содержание .. 18 19 20 21 ..
Механизмы в современной технике (Артоболевский) - часть 20
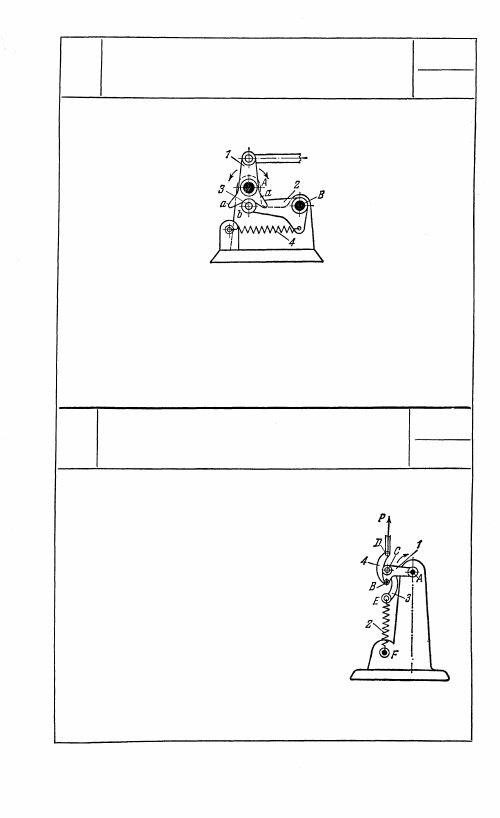
Рычаг 1, вращающийся вокруг неподвижной оси A, имеет две
лапки а. Рычаг 2, вращающийся вокруг неподвижной оси В,
имеет ролик b. При вращении рычага 1 лапки а нажимают на
ролик b и поворачивают рычаг 2. При прекращении воздействия
на рычаг 1 рычаг 2 под действием пружины 4 устанавливается
в положении, указанном на чертеже.
134
САМОУСТАНАВЛИВАЮЩИЙСЯ РЫЧАГ
ПР
Рычаг 1, вращающийся вокруг неподвижной
оси А, входит во вращательные пары В и С
со звеньями 4 и 3. Под действием силы Р,
приложенной в точке D, рычаг 1 поворачи-
вается вокруг оси А и возвращается при
прекращении действия силы в положение,
указанное на чертеже, под действием пру-
жины 2. При этом точки D, С, В, Е и F лежат
на одной прямой.
83
133
САМОУСТАНАВЛИВАЮЩИЙСЯ РЫЧАГ
ПР
Р
Р