Сибирский государственный университет путей сообщения
Научно-инженерный центр «Путеец»
Автоматизированная система съемки, расчетов и выправки пути
«НАВИГАТОР». Руководство по эксплуатации
Министерство путей сообщения Российской Федерации
Сибирский государственный университет путей сообщения
Научно-инженерный центр «Путеец»
Автоматизированная система съемки, расчетов и выправки пу- ти
«НАВИГАТОР»
Руководство по эксплуатации
Новосибирск, 2003 г.
Содержание Стр.
Введение 5
Описание системы и использование по назначению 7
Назначение системы 7
Состав, характеристики и основные функции 8
Принцип действия и режимы работы 17
Установка системы 22
Общие положения 22
Установка системы на машины типа ВПР 22
Размещение технических средств 22
Подключение системы к машине 23
Подготовка машины к работе с системой 23
Установка системы на машины типа Duomatic 09-32 GSM 24
Описание контроллера 25
Настройка системы 28
Общие положения 28
Настройка системы для машин ВПР 29
Подготовительные работы 29
Меню программы «Настройка» 30
Ввод параметров машины 32
Конфигурация параметров системы 33
Калибровка датчиков и создание электронных линеек 35
Ввод поправок и привязка показаний датчиков к натурным
измерениям 37
Настройка и проверка сервовентелей 40
Настройка индикаторов 42
Калибровка датчика пути 43
Контрольный заезд 44
Выход из программы «Настройка» 45
Настройка системы для машин Duomatic 46
Подготовительные работы 46
Меню программы «Настройка» 46
Конфигурация параметров системы 47
Калибровка датчиков и создание электронных линеек 48
Ввод поправок и привязка датчиков к натурным измерениям 49
Калибровка задатчика «Переподъемка» 49
Настройка системы для машин Unimat 50
Подготовительные работы 50
Меню программы «Настройка» 50
Конфигурация параметров системы 51
Калибровка датчиков и создание электронных линеек 52
Ввод поправок и привязка датчиков к натурным измерениям 52
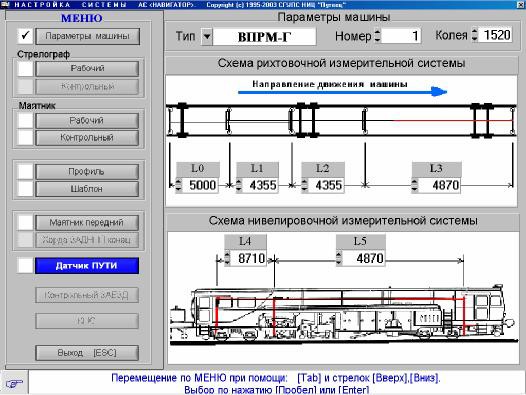
Настройка системы для машин ВПРМ-Г 53
Подготовительные работы 53
Меню программы «Настройка» 53
Ввод параметров машины 54
Конфигурация параметров системы 55
Калибровка датчиков и создание электронных линеек 55
Ввод поправок и привязка датчиков к натурным измерениям 56
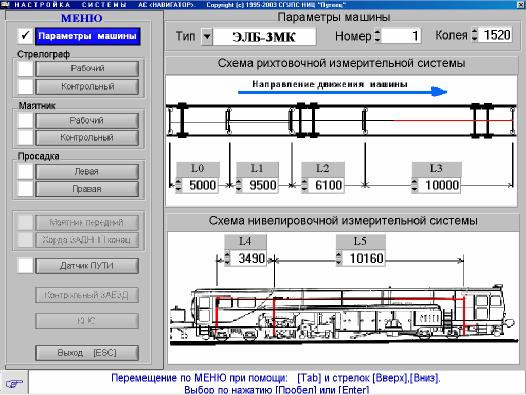
3.6 Настройка системы для машин ЭЛБ
57
3.6.1 Подготовительные работы
57
3.6.2 Меню программы «Настройка»
57
3.6.3 Конфигурация параметров системы
58
3.6.4 Калибровка датчиков и создание электронных линеек
59
3.6.5 Ввод поправок и привязка датчиков к натурным
измерениям
59
4.
Съемка
60
4.1 Общие положения
60
4.2 Начало съемки
60
4.3 Подготовка машины к съемке
63
4.4 Экранные формы меню программы «Съемка»
63
4.5 Ввод маркеров
65
4.6 Окончание съемки
66
4.7 Сохранение результатов съемки
66
5.
Расчет
67
5.1 Общие положения
67
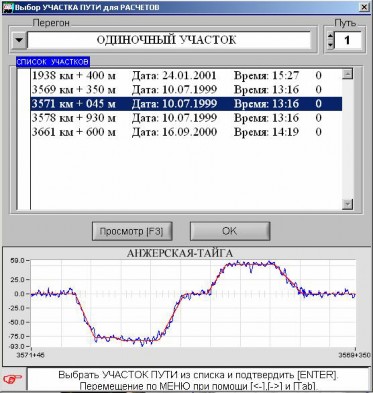
5.2 Выбор участка для расчета
67
5.3 Меню программы «Расчет»
69
5.4 Установки «Расчета»
70
5.5 Автоматический расчет и анализ результатов
71
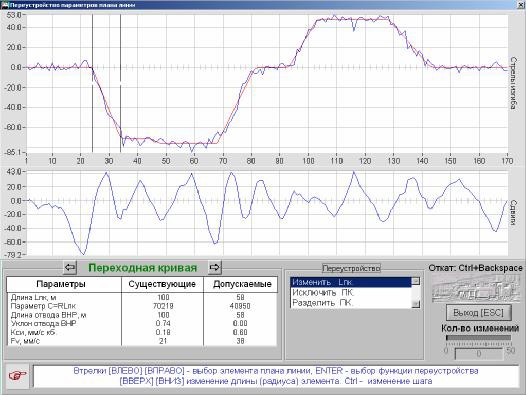
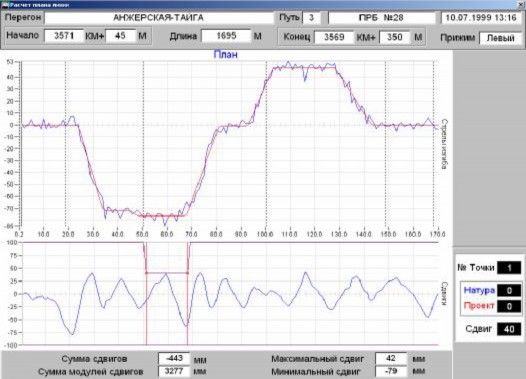
5.6 Переустройство плана линии
72
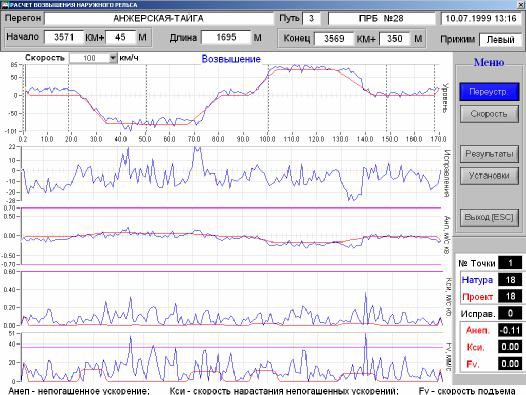
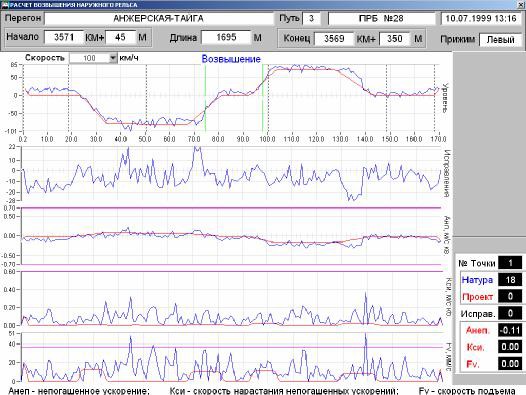
5.7 Переустройство возвышения наружного рельса
74
5.8 Переустройство продольного профиля
76
5.9 Результаты расчетов
77
5.10 Печать результатов
80
6.
Выправка
81
6.1 Общие положения
81
6.2 Начало выправки
82
6.3 Подготовка машины к выправке
82
6.4 Экран выправки и действия машиниста
82
6.5 Автоматический и ручной режим
87
6.6 Задатчики
88
6.7 Совмещение программного задания по маркерам
88
6.8 Окончание выправки – экстренный отвод
89
7.
Утилиты
91
8.
Техническое обслуживание
92
9.
Гарантийные обязательства
93
Возможные неисправности и методы их устранения 94
Свидетельство о приемке 95
Приложение А. Пример результатов расчета 96
Приложение B. Схемы подключения АС «Навигатор» к выправочным машинам
тяжелого типа
Приложение С Положение о выправке пути и стрелочных переводов в
профиле, плане и по уровню машинами Дуоматик и Унимат, оборудован-
ными автоматизированными системами выправки
Приложение D. Результаты приемочных испытаний автоматизированной
системы «Навигатор» на машине Duomatic 09-32 CSM
111
117
127
Введение
«Задачи навигации - нахождение оптимального маршрута (траектории),
определение местоположе- ния, направления и значения скорости и
других па- раметров движения объекта»
Энциклопедический словарь, 1987 г.
Решение задач навигации при выправке железнодорожного пути имеет
особое значение, т.к. результаты выправки определяют условия
комфортабельного и безопасного движения не одного объекта, а
множества поездов. Кроме того, условия взаимодействия поездов с
направ- ляющим механизмом, в качестве которого служит путь, намного
жестче, чем в других транс- портных системах. Поэтому создание
автоматизированных систем, способных решать навига- ционные задачи
для инженерно – информационного обеспечения выправочных работ при
со- держании и ремонтах пути, особенно актуально и необходимо.
Настоящее «Руководство» содержит описание и рекомендации по
использованию «Ав- томатизированной системы съемки, расчетов и
выправки пути», получившей название «Навига- тор». В дальнейшем в
тексте будут использоваться термины «Система» или «Навигатор», обо-
значающие описываемый аппаратно-программный комплекс на базе
портативного компьютера, устанавливаемый на путевые машины,
занимающиеся выправкой и/или рихтовкой пути.
Задачи «Навигатора» выходят далеко за рамки простой
микропроцессорной или компь- ютерной системы управления машинной
выправкой пути по априорной информации о геомет- рических параметрах
участка, получаемой вне системы.
Основное отличие «Навигатора» заключается в том, что он решает все
необходимые за- дачи по:
оптимизации пространственного положения пути с учетом условий
эксплуатации по данным детальной машинной съемки;
построению непрерывных программных заданий, обеспечивающих
высокоточную постановку пути в заданное положение в плане,
продольном и поперечном профиле;
анализу допускаемых скоростей движения поездов;
документированию результатов измерений, расчетов и выправки;
управлению специализированной базой данных.
Разработчиками системы учтены замечания и предложения
пользователей, с учетом ко- торых переработано программное
обеспечение «Навигатора» и c середины августа 2003 г. рас-
пространяется новая версия системы 4.62, отличительные
особенности которой:
автоматическое вычисление поправок к показаниям датчиков стрел
изгиба в плане и профиле по результатам контрольного
заезда;
гибкий и простой графический интерфейс просмотра и
редактирования результатов расчетов с учетом дополнительных
требований и ограничений;
автоматическое устройство и восстановление экстренных
отводов при вынужден- ном уходе с перегона;
программная функция ручных задатчиков, регулирующих процесс
автоматической выправки пути;
доступ к системным настройкам и программам компьютера –
подключение функции
«Утилиты».
Круг решаемых задач по сложности и ответственности определяет требования
к уровню специальной подготовки обслуживающего персонала:
навыки работы на персональном компьютере в объеме 1-2 недельных
курсов пользователей;
знание технологических требований к устройству пути в плане,
продольном и поперечном профиле;
знание теории и навыки в расчетах выправки кривых;
навыки в эксплуатации электротехнических устройств.
Автоматизированная система съемки, расчетов и выправки пути
«Навигатор» разрабо- тана научно-инженерным центром «Путеец»
Сибирского государственного университета путей сообщения и
внедряется на железных дорогах Российской федерации согласно
Указаниям МПС
№ С-117у от 17 февраля 1999 года.
1. Описание
системы
Назначение системы
Автоматизированная система «Навигатор» является
аппаратно-программным комплек- сом на базе портативного
компьютера для инженерно-информационного обеспечения
машин- ной выправки пути в плане, продольном и
поперечном профиле.
«Навигатор» предназначен для автоматизации работ по:
машинной съемке натурного положения пути в плане,
продольном и поперечном профиле;
расчетам координат существующего пути в плане и
профиле по стрелам изгиба асимметричных хорд путевой
машины;
расчетам оптимального пространственного положения
пути с учетом условий экс- плуатации, технических,
габаритных и иных требований и ограничений;
управлению машинной выправкой с точной постановкой
пути в заданное положение в плане, профиле и по
уровню при текущем содержании и ремонтах пути с
использо- ванием путевых машин типа ВПР, ВПРС, Р,
ПРБ, Duomatic и Unimat;
документированию результатов расчетов и
паспортизации параметров плана линии, продольного
профиля и возвышения наружного рельса;
анализу допускаемых скоростей движения поездов по
элементам плана линии и их сопряжениям;
созданию и ведению базы данных натурных измерений и
результатов расчетов;
обмену данными с другими подсистемами АСУ путевого
хозяйства на различных уровнях управления (ПЧ, П,
ЦП), в том числе по каналам модемной связи.
