиком хода и вилкой
включения производится в условиях производства. Датчик хода и исполнительный
гидропривод представляют собой единый узел и заменяются только в сборе.
Более подробно об этом см. на стр. 46 в главе «Исполнительный гидропривод».
Датчик хода исполнительного
гидропривода G302