Mercedes-Benz Sprinter / Dodge Sprinter. Manual - part 76
11.0
CHARTS AND GRAPHS
11.1
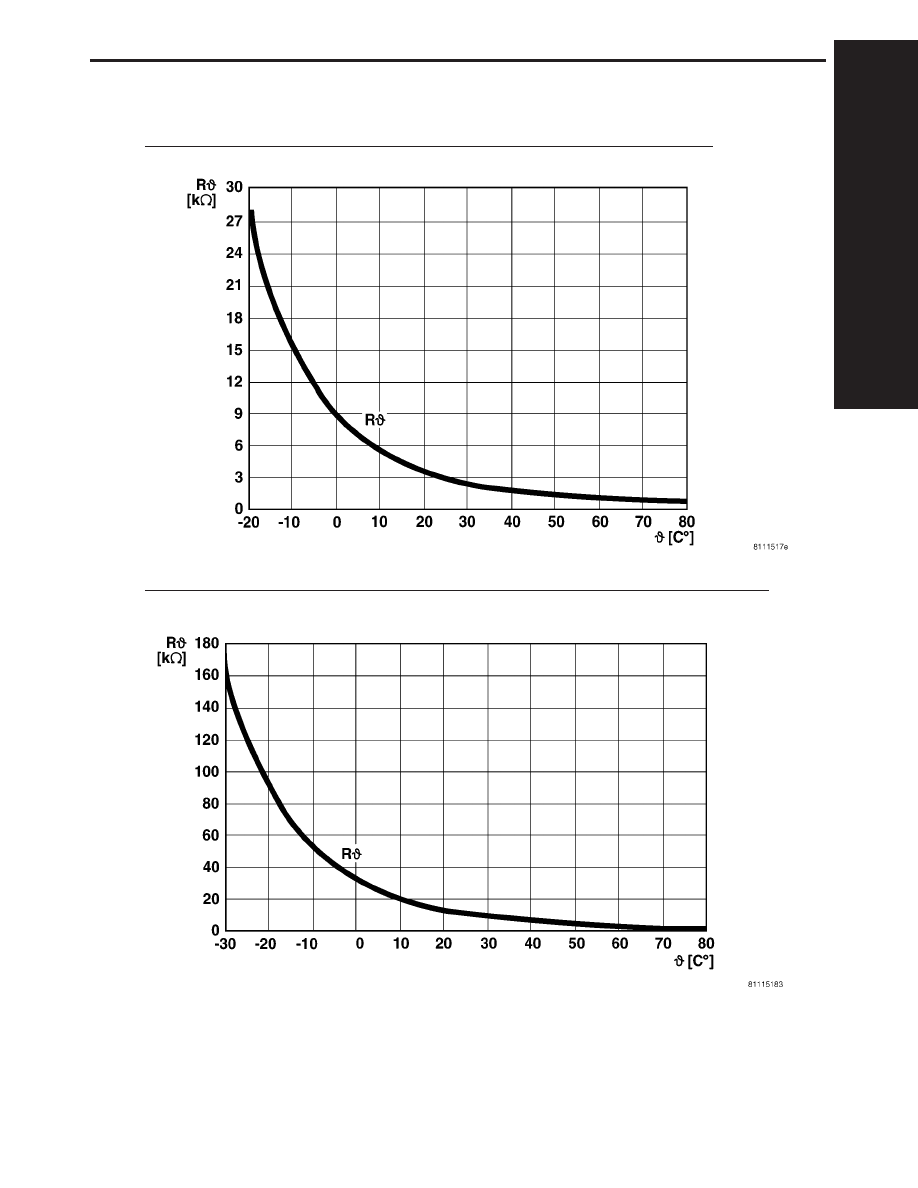
EVAP TEMP SENSOR RESISTANCE TO TEMPERATURE SPECIFICATIONS
11.2
AIR OUTLET TEMP SENSOR RESISTANCE TO TEMPERATURE SPECIFICATIONS
C
H
A
R
T
S
A
N
D
G
R
A
P
H
S
301
CHARTS AND GRAPHS