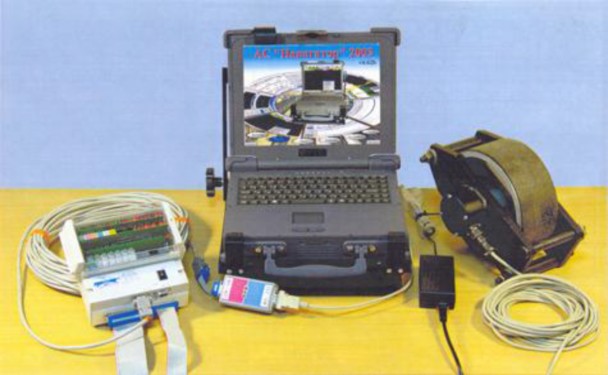
Малогабаритные блоки технических средств системы
размещаются в рабочей кабине пу- тевой машины.
Посредством специализированного программируемого
микропроцессорного контроллера бортовой компьютер
соединяется с контрольно-измерительной системой и
рабо- чими органами путевой машины. Контроллер
обеспечивает преобразование аналоговой измери-
тельной информации от штатных датчиков путевой
машины в цифровой код, с заданным шагом квантования,
передает их в компьютер, а так же получает цифровую
информацию от компью- тера для формирования сигналов
управления выправочными устройствами и индикаторами
машины.
Для машин типа ВПР технические средства системы
размещаются в кабине машиниста путевой машины. Компьютер
устанавливается на специальной платформе в
непосредственной близости от пульта выправки в рабочей
зоне машиниста, контроллер и блок питания закрепля- ются
на стенке кабины.
Рис. 1.1. Комплекс технических средств системы
Контроллер соединен со штатной системой посредством
клеммной (коммутационной) платы. Связь между компьютером
и контроллером осуществляется по последовательному
интерфейсу (RS-232, RS-422), соединение осуществляется
посредством стандартного кабеля связи.
Для машин типа Duomatic, Unimat, ВПРС-03 и ВПРМ-02К
система “Навигатор” оснащена новым контроллером,
обеспечивающим:
Диагностику входных и выходных сигналов при помощи
обратной связи с использова- нием светодиодов;
Простой переход в штатный режим путем выключения
контроллера;
Связь с компьютером в промышленных условиях
эксплуатации на расстоянии не менее
50 метров (управляющий котроллер расположен в передней
кабине);
Создание рабочего места инженера-технолога в передней
кабине позволило одновре- менно вести процесс управления
выправкой, т.к. программные задатчики функции “Выправка”
позволяют ему вмешиваться в процесс управления выправкой
с учетом информации на экране компьютера. Это
обеспечивает повышение производительности и качества
выправки пути.
Реализован режим “съемка назад”, сокращающий время
подготовительных работ перед выправкой.
Рис. 1.2 Структурная схема подключения АС “Навигатор”
для ВПР(ВПРС) и ВПРМ-02К
Рис.1.3 Структурная схема подключения АС “Навигатор” для
Duomatic
Рис.1.4 Структурная схема подключения АС “Навигатор” для
Unimat
Основные характеристики системы Съемка натурного
положения пути
Шаг квантования измерительной информации:
по длине пути, мм: 625
по амплитуде, мм: 0,1
Частота опроса датчиков, Гц: 10-90
Количество маркеров путевой разметки: 100
Количество типов маркеров: 15
Расчеты оптимального положения пути
Точность представления чисел с плавающей запятой,
разрядов: 64
Точность преобразования натурных стрел изгиба
асимметричных хорд в плане и про- дольном профиле в
кривизну пути на шаге измерений (0,625 м), мм: 10-6
Точность вычисления натурных стрел изгиба стандартной
хорды (10+10 м) в плане и профиле, мм: 0.5
Точность определения проектных параметров, в мм
В
плане и продольном профиле (радиусы, длины круговых и
переходных кривых, по- ложение характерных точек): 0.5
По
уровню (ВНР в круговых кривых, длины отводов ВНР,
положение отводов ВНР):
0.5
Точность определения расчетных перемещений пути (сдвигов
в плане, подъемок в про- филе, исправления по уровню),
мм: 0.5
Точность построения программных заданий для управления
машинной выправкой пути в плане, продольном и поперечном
профиле, мм: 0.5
Точность определения изменения длин рельсовых нитей при
рихтовке пути, мм: 0.5
Точность определения допускаемых скоростей движения
поездов, км/ч: 0.5
Выправка пути
Способ выправки пути: - по точному расчету оптимальных
параметров
плана линии, продольного профиля и возвыше- ния
наружного рельса.
Способ управления выправкой пути:
В плане: - сравнение текущих стрел изгиба трехточечной
хорды с эталонными стрелами программного задания, с
учетом смещения переднего конца хорды с проектной оси.
По уровню: - сравнение текущего значения натурного
уровня с проектным.
Точность постановки пути в заданное положение
в плане, продольном и поперечном профиле, мм: 0.5
Способ учета упругости пути
при рихтовке: -вычисление коэффициента упругости и
перерихтовки в каждом сечении пути
Режим выправки пути:
автоматический: - постоянно
ручной: - при срыве ПРУ или плохом состоянии ВСП
Способ контроля результатов
рихтовки пути: определение отклонений от проектной оси
по показаниям контрольного стрелографа Способ контроля программного
задания: привязка к путевой разметке по маркерам
Общие параметры бортового компьютера:
Процессор Intel
Pentium 100 МГц и выше Память не
менее 16 Мбайт
Дисковые накопители винчестер
от 810 Мбайт.
3,5” НГМД на 1,44 Мбайт
Дисплей цветной
ЖКИ на активной матрице, разрешение 800х600,
64 тысячи цветов
Клавиатура влагозащищенная
мембранная клавиатура Порты ввода/вывода последовательный
порт RS-232, USB
параллельный порт типа Centronics
гнездо для подключения внешнего источника питания Возможности
расшир. два
гнезда стандарта PCMCIA, допускающие установку двух
карт типа 1 или 2, или одной карты типа 3
Электрические параметры:
вход переменного тока от 90 до 264В, частота от 47 до 63 Гц
от 10 до 32 В – через дополнительный адаптер
Условия окружающей среды: Температура от
+0 до 35 С
хранение минус 40 до плюс 60 С
Влажность Рабочий
режим: от 20 до 80% Режим хранения: от 10 до 90%.
Рабочий режим:
Вибрация в соответствии
Направление движения: вдоль осей X,Y,Z Уровень вибрации: 5~500~5 Гц,
ускорение 0.5g Продолжительность: 60 мин. для каждой из осей
Режим хранения:
Направление движения: вдоль осей X,Y,Z Уровень вибрации: 5~500~5 Гц,
ускорение 2.0 g Продолжительность: 60 мин. для каждой из осей.
Удары в соответствии Рабочий режим:
Допустимое воздействие: от 1g до 10g, синусоидальная волна,
в течение 11 мс
Количество ударов: по 3 удара с каждой из 6 сторон Направление движения:
6 сторон
Режим хранения:
Допустимое воздействие: от 1g до 50g, синусоидальная волна,
в течение 11 мс
Количество ударов: по 3 удара с каждой из 6 сторон Направление движения:
6 сторон
Входное напряжение, В: от -15 до +15 или от 0 до +27
Количество разрядов АПЦ: 12
Время преобразования АЦП, мкс.: 7
Количество выходных аналоговых каналов: 8
Разрядность ЦАП: 10
Время преобразования ЦАП мкс: 5
Выходное напряжение, В: от минус 5 до плюс 5
Количество цифровых каналов: 8
Тип развязки: оптический
Количество релейных каналов: 6
Напряжение питания, В: от 10 до 40
Потребляемая мощность, Вт 0,5
Помехозащищенность, дБ: 40
Вес, кг: 0,15
Температурный диапазон, С:
от минус 10 до плюс 80
Корпус: термопластовый
Степень защиты: IP65
Температурный диапазон, С:
от минус 40 до плюс 100
Габариты, мм: 190х160х105
Блок питания
Тип: импульсный
Входное напряжение, В: от 10 до 40
Выходное напряжение, В: от 12 до 20.5
Погрешность стабилизации, В: 0.1
Мощность, Вт: 50
Помехозащищенность, дБ: 40
Защита: по короткому замыканию и превышению входного напряжения
Температурный диапазон, С:
от минус 10 до плюс 60
Габариты, мм: 120х60х30
Масса, кг: 0,3
Программное обеспечение «Навигатора» содержит следующие основные
функции:
Рис. 1.5. Основные функции АС «Навигатор»
Функция НАСТРОЙКА – поддерживает ввод параметров
контрольно-измерительной сис- темы путевой машины, связь бортового
компьютера с контроллером при калибровке датчиков, индикаторов и
исполнительных органов путевой машины;
Функция СЪЕМКА – осуществляет ввод данных для идентификации участка
натурных измерений, связь бортового компьютера с контроллером при опросе
датчиков измерительной информации, визуализацию процесса измерений и
сохранение полученных данных;
Функция РАСЧЕТ – программа оптимизации пространственного положения пути,
визуа- лизации, документирования и сохранения в БД результатов расчетов,
определения допускаемых скоростей движения поездов и построения
программных заданий для управления машинной выправкой пути;
Функция ВЫПРАВКА – обеспечивает связь между бортовым компьютером и
контролле- ром, считывает текущую информацию с датчиков, вычисляет
отклонения от проектного положения в текущем сечении пути, визуализирует
процесс выправки, передает управляющие сигналы на исполнительные органы
и индикаторы путевой машины, вычисляет отклонения от проектной оси по
данным контрольного стрелографа, сохраняет в БД результаты выправки;
Функция БАЗА ДАННЫХ – обеспечивает накопление, хранение и использование
ин- формации:
о параметрах контрольно-измерительной системы путевой машины и
результатах калибровки датчиков, индикаторов и исполнительных
органов;
о перегонах;
о снятых, рассчитанных и выправленных участках пути;
о результатах натурных измерений положения пути в плане, продольном
и попе- речном профиле;
о результатах расчетов оптимального положения пути (проектные
параметры, разбивочные данные, допускаемые скорости);
о программных заданиях для управления машинной выправкой пути;
о результатах выправки пути.
Функция УТИЛИТЫ – набор доступных системных программ для
обслуживания борто- вого компьютера.
Кроме того, при нажатии клавиши F1 происходит
загрузка справочной системы по рабо- те с АС «Навигатор», где
находится полный вариант руководства по эксплуатации программы,
нормативные акты, регламентирующие работу выправочных машин, и
другая документация, связанная с технологией машинной выправки пути.
Выход из программы осуществляется при нажатии клавиши ESC.
Принцип действия и режим работы
Принцип действия автоматизированной системы «Навигатор» основан на
оптимизации пространственного положения пути по данным машинной
съемки в плане, продольном и попе- речном профиле.
Стрелы изгиба асимметричных хорд путевой машины преобразуются в
кривизну пути на малом шаге измерений, по которой вычисляются
координаты натурного положения пути в спе- циальной криволинейной
ортогональной системе координат.
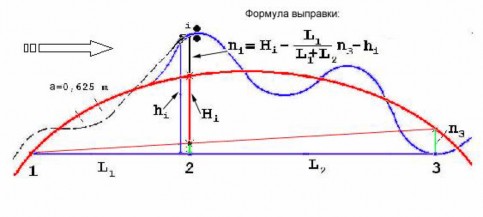
Рис. 1.6 Схема выправки
Для точной постановки пути в заданное (проектное) положение в плане
или продольном профиле путевой машиной необходимо в каждом сечении
пути знать значение проектной стре- лы изгиба машинной хорды и
величину расчетного сдвига (подъемки) в точке переднего конца хорды
(Рис.1.4.) Точные значения проектных стрел могут быть получены
единственным обра- зом – по параметрам эпюры проектной кривизны,
заданной положением характерных точек пе- реходных кривых и
значениями кривизны сопрягаемых ими круговых кривых (прямых).
Параметры эпюры проектной кривизны и расчетные перемещения пути
(сдвиги, подъем- ки) являются результатами расчетов оптимального
пространственного положения пути по
данным натурных измерений. В этих расчетах критериями оптимальности
параметров являются ограничения, накладываемые на расчетные
перемещения пути (нормали).
Обычно в задачах расчетов выправки пути в плане и профиле { EMBED
Equation.3 } и { EMBED
Equation.3 } критерии
оптимальности расчета (ограничения) задаются в виде требова- ний:
минимум выправочных работ { EMBED
Equation.3 },
(3)
В технологии машинной выправки пути критерий оптимальности расчетов
(5), связанный с ограничениями перемещений по длине участка, играет
особую роль:
заданный коридор возможных перемещений пути определяет максимальные
амплиту- ды устраняемых расстройств;
расстройства пути с амплитудами, превышающими заданные ограничения,
описыва- ются дополнительными радиусами;
эти ограничения описывают состояние габаритов, наличие балласта,
состояние зазоров и учитывают возможности путевой машины.
