содержание .. 2 3 4 5 ..
ОНК-140. ОГРАНИЧИТЕЛЬ НАГРУЗКИ КРАНА (ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ). Руководство - часть 4
Лист
ЛГФИ.408844.009 РС
7
4 Ремонт
В разделе 4 приведены сведения о методах и правилах типового ремонта ограничи-
теля, его составных частей и сборочных единиц последних.
4.1 Ремонт ограничителя грузоподъемности
4.1.1 Программно-аппаратные средства ограничителя позволяют проверить ис-
правность основных его узлов и локализировать неисправность путем выдачи на индикатор
ее кода.
При неработоспособности ограничителя поиск его неисправности рекомендуется
проводить в следующей последовательности:
-
проверить БОД и датчики на отсутствие внешних механических повреждений;
-
проверить исправность механизмов привязки датчиков;
-
проверить кабельную разводку, исправность электрических цепей датчиков и БО-
Да.
4.1.2 Неисправности ограничителя, которые могут быть диагностированы и устра-
нены непосредственно на кране, приведены в разделе 3 руководства по эксплуатации огра-
ничителя.
4.2 Ремонт блока обработки данных
4.2.1 БОД предназначен для выполнения необходимых расчетов, индикации пара-
метров и режимов работы, а также для управления механизмами крана.
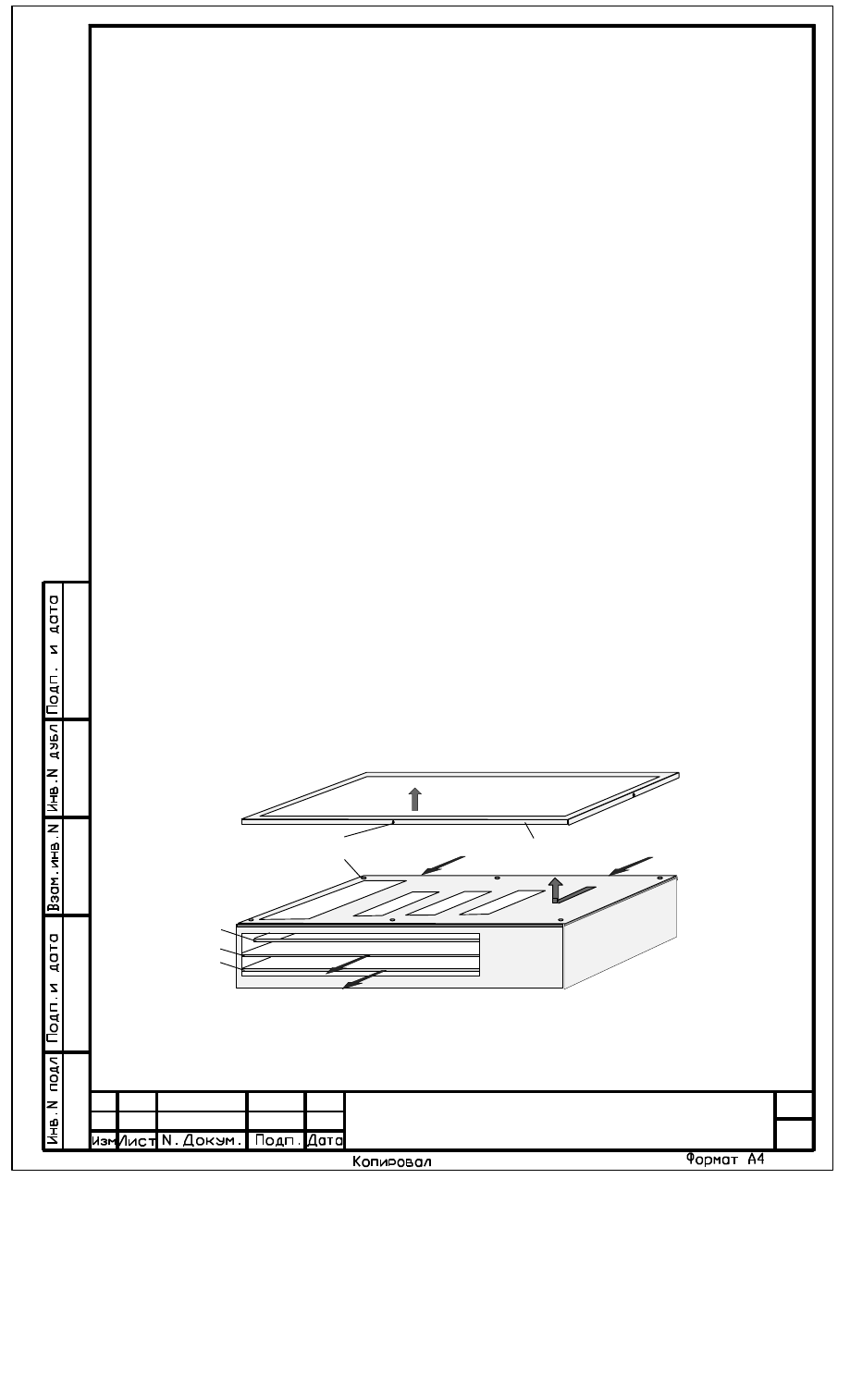
4.2.2 БОД состоит (см. рисунок 1) из трех функционально законченных устройств
(ФУ): источника питания (5), контроллера (4) и модуля индикации (3), каждое из которых вы-
полнено на отдельной печатной плате.
Электрическая связь между ФУ, а также между ФУ и выходными разъемами БОДа
обеспечивается через объединительную плату (кросс-плату).
Платы источника питания и контроллера устанавливаются в кросс-плату по направ-
ляющим через боковой люк в корпусе БОДа. Плата индикации закреплена на лицевой пане-
ли блока и посредством разъема устанавливается в ту же объединительную плату.
Кроме соединительных разъемов, на кросс-плате размещены также элементы
фильтра питания и ограничительный диод.
2
4
5
3
Б
А
6
1
Рисунок 1- Схема разборки БОДа