Electrical Engineering Dictionary - part 97
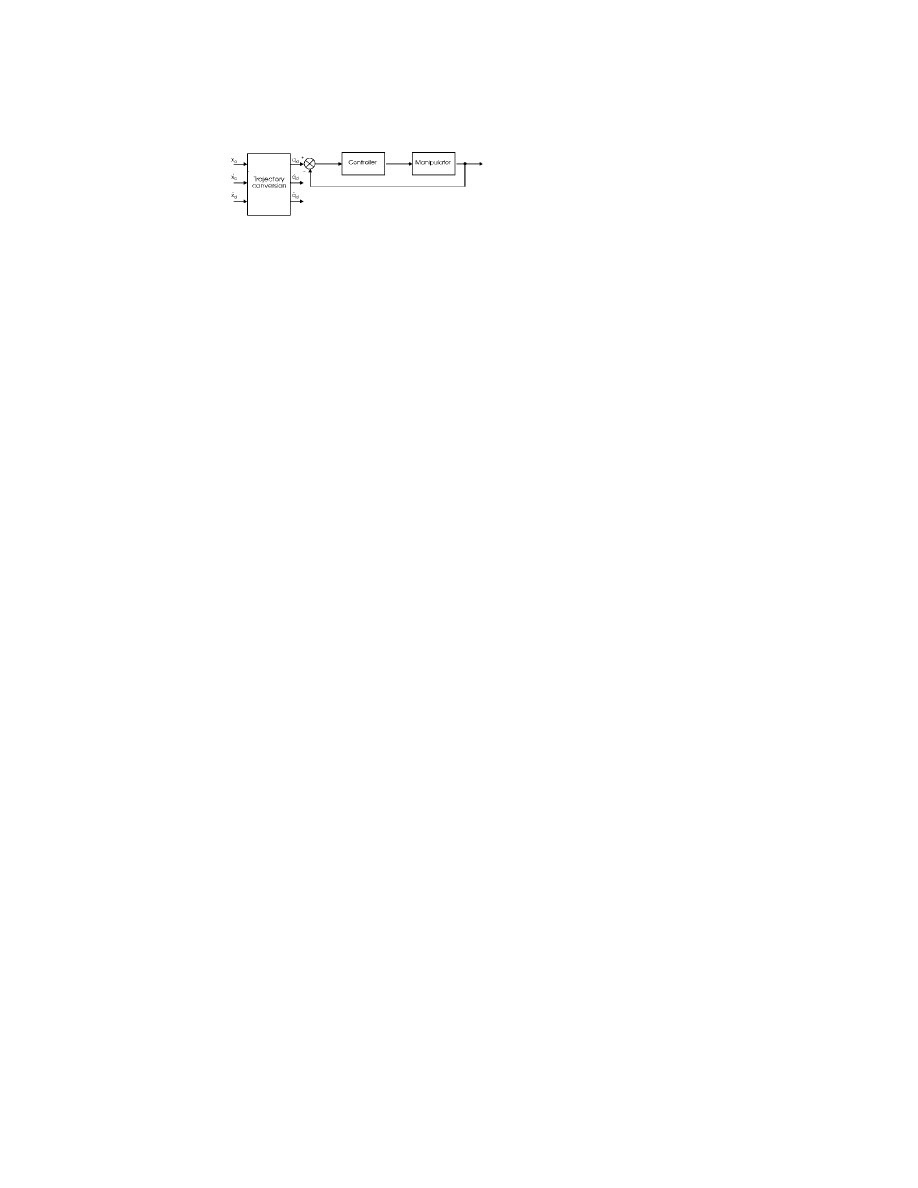
Joint space control scheme.
Joint Tactical Information Distribution
System (JTIDS)
system that uses spread
spectrum techniques for secure digital com-
munications; used for military applications.
joint time frequency analysis (JTFA)
techniques the aim of which is to repre-
sent and characterize a signal in time and
frequency domain simultaneously by using
different kinds of transformation and kernel
functions.
joint transform correlator
a type of opti-
cal correlator that employs two parallel paths,
one for each signal, instead of an in-line cas-
cade.
joystick
an input device in the form of a
control lever that transmits its movement in
two dimensions to a computer. Joysticks are
often used in games for control. They may
also have a number of buttons whose state
can be read by the computer.
JPEG
See
JPEG baseline
See
baseline.
JPEG DCT
there are two DCT modes of
JPEG, the sequential DCT mode and the pro-
gressive DCT-based mode. In the sequential
mode the image components are coded indi-
vidually or in blocks by a single scan in one
pass. In the progressive mode several scans
are taken to code parts of the quantized DCT
coefficients.
JTFA
See
JTIDS
See
jump instruction
an instruction that
causes an unconditional transfer of control to
a different instruction sequence in memory.
jump linear quadratic problem
opti-
mal control problem in which a controlled
process is modeled by linear system with
Markov jumps and a control objective is
to minimize an average quadratic criterion
given by
J = E{
Z
T
0
[x
0
(t)Q(ξ(t))x(t)
+ u
0
(t)R(ξ(t))u(t)]dt|x(0), ξ(0)}
where
x(t), u(t), ξ(t) denote, respectively,
process state, process control, and mode,
and matrices
R, Q are real valued, symmet-
ric respectively positive definite and positive
semidefinite weighting matrices of respective
dimensions
T is finite or infinite control hori-
zon and
E is an averaging operator. In the fi-
nite time case the optimal control law is given
as
u(t) = p(x(t), ξ(t), t) = −P (ξ(t), t)x(t)
for each
ξ(t) taking value in finite set S =
{1, 2, . . . , s} where
P (ξ, t) = R(ξ)
−1
B
0
(ξ)K(ξ, t)x(t)
where for each
ξ(t) = i matrices K(i, t) are
the unique positive semidefinite solutions of
differential coupled Riccati equations. As-
suming that the system is stochastically sta-
bilizable and for each
ξ(t) = i the pairs
(A(i),
√
Q(i)) are observable, then for in-
finite control interval
T → ∞ the solution
of the jump linear quadratic (JLQ) problem
is given by the optimal steady state control:
u(t) = ˆp(x(t), ξ(t))
= − ˆ
P (ξ(t))x(t)
= −R(ξ)
−1
B
0
(ξ) ˆ
K(ξ)x(t)
where for each
ξ(t) = i matrices ˆ
K(i) are
the unique positive semidefinite solutions of
algebraic coupled Riccati equations. This so-
lution may be also found as the steady-state
c
2000 by CRC Press LLC