Задание допускаемых перемещений пути перед расчетом обязательно.
Методы расчетов выправки участков
пути неограниченной сложности в плане и про- филе, реализованные в
системе «Навигатор», обеспечивают получение строго параметрических
решений по проектной кривизне при безусловном выполнении критериев
оптимальности расче- та: определение минимального количества
параметров (элементов плана или профиля), удовле- творяющих
эксплуатационным требованиям и обеспечивающих минимум выправочных
работ при заданных ограничениях нормалей. Оптимизация параметров
плана и профиля осуществля- ется при помощи ряда процедур,
основанных на зависимостях теории нормалей.
Вначале, в заданной системе ограничений на сдвиги (подъемки)
выделяются участки по- стоянной кривизны (прямые и круговые кривые),
затем аналитически, по двум моментам полу- ченных проектных стрел
изгиба, определяется положение характерных точек сопрягающих их
переходных кривых.
Параболическая аппроксимация нормалей в пределах круговых кривых
позволяет уточ- нять значения радиусов, длин переходных и круговых
кривых, положение тангенсов для удов- летворения принятых критериев
оптимальности расчета.
Параметры эпюры возвышения наружного рельса (ВНР) определяются в
соответствии с проектной кривизной плана линии:
ВНР в круговой кривой прямо пропорционально ее проектной
кривизне;
отводы ВНР совпадают с отводами кривизны в плане;
в случае отсутствия в плане переходной кривой при сопряжении
близких радиу- сов длина отвода принимается равной 20 м.
Расчеты выправки пути в продольном профиле имеют ряд
особенностей:
параметры продольного профиля оптимизируются с учетом средней
подъемки,
{ EMBED
Equation.3 },
(9)
где { EMBED
Equation.3 } –
минимальная подъемка, необходимая для обеспечения ус- ловий
подбивки шпал;
на границах участка устраиваются отводы с уклоном, вычисляемым в
зависимо- сти от заданной максимальной скорости движения
поездов;
расчеты выправки продольного профиля ведутся по заданному
базовому рельсу с учетом ВНР;
диапазон возможных подъемок уменьшается на величину исправлений
по уровню.
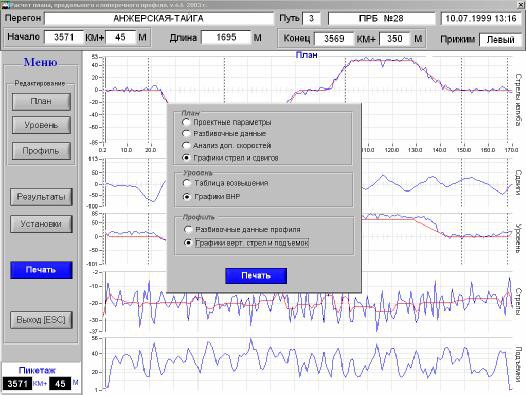
Результаты расчетов выводятся на экран и печать в виде графиков
и таблиц проектных параметров, разбивочных данных и программных
заданий для управления машинной выправ- кой
Результаты расчетов являются готовыми паспортами криволинейных
участков, которые могут передаваться в другие подсистемы АСУ
путевого хозяйства для инженерно- информационного обеспечения
путевых работ. Они также могут использоваться при расшиф- ровке
показаний вагонов-путеизмерителей, в том числе оборудованных
компьютерными сис- темами.
Система «Навигатор» работает в трех основных режимах: «Съемка»,
«Расчет», «Вы-
правка».
Съемка натурного положения пути в
плане, продольном и поперечном профиле осу- ществляется
предварительно настроенной машиной на выбранном с использованием
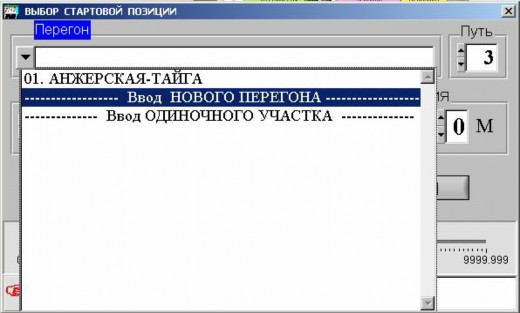
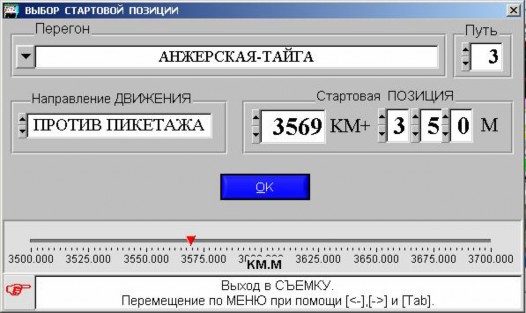
базы дан- ных участке с назначенной стартовой позиции.
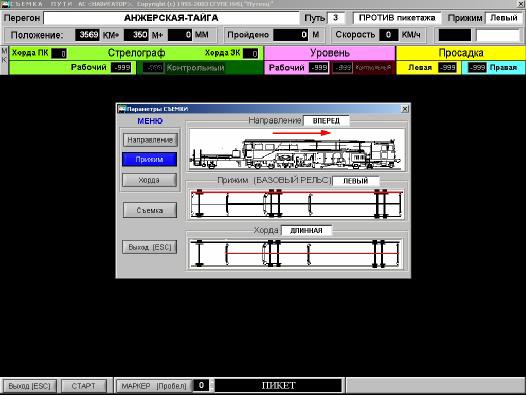
Перед началом съемки назначается, устанавливается и вводится в
компьютер тип прижа- тия тележек измерительной системы (ЛЕВОЕ
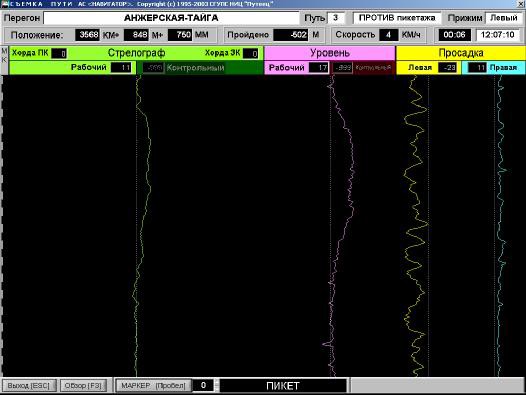
или ПРАВОЕ). В процессе съемки осуществляется
постоянное сканирование показаний датчиков измерительной
информации с частотой 10 Гц, которые заносятся в память
компьютера с шагом 0,625 м, вычисляемым по показаниям датчика
пути. Аналоговые значения показаний датчиков преобразуются АЦП
контроллера в цифровой код, по которому вычисляются значения
измеряемых величин в миллиметрах с учетом калибро- вок датчиков
и поправок привязок к пути.
Для получения координат натурного положения пути в плане и
продольном профиле стрелы изгиба асимметричных хорд путевой
машины преобразуются в кривизну пути на шаге 0,625 м с
использованием высокочастотных цифровых фильтров и интегральных
преобразова- ний. По значениям натурной кривизны на шаге
измерений вычисляются натурные стрелы изгиба стандартной хорды
(10+10 м) с шагом 10 м, которые используются в расчетах
оптимального пространственного положения пути. Для расчетов
сдвигов и подъемок левого и правого рельса в промежуточных
точках используются значения натурной и проектной кривизны на
шаге измерения.
Результаты измерений натурного положения пути в плане, по уровню
и в продольном профиле сохраняются в БАЗЕ ДАННЫХ.
В процессе записи натурного положения пути могут отмечаться
точки расположения мар- керов путевой разметки (пикетаж, опоры
контактной сети, ИССО и др.).
Программное обеспечение системы поддерживает ввод и обработку
информации о натур- ном положении пути в плане, профиле и по
уровню по данным ручных измерений, выполненных различными
способами.
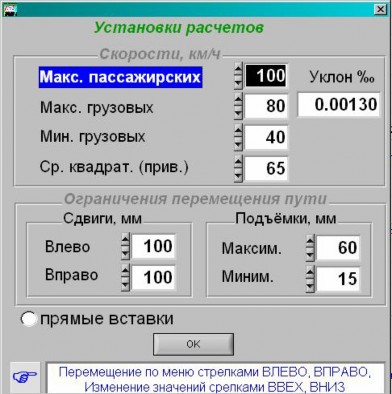
Расчеты оптимального пространственного положения пути. Необходимый
для расче- тов участок пути выбирается из БАЗЫ ДАННЫХ. Перед
расчетом необходимо задать или отредактировать предложенные
компьютером условия эксплуатации – скорости движения поездов,
ограничения сдвигов и подъемок пути.
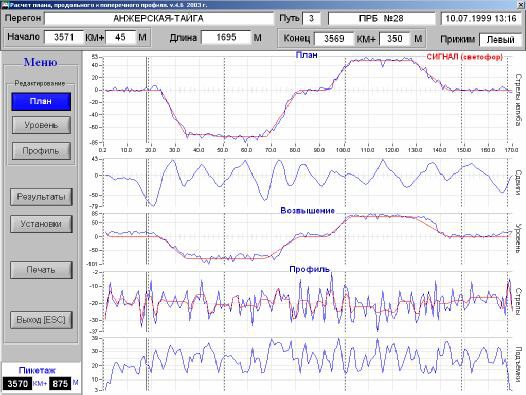
Расчет выполняется автоматически, и на экран выводятся графики
результатов. Де- тальный просмотр и редактирование результатов
расчетов по плану, уровню (ВНР) и продольно- му профилю
позволяют откорректировать проектные параметры или расчетные
перемещения пути с учетом дополнительных требований к расчетам.
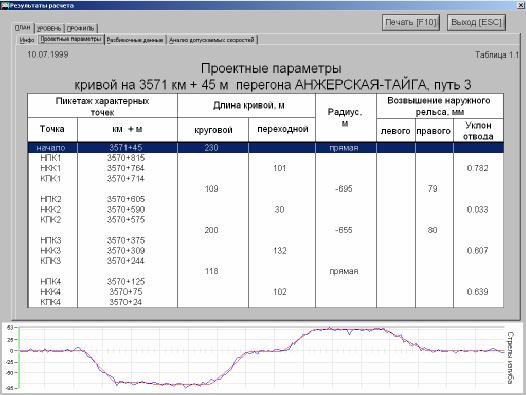
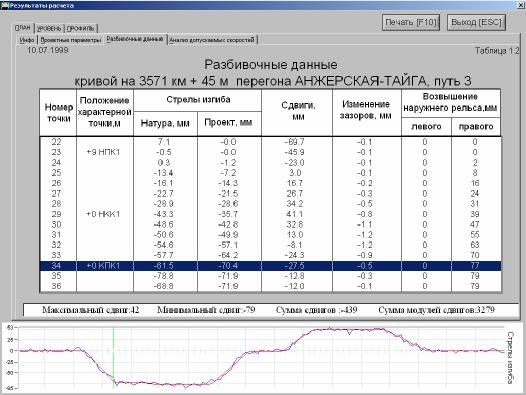
Результаты расчетов выводятся на экран и печать в виде таблиц,
содержащих про- ектные параметры и разбивочные данные:
по плану линии – радиусы, длины переходных и круговых кривых
(прямых), положе- ние характерных точек кривых, расчетные сдвиги,
изменения длин рельсовых нитей при рихтовке;
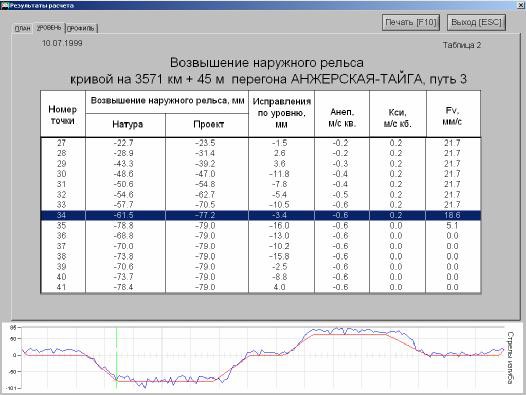
по уровню – ВНР в круговых кривых, длины и уклоны отводов ВНР,
проектное ВНР по точкам деления пути, исправления по уровню;
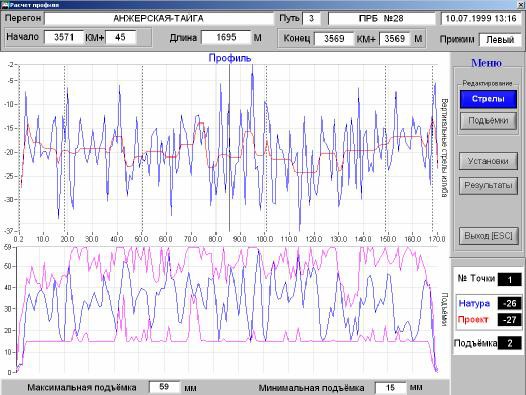
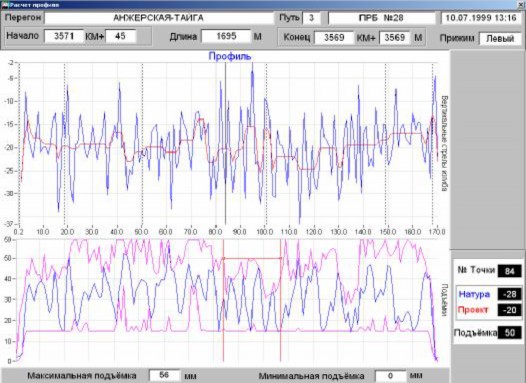
по продольному профилю – длины и уклоны элементов, радиусы
вертикальных кри- вых, подъемки.
