содержание .. 1 2 3 4 ..
Контроллер приточной вентиляции ТРМ133М-Х.04. Руководство по эксплуатации КУBФ. 421243.002 РЭ - часть 3
3
Устройство
и
работа
прибора
16
3.2
Структурная
схема
контроллера
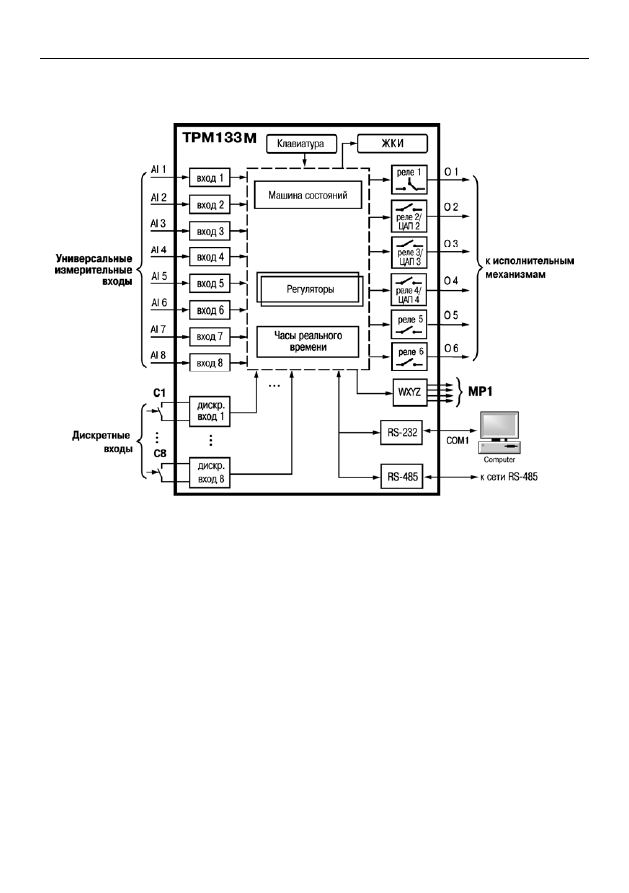
Структурная
схема
контроллера
представлена
на
рисунке
3.2.
Рисунок
3.2 –
Структурная
схема
контроллера
Примечание
–
Блоки
,
ограниченные
на
схеме
пунктиром
,
показаны
условно
и
функции
их
выполняются
микропроцессором
,
программируемым
на
предприятии
-
изготовителе
ТРМ
133
М
-04
в
соответствии
с
вариантом
модификации
контроллера
.
3.3
Аналоговые
входы
3.3.1
Назначение
К
универсальным
аналоговым
входам
(
контакты
12-23, 28-39,
см
.
рисунок
3.1)
подключаются
первичные
преобразователи
.
Первичные
преобразователи
(
датчики
)
преобразовывают
физические
параметры
объекта
в
электрические
величины
,
поступающие
в
контроллер
ТРМ
133
М
-04
для
их
дальнейшей
обработки
.
В
качестве
входных
датчиков
контроллера
ТРМ
133
М
-04
могут
быть
использованы
:
термометры
сопротивления
;
термопары
(
преобразователи
термоэлектрические
);
активные
преобразователи
с
выходным
аналоговым
сигналом
в
виде
постоянного
напряжения
или
тока
;
резистивные
датчики
.