Nissan Pathfinder. Manual - part 143
AV
SYSTEM
AV-399
< SYSTEM DESCRIPTION >
[PREMIUM AUDIO WITH NAVIGATION]
C
D
E
F
G
H
I
J
K
L
M
B
A
O
P
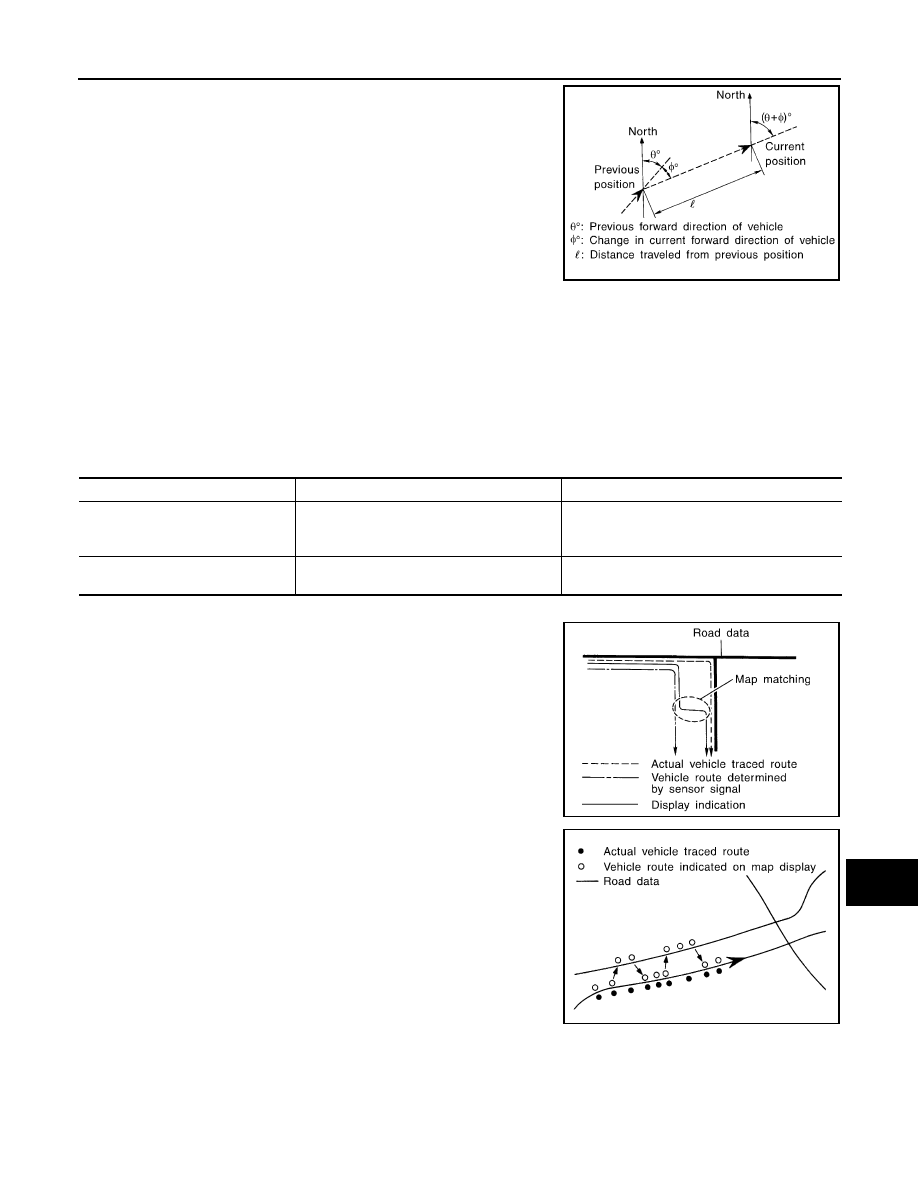
By comparing the vehicle position detection results found by the
GPS and by map-matching, more accurate vehicle position data can
be used.
The current vehicle position will be calculated by detecting the dis-
tance the vehicle moved from the previous calculation point and its
direction.
Travel Distance
Travel distance calculations are based on the vehicle speed input signal. Therefore, the calculation may
become incorrect as the tires wear down. To prevent this, an automatic distance fine adjustment function has
been adopted.
Travel Direction
Change in the travel direction of the vehicle is calculated by a gyroscope (angular velocity sensor) and a GPS
antenna (GPS information). As the gyroscope and GPS antenna have both merit and demerit, input signals
from them are prioritized in each situation. However, this order of priority may change in accordance with more
detailed travel conditions so that the travel direction is detected more accurately.
Map–Matching
Map–matching is a function that repositions the vehicle on the road
map when a new location is judged to be the most accurate. This is
done by comparing the current vehicle position, calculated by the
method described in the position detection principle, with the road
map data around the vehicle, read from the map data stored on the
HDD.
Therefore, the vehicle position may not be corrected after the vehicle
is driven over a certain distance or time in which GPS information is
hard to receive. In this case, the current-location mark on the display
must be corrected manually.
CAUTION:
The road map data is based on data stored on the HDD.
• In map-matching, alternative routes to reach the destination will be
shown and prioritized, after the road on which the vehicle is cur-
rently driven has been judged and the current-location mark has
been repositioned.
If there is an error in distance and/or direction, the alternative
routes will be shown in different order of priority, and the wrong
road can be avoided.
If two roads are running in parallel, they are of the same priority.
Therefore, the current-location mark may appear on either of them
alternately, depending on maneuvering of the steering wheel and
configuration of the road.
SEL684V
Type
Advantage
Disadvantage
Gyroscope (angular velocity sensor)
• Can detect the vehicle's turning angle quite
accurately.
• Direction errors may accumulate when the ve-
hicle is driven for long distances without stop-
ping.
GPS antenna (GPS information)
• Can detect the vehicle's travel direction
(North/South/East/West).
• Correct direction cannot be detected when the
vehicle speed is low.
SEL685V
SEL686V