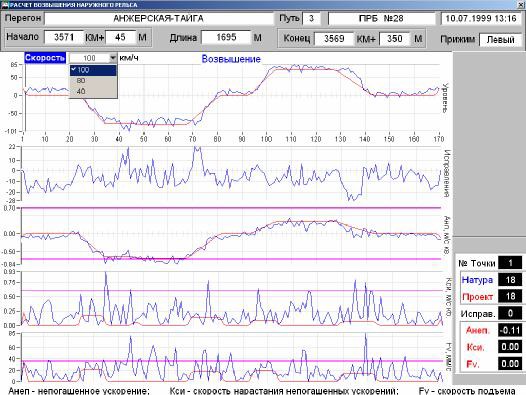
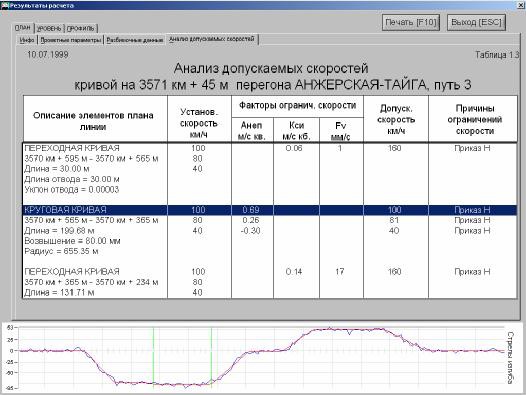
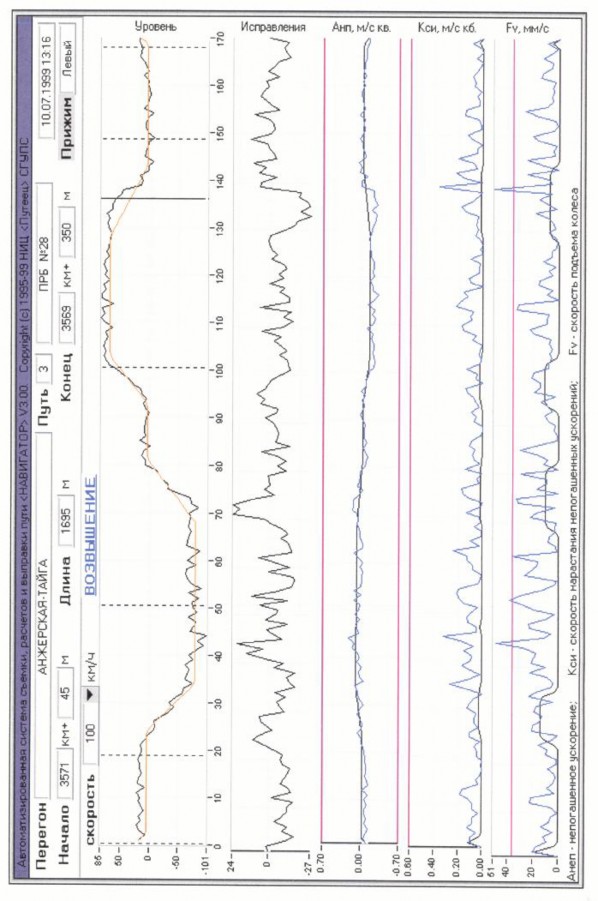
По параметрам кривых и их сопряжений определяются непогашенные
ускорения, скорости их нарастания и скорости подъема колеса на
возвышение наружного рельса, по которым определяются допускаемые
скорости движения пассажирских и грузовых поездов или причины
ограничений скорости.
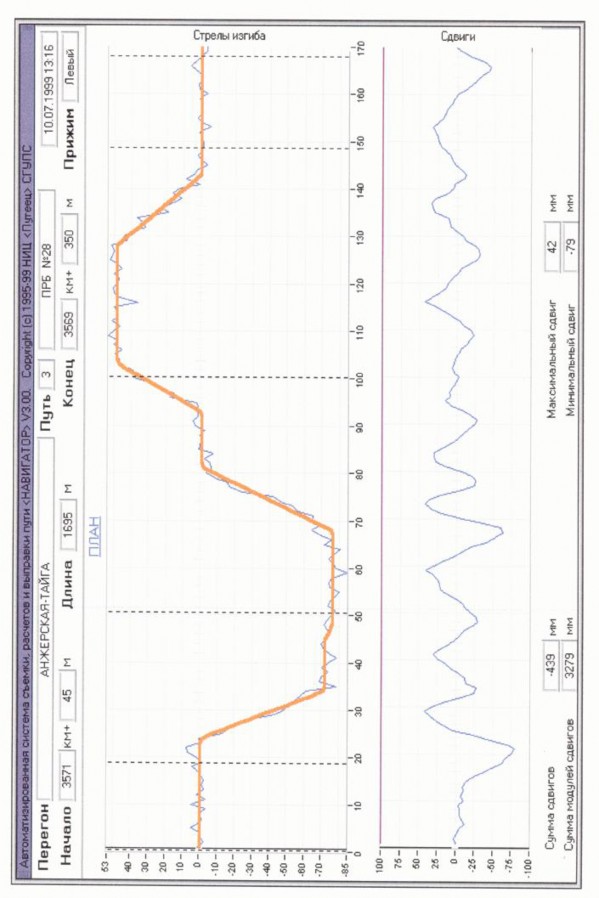
По результатам расчетов строятся программные задания управления
машинной выправкой пути в плане, по уровню и в продольном профиле, с
шагом 0,625 м:
проектные стрелы изгиба рабочего стрелографа путевой машины,
построенные по па- раметрам проектной кривизны пути в плане;
расчетные сдвиги пути;
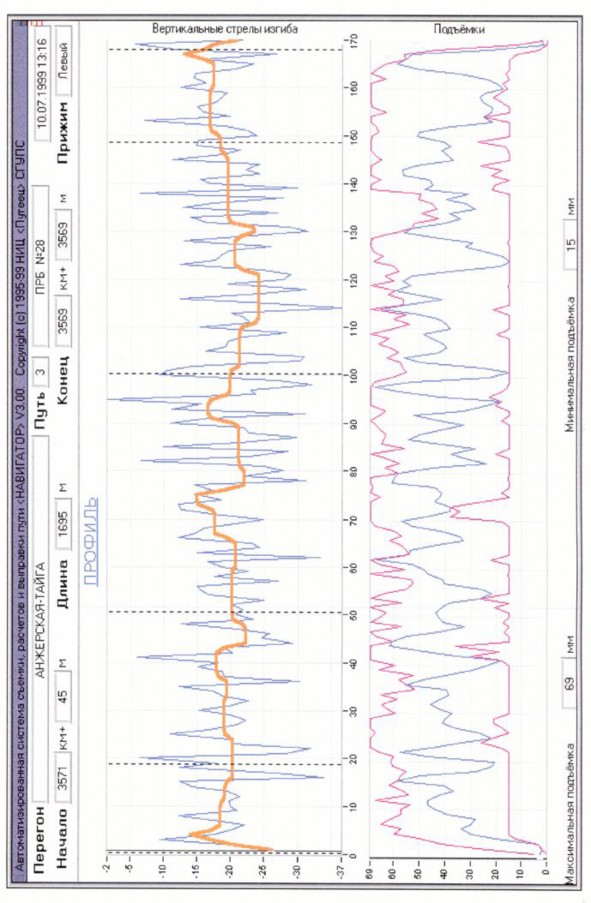
проектные стрелы изгиба в вертикальной плоскости нивелировочных хорд
левой и правой рельсовой нити, построенные по параметрам проектной
кривизны пути в про- филе;
расчетные подъемки левого и правого рельса;
проектное возвышение наружного рельса.
Машинная выправка одновременно
в плане, профиле и по уровню осуществляется на выбранном с
использованием БАЗЫ ДАННЫХ участке пути.
Путевая машина с настроенной контрольно-измерительной системой
устанавливается на стартовую позицию, с которой начинались натурные
измерения. Изменяемые под воздействием рабочих механизмов путевой машины
(ПРУ) значения показаний датчиков уровня и стрел из- гиба в плане и
профиле сканируются с частотой 10 Гц. Преобразованные АЦП в цифровой код
и далее, с учетом соответствующих калибровок - в миллиметры, значения
измеряемых величин сравниваются с эталонными значениями программного
задания. Значения программного зада- ния обновляются через 0,625 м, а в
промежуточных сечениях пути интерполируются. Эталон- ными стрелами
изгиба в плане или профиле являются проектные стрелы изгиба машинных
хорд, исправленные на величину, пропорциональную расчетному перемещению
пути в перед- ней точке хорды.
Вычисленные значения отклонений натурных значений от эталонных при
помощи ЦАП преобразуются в управляющие сигналы для пропорционального
управления работой сервовен- тилей и индикаторных приборов машины.
Процесс выправки отображается на экране компью- тера, где кроме цифровых
значений и графиков дублируются показания индикаторных прибо- ров.
Управление выправкой осуществляется в автоматическом режиме. При срыве
ПРУ и плохом состоянии верхнего строения пути применяется ручной режим
управления по показани- ям индикаторов. Предусмотрено автоматическое
устройство и восстановление экстренных от- водов.
Положение выправленного пути в плане записывается по показаниям
контрольного стрелографа. После завершения работы на участке
автоматически вычисляются допущенные отклонения от проектной оси,
которые могут быть устранены сразу дополнительным проходом с выборочной
рихтовкой или приняты в качестве нового программного задания на
последую- щую выправку пути в плане по полученным проектным параметрам.
В процессе работы на экран выводятся введенные при съемке маркеры
путевой размет- ки, которые используются для автоматической коррекции
программного задания.
Установка системы
Общие положения
Ниже описан порядок действий по установке технических средств АС
«Навигатор» на пу- тевую машину и подготовке к работе с
системой. Программное обеспечение системы предвари- тельно
установлено на бортовой компьютер и по мере необходимости
обновляется наладчиком, обслуживающим машину.
ВНИМАНИЕ! АС «Навигатор» устанавливается на штатно
укомплектованную, ис- правную, настроенную и работоспособную
путевую машину.
Установка системы на машины типа ВПР
Размещение технических средств
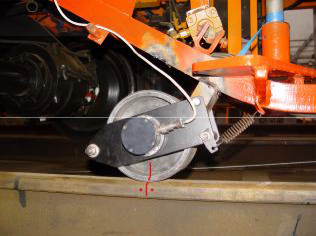
Мерное
колесо с датчиком пути закрепить на раме контрольной или
передней те- лежки.
Соединительный
кабель датчика пути закрепить в коробах и ввести в заднюю
ка- бину машины.
Контроллер
при помощи кронштейна закрепить на стенке блока управления
рих- товкой (рис 2.2.).
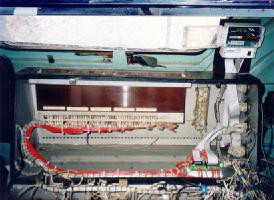
Клеммная
плата крепится внутри блока управления рихтовкой на днище
(рис.2.5).
Блок
питания фиксируется двумя металлическими скобами (рис 2.2.).
Полку
под компьютер закрепить на передней стенке рабочей кабины
машины
(рис 2.4.).
Рис.2.1 Монтаж соединительных
кабелей
Рис.2.2 Крепление контроллера и
блока питания
Рис.2.3 Крепление датчика пути Рис. 2.4 Крепление
компьютерной
полки
Подключение системы к машине
При
использовании клеммной платы провода подключить согласно
схеме
(см.Приложение) и увязать в жгуты (рис.2.5).
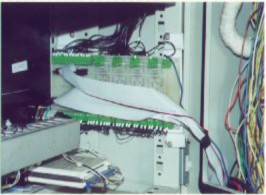
При
использовании коммуникационных плат отсоединить шлейфы
штатной системы в блоке управления рихтовкой от корзины (для
ВПР-02 разъемы Х14 и Х17; для ВПРС-03 разъемы Х17 и Х30).
Прикрепить к корзине согласно схеме (см. Приложе- ние)
переходные платы и к ним шлейфы штатной системы (рис.2.6).
Ленточные
кабели входных измерительных и выходных управляющих каналов
(J1 37 и J2 25) от клеммной платы или преходных плат через
отверстие в блоке управления рихтовкой подключить к
контроллеру.
Рис.2.5
Установка клеммной платы Рис. 2.6 Установка коммуникационных
плат
Блок
питания компьютера подключается к преобразователю
напряжения.
Преобразователь
напряжения подключить к общему автомату включения питания
(рис.2.2).
Соединить
контроллер с компьютером посредством кабеля связи.
ВНИМАНИЕ! Прокладка
кабелей осуществляется с выполнением требований
электробезопасности и с учетом защиты от пробоя на корпус,
перегибов и обрывов.
