Dodge Durango (HB). Manual - part 243
INSTALLATION
NOTE: If the ABM needs to be replaced, the rear axle type and tire revolutions per mile must be programed
into the new ABM. For axle type refer to Group 3 Differential and Driveline. For tire revolutions per mile
(Refer to 22 - TIRES/WHEELS/TIRES - SPECIFICATIONS). To program the ABM refer to the Appropriate Diag-
nostic Service Information.
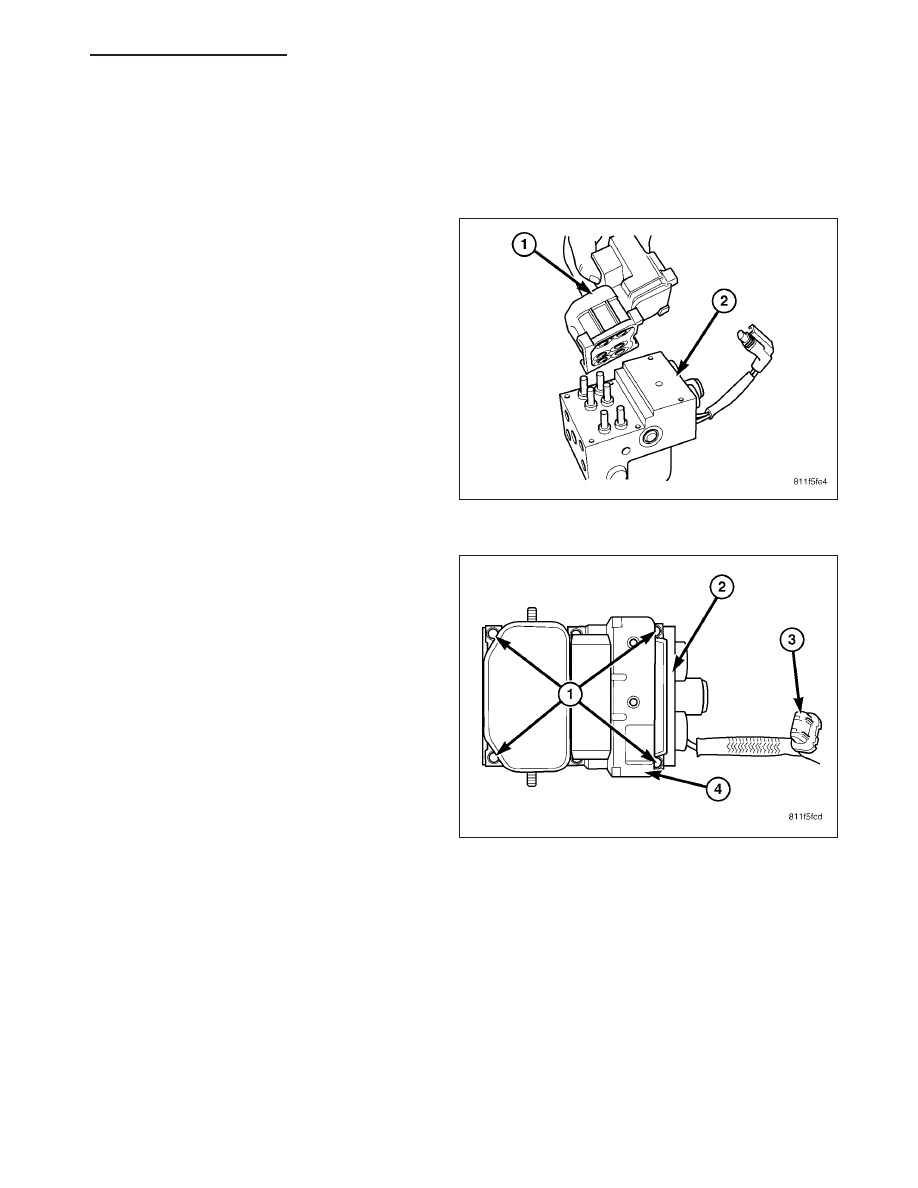
1. Position the module (1) on the HCU (2).
2. Install the mounting screws (1) and tighten to 6
N·m (53 in. lbs).
3. Install the pump electrical connector (3) to the
module (4).
4. Install the HCU to the vehicle (Refer to 5 -
BRAKES/HYDRAULIC/MECHANICAL/HCU
(HYDRAULIC CONTROL UNIT) - INSTALLATION).
COMMUNICATION
DESCRIPTION
The Controller Area Network (CAN) is a serial data bus communication network used for interconnecting numerous
electronic control modules throughout the vehicle in a two-wire multiplexed system. Within this context the term
serial refers to electronic data that is transferred bit by bit, while bus refers to the shared wires through which that
data is transferred. Multiplexing is any system that enables the transmission of multiple messages over a single
channel or circuit. The communication protocol being used is a non-proprietary, open standard adopted from the
Bosch CAN Specification 2.0b and uses an 11-bit message identifier.
There are actually three separate CAN bus systems used in the vehicle. They are designated: the CAN-B, the
CAN-C and the Diagnostic CAN-C. The CAN-B and CAN-C systems provide on-board communication between all
nodes in the vehicle. The CAN-C is the faster of the two systems providing near real-time communication (500
Kbps), but is less fault tolerant than the CAN-B system. The CAN-C is used exclusively for communications
between critical powertrain and chassis nodes. The slower (83.3 Kbps), but more fault tolerant CAN-B system is
HB
ELECTRONIC CONTROL MODULES - SERVICE INFORMATION
8E - 193