Подготовка машины к работе с системой
Переключить
тумблеры на блоке управления (рис 2.7.):
Рис 2.7 Положение тумблеров на блоке управления
«рихтовка» …………………………….автомат
«подъемка»……………………………нормальная
«Срыв захватов»………………………выключить
«Упругая отдача»……………………..выключить
«Рихтовка через цикл»………………..выключить
«Рихтовка с подбивкой»……………...включить
«Автомат 24 В»……………………….включить
Включить
РАБОЧИЙ режим.
Установить
в «0»:
Передние пиноли;
Передний конец хорды;
Задатчики подъемок левого и правого рельса.
Включить
тумблер на блоке питания.
Включить
компьютер и войти в ГЛАВНОЕ МЕНЮ СИСТЕМЫ.
ВНИМАНИЕ! Запрещается заводить двигатель путевой машины при включенном
блоке питания.
Установка системы на машины типа Duomatic 09-32 GSM
Рис. 2.8 Крепление компьютера Рис. 2.9 Крепление контроллера для
“Мультичека”
Полку
под компьютер закрепить в передней кабине машины.
Соединительный
кабель связи между контроллером и компьютером проложить в ко-
робе до рабочей кабины машины.
Блок
питания монтируется в пульте управления передней кабины.
Для машин, оборудованных системой “Мультичек”:
Контроллер
закрепить сбоку от блока управления.
Клеммная
плата находится внутри “Мультичека”.
Для машин, оборудованных системой “Компас-4”:
Контроллер
и клеммная плата расположены внутри блока управления.
Описание контроллера
Контроллер состоит из трех основных плат:
<CPU> - процессорная плата.
Основное назначение: связь
с компьютером, опрос аналоговых датчиков и управление
исполнительными органами (сервовентили и индикаторы), подсчет
пройденного пути, управле- ние и синхронизация работы с платами
<ADC-DAC>, <MUX>.
<ADC – DAC> - аналого-цифровая плата.
Основное назначение: оцифровка
аналогового сигнала с датчиков контрольно- измерительной системы
машины, преобразование цифровой величины в аналоговый сигнал для
управления сервовентилями и индикаторами, контроль режима работы
исполнительных орга- нов, фильтрация и масштабирование входных
сигналов.
<MUX> - коммутаторная плата.
Основное назначение: коммутация
выходных сигналов между штатной системой и АС
“Навигатор”, согласование входных сигналов с контроллером.
При включении контроллера (выключатель под прозрачной крышкой),
осуществляется подключение всех выходных управляющих сигналов к
исполнительным органам с полным от- ключением штатной системы. Входные
сигналы с датчиков для штатной системы не отключа- ются. Это дает
возможность при включенном контроллере производить дополнительный кон-
троль, например одновременная съемка в АС “Навигатор” и “ALC”.
Подключение контроллера к компьютеру осуществляется кабелем связи через
разъем, расположенный в нижней части корпуса. В качестве интерфейса
связи используется промыш- ленный стандарт RS-422, позволяющий управлять
контроллером на расстоянии до 50 м при на- личии наводок и помех, или
RS-232 на расстоянии до 3 м.
На рис.2.12 представлена передняя панель контроллера с изображением
индикаторов и подстроечных элементов.
Светодиодная индикация сигналов:
Плата “CPU”
Питание +5V (логика управления)
Питание +5V (связь)
Начало рихтовки
Начало левой подъемки
Начало правой подъемки
Режим (автоматический или ручной)
Прижим
Сигнал с датчика пути (фаза 0) 9. ----------------------------- (
фаза 1)
Квант пути (в условных единицах)
Направление движения (вперед-назад)
Прием данных от компьютера
Передача данных в компьютер
Тест генератора процессора.
Рис.2.12 Контроллер
Плата “ADC”
Питание +12 V
Питание -12 V
Опуск правого ПРУ
Подъем правого ПРУ
Опуск левого ПРУ
Подъем левого ПРУ
Рихтовка влево
Рихтовка вправо
Плата MUX (коммутация)
Питание +24 V
Индикаторы выходных сигналов (резерв)
«Навигатор»
Подстроечные резисторы на плате “ADC” (цветные
прямоугольники)
R1 Рабочий стрелограф
R2 Контрольный стрелограф
R3 Рабочий маятник
R4 Контрольный маятник
R5 Левая подъемка
R6 Правая подъемка
“Duomatiс 09-32”
R7 Передний маятник
R8 Сателлит
“Unimat 08-275” и ВПРС-03
R7 Занос переднего конца хорды
R8 Занос заднего конца хорды
“ВПРМ-Г”
R5 Профиль
R6 Шаблон
R9, R10 Резерв
R11 Левая переподъемка
R12 Правая переподъемка
Схемы подключения контроллера к штатной системе машин
приведены в Приложении.
Настройка системы
Общие положения
В главном меню АС «Навигатор» клавишами курсора и «Enter» выбрать
функцию
«Настройка».
Функция «Настройка» загружает конфигурацию машины и
настройки из электронной карточки. После чего
происходит тестирование контроллера, кабеля и
протокола обмена между компьютером и контроллером. В
процессе тестирования линии связи определяется
максимально возможная скорость обмена данными. При
успешном тестировании заполняются красным цветом две
горизонтальных линии. Только после этого
активизируется главное меню «Настрой- ка».
ВНИМАНИЕ! Контроллер должен быть подключен к
компьютеру посредством ка- беля связи. Бортовой блок
питания должен быть включен.
«Настройка» – одна из основных функций
автоматизированной системы «Навигатор»,
осуществляющая:
Ввод параметров машины;
Калибровку датчиков положения пути в плане,
продольном профиле и по уровню, а также датчика
пути;
Привязку их показаний к натурным значениям
измеряемых величин;
либровку сервовентилей и индикаторов машины.
Принцип построения программы «Настройка»
базируется на введении понятия «Канал».
«Канал» включает в себя два независимых
подканала: входной (датчик) и выходной
(сервовен- тиль и индикатор). Входной подканал
осуществляет передачу информации с датчика в
виде электрического сигнала, его оцифровку и
преобразование в миллиметры (стрелы изгиба,
уровень, просадки). Выходной осуществляет
обратное действие, т.е. из величин отклонений от
проектных параметров (мм) формируется
электрический сигнал, поступающий на
исполнительные органы (сервовентили и рабочие
индикаторы выправки).
Для машин типа ВПР все каналы объединены в
следующие группы: СТРЕЛОГРАФ, МАЯТНИК, ПРОСАДКА.
В группу СТРЕЛОГРАФ и МАЯТНИК входит РАБОЧИЙ и
КОНТРОЛЬНЫЙ канал. Группа ПРОСАДКА включает
ЛЕВЫЙ и ПРАВЫЙ канал.
Для машин типа Duomatic и Unimat в связи с
наличием дополнительных рабочих органов и
датчиков появляется ряд новых каналов
объединенных в следующие группы:
uomatic 09-32GSM: Группа МАЯТНИК теперь
включает ПЕРЕДНИЙ, РАБОЧИЙ и КОНТРОЛЬНЫЙ
каналы. Кроме того появляется дополнительный
канал САТЕЛЛИТ.
nimat 08-275 3S: ХОРДА и МАЯТНИК. В группу
ХОРДА входит ЗАДНИЙ и ПЕРЕДНИЙ конец хорды.
Группа МАЯТНИК включает РАБОЧИЙ и
КОНТРОЛЬНЫЙ каналы.
Такое разбиение по группам связано с
трехкоординатной постановкой пути в оптимальное
положение. За постановку пути в плане отвечает
группа СТРЕЛОГРАФ и ХОРДА, в поперечном и продольном
профиле – ПРОСАДКА с учетом показаний ПЕРЕДНЕГО и
КОНТРОЛЬНОГО каналов группы МАЯТНИК.
Настройка ВХОДНОГО подканала осуществляется в два
этапа:
создание электронной линейки (датчик);
привязка показаний датчика к натурным измерениям
(поправка);
Создание электронной линейки идет путем измерения напряжения
поступающего с датчи- ка в цифровом виде при установке измерительного
поводка датчика в фиксированные точки
(-300,-200,-100,0,100,200,300 мм) по линейке. В результате строится
таблица соответствия ме- жду напряжением с датчика и миллиметрами по
линейке датчика. В дальнейшем переход от на- пряжения, поступающего с
датчика, к миллиметрам осуществляется по этой переводной табли- це.
После создания электронной линейки требуется привязать показания датчика
к натурным значениям.
В процессе калибровки датчика положение «0» на линейке, установленной на
датчике, выбиралось произвольно, исходя из возможности крепления,
поэтому требуется найти поправку к таблице. Поправка – это разница между
«0» электронной линейки и «0» натурных измерений при данном положении
машины на пути. Имея измерительный инструмент: ручную хорду для плана,
ЦУП для возвышения и ПРП для просадок, находим реальные значения на
пути. Разница между показаниями датчика и натурными значениями в данном
сечении пути определяет по- правку.
Настройка ВЫХОДНОГО потока производится для сервовентиля и индикатора
«Ошибка выправки». Для некоторых каналов могут отсутствовать
сервовентиль или индикатор. Настрой- ка сервовентиля идет на полном
автомате. Индикатор калибруется по шкале на изображении лимба путем
формирования напряжения и установки стрелки в заданное положение.
Настройка позволяет гибко конфигурировать любую измерительную систему
путем за- дания количества датчиков и сервовентилей, а также диапазона
входных и выходных парамет- ров для них (максимум и минимум, линейность,
напряжение питания, скорость нарастания вы- ходного сигнала, полярность
и т.д.) При выборе типа машины система по умолчанию формиру- ет
конфигурацию, поэтому при установке системы необходимо задавать тип
машины.
Вся информация о настройках системы хранится на электронной карточке,
установлен- ной внутри компьютера, поэтому смена программного
обеспечения или компьютера не потре- бует новых настроек.
Настройка системы для машин ВПР
Подготовительные работы
Прежде, чем приступить к настройке системы, необходимо:
Включить необходимые тумблеры на пульте управления
выправкой.
Проверить работоспособность всех измерительных
датчиков (рабочий и контрольный стрелограф, маятник,
датчики просадок).
Установить на датчики измерительные линейки, по
которым будет производиться ка- либровка.
Подготовить рабочий и контрольный стрелографа при
отсутствии измерительной линейки:
встать на прямой участок пути, опустить все
тележки и без бокового прижима на- тянуть
измерительную хорду;
отметить положение хорды на корпусе стрелографа
- это будет «0» мм;
отложить вправо и влево через 100 мм отметки
по линейке (300,200,100) .
Для датчиков просадки убрать стопора и на их
место закрепить линейки, прилагаемые к системе.
Задний рычаг, упирающийся в микровыключатель,
отогнуть так, чтобы ход рычага датчика был в
диапазоне от –40 до 40 мм и работал как стопор
за пределами –40 мм.
Для электронного маятника изготовить два бруска
из металла с размерами: 20x50x100.
При помощи этого бруска будет производиться
калибровка маятника.
Опустить все тележки вместе с маятниковой. Поставить
передние концы пинолей в «0» и отключить разъемы
двигателей перемещения передних концов. Натянуть
нивелировочные тро- сы. При помощи ПРП выставить
нивелировочную систему в “0” в штатном режиме, при
этом измерительный рычаг датчика просадки должен
идти параллельно нивелировочному тросу. Ус- тановить
горизонтально площадку крепления датчика.
Для рабочего и контрольного стрелографа проверить
положение поводков и зазор для троса. Если трос
свободно перемешается внутри зазора более чем на 1
мм, необходимо заме- нить поводок. Нижние
страховочные лыжи отогнуть вниз так, чтобы трос не
выскакивал из по- водка.
На горизонтальном пути хорда должна проходить
посередине между корпусом стрело-
графа и страховочными лыжами.
Штатно настроить измерительную систему машины
под правильное положение датчи-
ков.
Подключить АС «Навигатор» посредством клеммной
платы (или коммуникационных
плат) к штатной системе машины (см. Приложение).
Перед настройкой системы выкрутить подстроечные
резисторы R1-R8 на плате ADC
по часовой стрелке, R9-R12 против часовой.
Для всех датчиков переменными резисторами R1-R8
добиться того чтобы желтый вер- тикальный курсор
на графике не зашкаливал в крайних положениях
датчика, после чего можно приступать к настройке
системы.
Для электронного маятника опустите маятниковую
тележку, предварительно подло- жив под левую
сторону ранее изготовленный брусок высотой 100
мм. Тем же резистором установить желтый курсор
таким образом, чтобы при показаниях +/-100 мм
курсор не зашкали- вал.
Опустить мерное колесо на рельс и сделать мелом
отметку на колесе и головке рельса в точке
соприкосновения. Войти в функцию «Датчик пути» и
нажать «Enter».
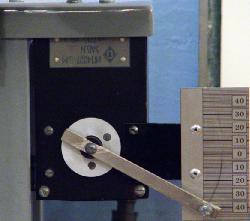
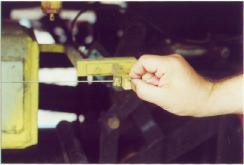
Рис. 3.1 Проверка работоспособности датчика пути
После этого совершить ровно 10 оборотов колеса
вперед, совмещая отметки колеса и рельса. В
окошке «Количество импульсов» должно быть 360.
Отклонение от этого значения не должно превышать
+/-2 импульса. Следующая проверка сводится к
повороту колеса на 5 оборотов назад. Значение
«Количество импульсов» должно быть 180.
Меню программы «Настройка»
Главное Меню программы «Настройка» расположено в левой
части экрана и содержит следующие функции (рис. 3.2.).
Параметры машины,
Рабочий стрелограф,
Контрольный стрелограф,
Уровень,
Левая просадка,
Правая просадка
Контрольный заезд,
КИС (контрольно-измерительная система),
Выход.
Перемещение по меню при помощи клавиш курсора и «Tab».
Активизируемая кнопка меню окрашивается в синий цвет.
Выбор функции по нажатию клавиш «Пробел»
или «Enter».
Рис. 3.2. Главное меню «Настройка»
При выборе функций «Рабочий стрелограф», «Контрольный
стрелограф», «Уровень»,
«Левая просадка», «Правая просадка» система показывает
дополнительное меню (подменю) на- стройки канала.
Подменю расположено справа и имеет следующие функции
(рис. 3.3.).
Рис.3.3. Подменю настройки канала
Датчик,
Поправка,
Сервовентиль,
Индикатор,
Выход.
В подменю, как и в главном меню, действуют такие же
клавиши перемещения и выбора.
В левой части меню «Настроек» и подменю размещены
квадратные «индикаторы готов- ности». Галочка внутри
белого квадрата свидетельствует о том, что все настройки
этого элемента выполнены. В нижней части экрана всегда
есть подсказка.
ВНИМАНИЕ! Если имеется хотя бы один неотмеченный
«индикатор готовности», съемка или выправка будут
недоступны.
Функция «Контрольный заезд» станет доступной после
калибровки всех датчиков.
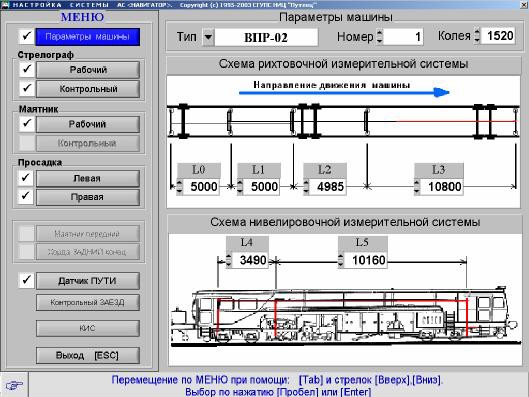
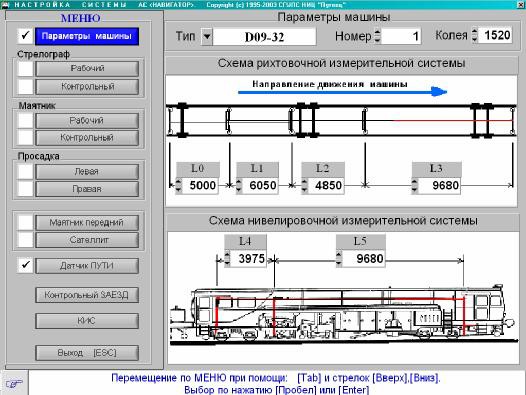
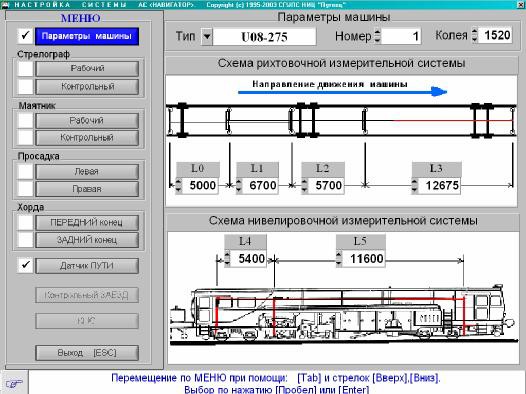
Ввод параметров машины
Функция ввода в память компьютера характеристик путевой
машины, на которую уста- новлена АС.
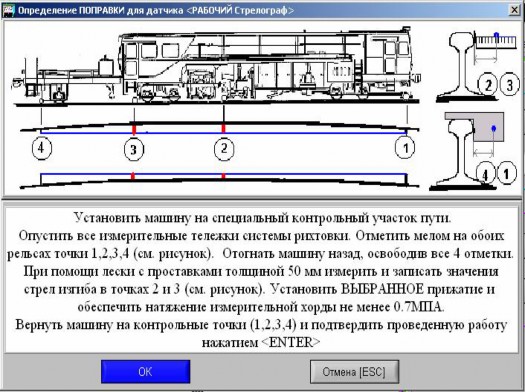
Прежде, чем ввести параметры машины, необходимо измерить
плечи хорд L1,L2,L3,L4 и L5 (см. Рис.3.4.). Для этого
необходимо установить машину на прямой горизонтальный
участок пути, опустить все измерительные тележки и
отметить мелом на головке рельса положение осей колес
передней (4), рабочей (3), контрольной (2) и задней (1)
измерительных тележек по обоим рельсам. А также
положение передней (7) и задней (5) пиноли, и
маятниковой тележки (6).
В скобках указаны порядковые номера точек. Откатить
машину, освободив все отметки, и измерить при помощи
рулетки следующие значения с точностью до миллиметра:
L1пр - расстояние между 1 и 2 точкой по правой нитке,
L1лев - по левой; L2пр, L2лев - между 2 и 3 точками;
L3пр, L3лев - между 3 и 4 точками; L4пр, L4лев - между 5
и 6 точками; L5пр, L5лев - между 6 и 7 точками.
Рис 3.4. Ввод параметров машины
Затем вычислить L1 = (L1пр + L1лев) / 2 и, точно также,
найти L2,L3,L4,L5.
В меню «Настройка» клавишами выбрать
функцию «Параметры машины» и нажать
«Enter».
Становятся доступными функции «тип машины», «номер
машины» и плечи хорд
L1,L2,L3,L4 и L5.
По умолчанию стоят плечи хорды для машины ВПР-02 по
паспорту.
При помощи клавиш курсора или
«Tab» выбирается
нужная функция. Активное окно подкрашено в синий цвет.
Клавишами или
цифровыми клавишами изменяются зна- чения в окошках.
Завершение ввода осуществляется нажатием «Enter» или
.
В нижней части экрана всегда имеется подсказка.
Прежде, чем начать настройку, необходимо задать тип
машины, т.к. в этом случае авто- матически задается
конфигурация под этот тип машины.
ВНИМАНИЕ! Изменение параметра «тип машины» после
выполнения калибро- вок датчиков отменяет эти настройки
и их следует выполнить вновь.
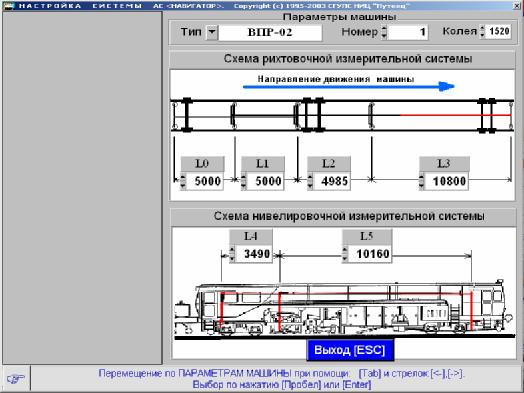
Выход из функции «Параметры машины» по нажатию горячей
клавиши «Esc». Ее
мож- но нажимать в любой момент. Если произошло
изменение параметров, требуется подтвердить правильность
ввода. В случае положительного ответа («Да») новые
параметры будут сохра- нены в памяти. При выборе
«Отмена» («Esc»)
система восстановит предыдущие значения. При нажатии
клавиши «Нет» вы сможете продолжать ввод и
редактирование параметров.
Конфигурация параметров системы
Функция конфигурирования и редактирования настроечных
параметров системы.
ВНИМАНИЕ! Нельзя произвольно изменять параметры, это
может привести к не- работоспособности системы. Все
параметры сохраняются в электронном ключе. Началь- ное
конфигурирование системы осуществляют наладчики. По всем
вопросам конфигури- рования обращайтесь к ним. При
выборе типа машины параметры машины конфигури- руются
автоматически, поэтому любое неосторожное изменение
одного параметра может привести к неправильной работе
системы, а это сразу отразится на пути. Все что описы-
вается ниже, представляет собой дополнительную
информацию о системе.
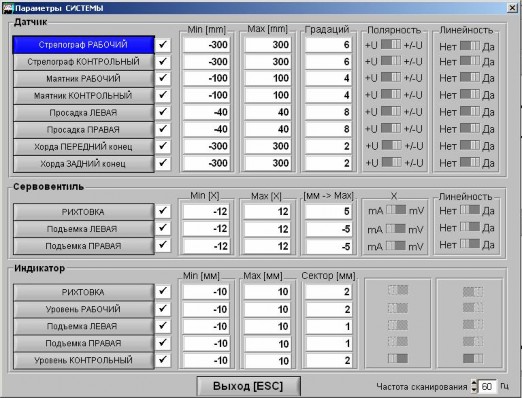
В главном меню «Настройка» нажать F4.
Все информационное поле сгруппировано в три группы:
«Датчик», «Сервовентиль»,
«Индикатор». Внутри каждой группы (левая часть экрана)
размещены кнопки каналов, индика- торы включения ,
цифровые индикаторы и тумблеры (см. Рис.3.5).
Перемещение по экранно- му полю посредством клавиш
курсора.
Активное состояние выбранного элемента экрана: кнопка -
белые буквы на синем фоне
цифровой индикатор - белые цифры на черном фоне тумблер
- зеленый фон.
Включение/выключение индикатора выбранного канала и
тумблера производится по нажатии клавиши «Пробел».
Цифровое значение можно менять, только если активирован
дан- ный элемент.
В правой нижней части экрана находится переключатель
«Частота сканирования», кото- рый позволяет с учетом
требуемой точности получаемой информации выбрать
оптимальную частоту скантрования (опроса) датчиков
контроллером
Выход из «Параметров СИСТЕМЫ» по нажатии «ESC». При этом
необходимо подтвер- дить необходимость сохранения новых
параметров. В случае отказа будут восстановлены пре-
дыдущие значения.
Группа «Датчик» состоит
из следующих подгрупп: «Min[mm]», «Max[mm]», «Града-
ций», «Полярность», «Линейность».
Значения «Min[mm]» и «Max[mm]» (колонка 2 и 3) для
датчика задают диапазон калиб- ровок в миллиметрах.
Величина «Градаций» определяет, по скольким точкам
калибруется дат- чик.
Переключатель «Полярность» устанавливается при выборе
типа машины и информирует о способе питания датчика (+u
- однополярное или +/-u – двух полярное питание).
Изменение этого переключателя приведет к неправильным
показаниям датчика.
ВНИМАНИЕ! Для машин, на которых установлен «Компас»
полярность должна быть +u (необходимо устанавливать
вручную).
Тумблер «Линейность» устанавливает тип интерполяции
передаточной характеристики датчика. Для датчиков
просадки в диапазоне +/- 30 мм линейность соблюдается.
Все остальные датчики линейные. Для штатной системы
машины по умолчанию задается линейная характери- стика.
Рис. 3.5. Редактор настроек системы
Группа «Сервовентиль» состоит
из следующих подгрупп: «Min[X]», «Max[X]», «[mm-
>Max]», «[X]», «Линейность».
Тумблер «[X]» задает типа выходного сигнала на
сервовентиль: mA – токовый или mV -
потенциальный. Для машин типа Duomatic или Unimat
позиция тумблера в положении - mA.
Цифровые значения «Min[X]», «Max[X]» определяют диапазон
выходных сигналов. Диа- пазон не должен превышать +/-15
mA. Для некоторых типов сервовентилей этот диапазон
может составлять +/-12 mA (необходима консультация с
наладчиками).
Величина [ммMax]
определяет величину ошибки выправки в мм, при котором
серво- вентиль полностью открывается. Полярность числа
определяет направление движения ПРУ. По умолчанию заданы
следующие величины: 5 – подъемка , 5 – рихтовка.
Функция «Линейность» определяет характер передаточной
функции сервовентиля.
Группа «Индикатор» состоит
из следующих подгрупп: «Min[mm]», «Max[mm]», «Сек-
тор[mm]».
Значение «Min», «Max» определяют диапазон работы
индикаторов. Значения устанавли- ваются для всех типов
машин +-10 mm (по умолчанию).
Величина «Сектор[mm]» задает диапазон красного сектора
на индикаторе. Для индикато- ров просадки он должен быть
1 мм. Все остальные 2 мм.
ВНИМАНИЕ! Значение диапазона красного сектора не
совпадает с принятыми в штатной системе. В штатной
системе для подъемок 0.5 мм, для других индикаторов 1.5
мм.
Калибровка датчиков и создание электронных линеек
Функция «Датчик» в подменю позволяет калибровать датчик
по фиксированным значе- ниям на линейке и формировать
переводную таблицу (напряжение - миллиметры) т.е. созда-
вать электронную линейку для выбранного датчика.
При помощи клавиш курсора в
главном меню «Настройка» выбрать кнопку нуж- ного канала
и подтвердить выбор «Enter».
Далее в подменю курсорами выбрать
функ- цию «Датчик» и нажать «Enter».
На рис.3.6. представлена экранная форма настройки
датчика «Рабочий стрелографа». На графике по оси Х
откладываются напряжение в кодах АЦП (Аналогово-Цифровой
Преобразо- ватель), а по Y - показания линейки в мм.
Внизу графика приведена линейка, на которой крас- ный
указатель показывает, в какое положение поставить
бегунок. Для датчика «Уровень» вме- сто линейки
изображена шкала стрелочного маятника. С левой и правой
стороны расположены линейки для датчиков просадок,
соответственно.
Датчик «Стрелограф». Отрицательные
значения для стрелографов находятся с левой стороны по
направлению движения.
{ EMBED
Word.Picture.8 }
Рис.3.6. Калибровка датчика «Рабочий стрелограф»
Установить на датчике поводок в положение, показанное в
желтом окошке (рис. 3.6.), и нажать «Enter». По
мере ввода новых положений поводка на графике,
соответственно, будут располагаться красные точки. После
полного прохождения ряда значений (-300,-200,-
100,0,100,200,300 мм) на графике будет построена
интерполирующая линия. Калибровка кон- трольного
стрелографа выполняется аналогично.
Рис.3.7
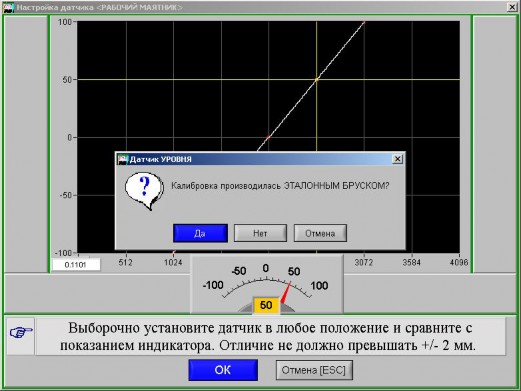
Датчик «Уровень». Калибровка
датчика производится по 5 точкам (-100,-50,0,50,100). В
параметрах системы у датчиков «Маятник» должно быть
«Min» = -100, «Max» = 100,
«Градаций» = 4.
Значению –100 мм соответствует брусок высотой 100 мм,
установленный слева по ходу движения машины. Для
настройки следует опустить тележку и подтвердить
нажатием клавиши
«Enter».
Дальше поставить 50 мм и нажать «Enter».
Опустить тележку без бруска – 0 мм и
«Enter».
После этого подкладываем брусок с правой стороны 50 и
100 мм.
После того, как пройдены все фиксированные точки и
построена интерполирующая ли- ния, на вопрос об
эталонном бруске дать положительный ответ.
Рис.3.8. Калибровка датчика уровня
Датчик «Просадка». Калибровка
датчиков просадок идет снизу вверх по линейке, уста-
новленной на датчике в диапазоне от –40 до 40 мм
(рис.3.9).
Установить на датчике штангу в положение, показанное в
желтом окошке, и нажать
«Enter».
По мере ввода новых положений штанги на графике,
соответственно, будут распола- гаться красные точки.
После полного прохождения ряда значений
(-40,-30,-20,-10,0,10,20,30,40 мм) на графике будет
построена интерполирующая линия.
ВНИМАНИЕ! Если точки располага- ются нелинейно, и в
левом нижнем углу лю- бого графика в черном окошке
значение превышает 8, необходимо повторить калиб- ровку.
Если повтор ничего не дает, следует проверить датчик.
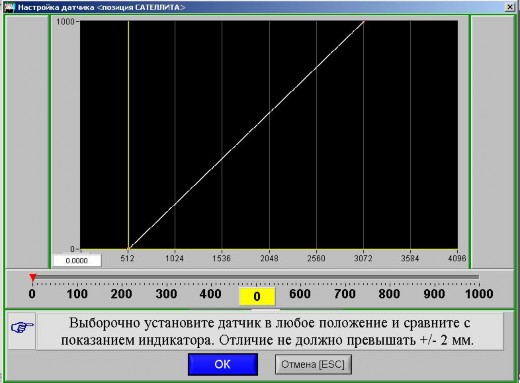
Теперь, когда создана электронная ли- нейка, ее
необходимо проверить. Проверка осуществляется по трем
величинам: “0” , ми- нимальное и максимальное значение
из ряда калибровок. Отклонение не должно превышать
+/-2 мм. Если проверка прошла успешно, на- жмите «Enter», в
противном случае - «Esc»,
то- гда новая калибровка не будет сохранена.
Рис.3.9
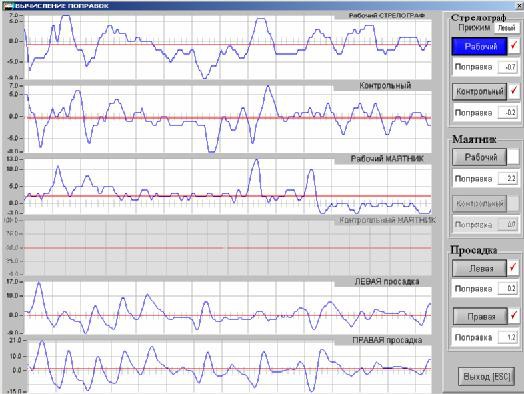
Ввод поправок и привязка показаний датчиков к натурным
измерениям
Функция привязки электронной линейки к измеренным
натурным значениям путем вы- числения поправки к
переводной таблице. Поправка есть разница между
показаниями элек- тронной линейки и результатом
инструментальных промерои для данного сечения пути.
При помощи клавиш курсора в
главном меню «Настройка» выбрать функцию ка- либруемого
канала и подтвердить выбор «Enter». Далее
в подменю курсорами выбрать
функцию «Поправка» и нажать «Enter».
Для «Рабочего» и «Контрольного» стрелографа определяются
две поправки к электрон- ной линейке, связанные с
возможностью прижима, как к левому, так и к правому
рельсу.
Все остальные датчики имеют одну поправку. При входе в
функцию «Поправка» для рабочего и контрольного
стрелографа клавишами курсора выбрать
тип прижатия и на- жать «Enter».
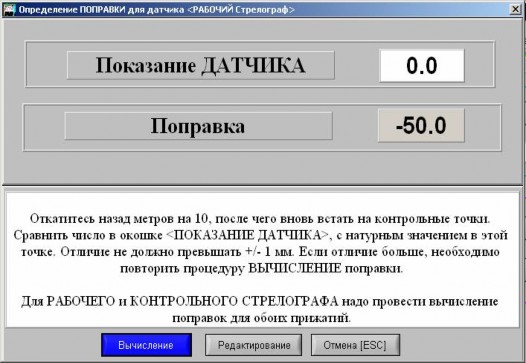
Становятся доступными функции «Вычисление»,
«Редактирование» и «Выход [Esc]».
Рис. 3.10. Меню функции «Поправка»
Перемещение по кнопкам функций клавишами и
выбор нажатием «Enter»(
рис.3.10).
«Вычисление» - вычисление поправки как разница между
показаниями электронной ли- нейки и инструментальными
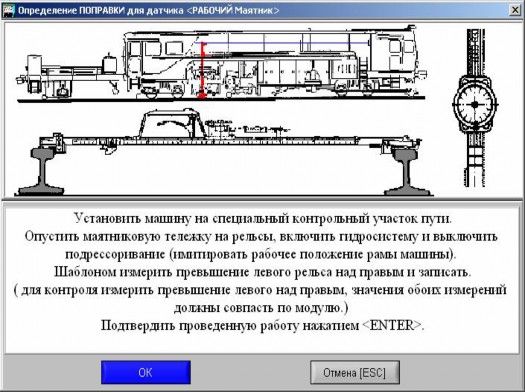
измерениями на пути. На рис. 3.12-3.14 даны подробные
рекомен- дации по измерению натурных значений в плане,
по уровню и в профиле. Нажатием «Enter» подтвердите
проведенную работу. В черном активном окошке вам
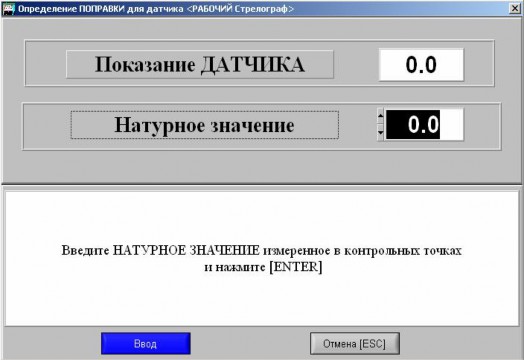
необходимо ввести измерен- ные значения.
ВНИМАНИЕ! Вы вводите не поправку, а натурное значение,
т.е. то значение, кото- рое увидели на линейке.
Компьютер сам вычисляет поправку в зависимости от типа
дат- чика и прижима.
Для рабочего и контрольного стрелографа поправки
вычисляются в два заезда. В пер- вый заезд необходимо
включить левый прижим и накатиться, точно установив
машину на сде- ланные отметки. После чего требуется
вычислить поправку с левым прижимом для рабочего и
контрольного стрелографа. Для этого в черном активном
окошке необходимо ввести измерен- ные значения.
Далее откатиться назад не менее 5 метров и включить
правый прижим.
Рис. 3.11 Ввод натурных значений
Накатиться только движением машины вперед с точной
постановкой машины на отметки и вычислить правую
поправку для стрелографов. Ввод натурных значений
измеряемых величин для остальных датчиков выполняется
аналогично.
Для нахождения поправки уровня необходимо учитывать
правило знаков: при
повороте вправо (левый рельс выше) - положительное
возвышение. В другом случае возвышение имеет
отрицательное значение. Это важное условие при вводе
натурного значения уровня.
Рис.3.12 Инструментальный промер в плане
Рис. 3.10. Инструментальный промер уровня
Рис. 3.11. Инструментальный промер просадки
Рис. 3.13 Инструментальный промер уровня
Рис.3.14 Инструментальный промер просадки
Для ввода поправок просадок при помощи ПРП на нулевом
тупике подкладками под те- лежки нивелировочной системы
выставляются левая и правая просадки в «0».В качестве
на- турного значения вводится 0 мм для обоих датчиков.
Функция «Редактирование» позволяет подкорректировать
поправку в процессе работы АС. По результатам
предварительных заездов по прямому участку пути в
ПРОСМОТРЕ можно определить ошибку к поправке и
отредактировать ее.
Настройка и проверка сервовентилей
ВНИМАНИЕ! Первым этапом должна быть произведена
настройка механического
«0» сервовентиля. Задатчики переподъемки должны быть
установлены в положение «0».
Функция настройки сервовентиля строит переходную таблицу
между «ошибкой выправки» (мм) и выходным током на
сервовентиль (ma).
Не все каналы имеют сервовентиль. Ниже дано соответствие
между каналом и сервовенти-
лем:
«Рабочий стрелограф» - сервовентиль рихтовки,
«Левая просадка» - сервовентиль левой подъемки,
«Правая просадка» - сервовентиль правой подъемки.
Перед настройкой сервовентилей необходимо:
включить тумблеры на блоке управления:
рихтовка - "автомат";
подъемка - "автомат";
установить прижим;
натянуть хорду;
опустить ПРУ.
При помощи клавиш курсора в
главном меню «Настройка» выбрать кнопку нужного канала и
подтвердить выбор «Enter».
Далее в подменю курсорами выбрать
функцию
«Сервовентиль», нажать педаль опуска блоков и
подтвердить выбор клавишей «Enter».
ВНИМАНИЕ! При нажатой педали и включенных тумблерах на
плате CPU должны загораться светодиоды "Начало
рихтовки", "Начало левой подъемки" и "Начало правой
подъемки" (см. п. "Описание контроллера").
Настройка сервовентиля идет на полном автомате. На
экране вы увидите пробегающую на- клонную белую полосу
слева до середины и справа до середины. При нажатой
педали опуска блоков на индикаторах, соответствующих
данному сервовентилю, стрелка должна повторять тоже
движение слева до середины и справа до середины.
ВНИМАНИЕ! В случае изображения на графике вертикальной
линии, необходимо проверить кабель и монтажное
соединение в схеме блока на короткое замыкание. Если
график рисуется наклонной линией, а стрелка индикатора
не двигается, необходимо убедиться, все ли тумблеры
включены, а также проверить весь монтаж на целостность.
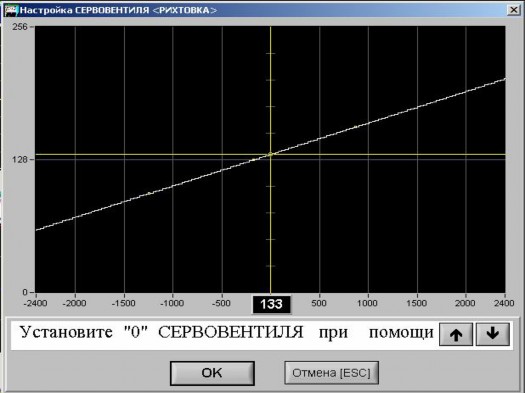
После того, как система настроила сервовентиль, вам
необходимо при помощи клавиш
при
нажатой педали, установить «0» сервовентиля по прибору и
нажать «Enter» (рис.
3.15).
Для сервовентиля рихтовки поднять ПРУ и добиться
остановки ПРУ в горизонтальном по- ложении при нажатии
педали опуска блоков. Все это, конечно, теоретически
верно, но на практике видно, что при «0» токе на
сервовентиле рихтовки ПРУ разъезжается в обе стороны и
поймать «0» очень сложно. Поэтому «0» сервовентиля лучше
находить на мягком балласте в тупике. Только в этом
случае можно более или менее точно поставить «0»
сервовентиля.
Для сервовентиля подъемки опустить ПРУ на рельсы при
нажатии педали опуска блоков и добиться остановки ПРУ в
вертикальном положении, при этом потребуется опустить
ПРУ, если оно поднялось. При правильной настройке ПРУ
останется в этом положении.
ВНИМАНИЕ! Ток «0» сервовентиля не должен превышать +/- 3
mа. Если будет больше, следует заменить сервовентиль.
При первой настройке сервовентиля достаточно установить
стрелку индикатора тока сер- вовентиля в «0». Процесс
выправки покажет, как сервовентили ведут себя в работе.
Если вы увидите, что путь уводит в ручном режиме, только
тогда имеет смысл найти настоящий «0» сервовентиля.
Рис. 3.15 Настройка и установка «0» сервовентиля
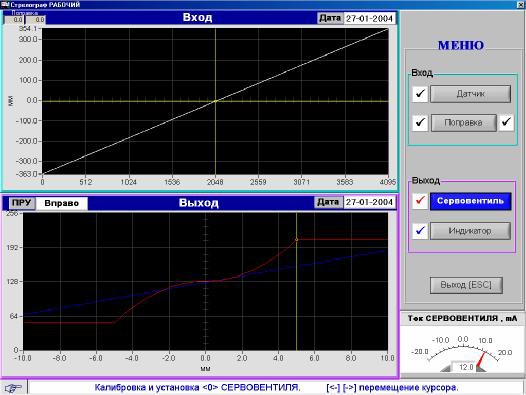
Рис.3.16 Проверка сервовентиля и индикатора
После возврата в подменю, рядом с кнопкой
«Сервовентиль», появится индикатор .
Следующий этап – проверка.
На графике «Выход» красным цветом будет отрисована
передаточная функция сервовен- тиля (мм ma).
При помощи клавиш курсора горизонтально
перемещается желтый вертикальный курсор. По оси Х
отложена шкала “Ошибка выправки” (мм) (рис. 3.16).
Установите желтый курсор на значение –10 мм и нажмите
левую педаль. Ток
сервовен- тиля должен быть не менее 12 ma.
Теперь необходимо проверить направление движения ПРУ. В
левом верхнем углу графи- ка «Выход» в окошке Вы
увидите, в какую сторону должно двигаться ПРУ.
В случае несовпадения, необходимо поменять знак на
противоположный у скорости на- растания сервовентиля в
таблице «Параметры системы», вызываемой нажатием
клавиши F4,
и повторить настройку сервовентиля.
Настройка индикаторов
Функция настройки индикатора строит переходную таблицу
между «ошибкой выправки» (мм) и выходным напряжением на
индикатор (mv).
Не все каналы имеют индикатор. Ниже дано соответствие
между каналом и индикатором:
«Рабочий стрелограф» - индикатор ошибки
рихтовки,
«Рабочий маятник» - индикатор ошибки рабочего
уровня,
«Контрольный маятник» - индикатор недоработок по
контрольному уровню,
«Левая просадка» - индикатор ошибки левой
подъемки,
«Правая просадка» - индикатор ошибки правой
подъемки,
При помощи клавиш курсора в
главном меню «Настройка» выбрать кнопку нужно- го канала
и подтвердить выбор «Enter».
Далее в подменю курсорами выбрать
функцию
«Индикатор» и нажать «Enter».
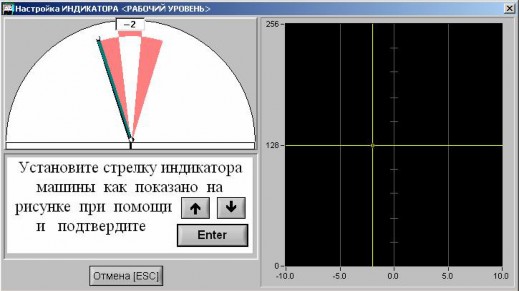
Рис.3.17 Настройка индикатора
Настройка индикатора производится по трем значениям:.
-2,0,2 мм (рис. 3.17). Для индика- торов просадки
диапазон красного сектора на индикаторе в отличие от
остальных должен быть 1 мм. При помощи клавиш курсора установить
стрелку на рабочем индикаторе машины в положение,
указанное на рисунке, и подтвердить нажатием «Enter».
Для стрелочных индикаторов нет никаких особенностей.
Случай со светодиодным индикатором следует разобрать
подробно. Каждый светодиод отражает отклонение на 1 мм,
поэтому для установки первого значения –2мм, нажимается
кур- сор до
тех пор, пока не вспыхнет 2-ой светодиод слева от
середины ( -----@@ ! ----------). Подтвердить установку
нажатием «Enter».
Следующее значение 0 мм устанавливается следующим
образом. Клавишей необхо-
димо дойти до такого порога, когда погаснут все
светодиоды и после этого подсчитывается на- жатие этой
клавиши вверх. Подсчет вести до тех пор, пока не
вспыхнет первый светодиод спра- ва от середины и шаг
назад. Полученное значение нажатий разделить пополам и
столько раз нажать .
Установленную позицию ( --------0 ! 0---------)
подтвердить «Enter».
Для значения 2 мм нажимается клавиша ,
пока не вспыхнет 2-ой справа от середины светодиод. (
--------- ! @@------) Подтвердить установку «Enter».
После возврата в подменю рядом с кнопкой «Индикатор»
появится .
На графике “Выход” синим цветом будет отрисована
переходная характеристика для ин- дикатора. При помощи
клавиш ,
перемещая желтый курсор, проверяется правильность
установки стрелки рабочего индикатора машины выбранного
канала.
Калибровка датчика пути
Функция подсчета количества импульсов от датчика пути
при проходе мерного колеса по участку пути известной
длины. На основании этих данных вычисляется расстояние
на пути между двумя импульсами с точностью до микрона.
Прежде, чем начать калибровку, требуется убедиться в
работоспособности датчика пути. При помощи клавиш
курсора в
главном меню «Настройка» выбрать «Датчик пути»
и подтвердить выбор «Enter».
Следуйте всем рекомендациям, приведенным в
информационном окне (рис. 3.18). Стар- товую позицию
лучше всего помечать по оси колеса контрольной тележки.
Старт по нажатию
«Enter» или «Пробел». В
процессе заезда внимательно следите за показанием
«Количество импульсов», при этом, цифры должны изменятся
равномерно. Если заметите задержку, следует остановиться
и устранить причину. Чаще всего, это грязь и камни,
попавшие под колесо, кото- рые тормозят вращение.
Рис. 3.18 Калибровка датчика пути.
Финиш фиксируется по нажатию «Enter» или «Пробел».
В активном окошке «Длина пути» ввести длину пройденного
пути в миллиметрах и «Enter». Оптимальная
длина 100 м.
Проверка осуществляется вторым заездом, при этом разница
между значениями «Коли- чество импульсов» для двух
проходов не должна превышать 5 импульсов. Если отличие
составляет более 5 импульсов, повторите калибровку.
ВНИМАНИЕ! Поддерживайте в чистоте и целостности
резиновое покрытие колеса и обеспечивайте надежный
прижим к рельсу, от этого зависит точность измерения
пройден- ного пути.
Контрольный заезд
После калибровки всех датчиков становятся доступными
функции «Контрольный заезд» и
«КИС».
Функция «Контрольный заезд» находит поправки к
электронным линейкам по результа- там съемки прямого
участка пути длиной не менее 100 м. «Контрольный заезд»
будет доступен в главном меню «Настройка» только при
полной калибровке все датчиков.
При помощи клавиш курсора в
главном меню «Настройка» выбрать «Контрольный заезд» и
подтвердить выбор «Enter».
Заездов необходимо сделать два – с левым и правым
прижатием тележек. Перед съемкой пути выбирается тип
прижатия при помощи клавиш курсора и «Enter». Машину
привести в рабочее состояние и проверить
работоспособность всех датчиков.
Старт по нажатию «Enter» или «Пробел».
Конец съемки по «Esc». При
этом на запрос о сохранении данных съемки необходимо от-
ветить «Да». Только в этом случае появляется возможность
просмотра и редактирования поправок в графическом виде.
На рис.3.19 представлена экранная форма функции
«Вычисление поправок». Перемеще- ние по меню редактора
при помощи клавиш .
Нажатием «Пробел» можно
включить или выключить индикатор поправки .
Если установлен индикатор для данного датчика, то при
выходе из редактора будет сохранено его новое значение
поправки.
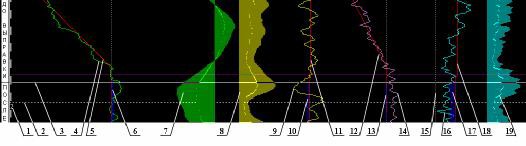
3.19 Графический редактор поправок.
На графиках синим цветом отрисованы натурные значения
снятого участка пути. Крас- ные линии показывают среднее
значение на всем участке для каждого датчика.
На прямом участке натурные стрелы для плана и профиля
будут располагаться вблизи постоянной составляющей,
которая и является поправкой к электронной линейке с
обратным знаком (рис 3.19).
ВНИМАНИЕ! Для уровня это может не работать, т.к. чаще
всего на прямых уст- раивают возвышение бровочной нити.
Поэтому по умолчанию индикатор уровня выклю- чен.
Поправка для уровня находится инструментальным промером
при помощи ЦУП.
Выберите в представленном справа меню датчик, для
которого вы хотите подредактиро- вать поправку, и
нажмите «Enter». При
помощи клавиш курсора или
цифрами можно из- менить значение поправки. Выход из
функции редактора по «Esc».
Выход из функции «Вычисление поправок» и возврат в
главное меню «Настройка» по горячей клавише «Esc».
При положительном ответе на запрос о достоверности
полученных поправок система установит новые поправки.
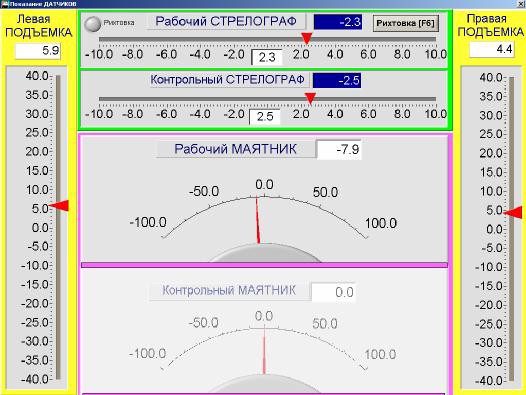
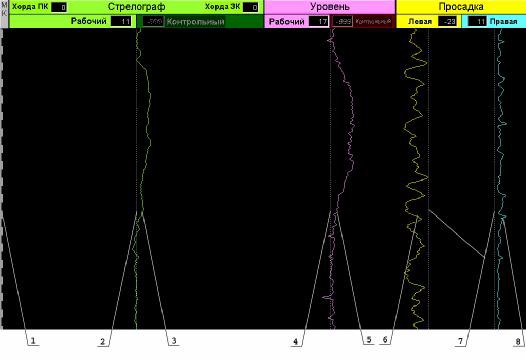
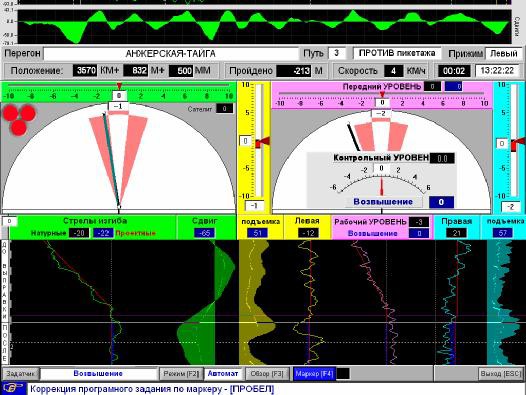
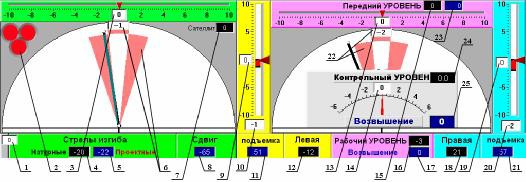
Функция «КИС» выводит на экран компьютера показания всех
датчиков контрольно- измерительной системы (рис.3.20) и
позволяет оценить их работоспособность.
Рис.3.20 Экранная форма функции «КИС»
Выход из программы «Настройка»
Выход из программы «Настройка» по горячей клавише «Esc» или
при выборе кнопки
«Выход» в главном меню. При положительном ответе на запрос о сохранении
новых настроек данные будут записаны в электронную карточку.
Настройка системы для машин Duomatic
Подготовительные работы
Прежде чем приступить к настройке системы необходимо:
Включить все необходимые тумблеры на пульте управления
выправкой.
Проверить работоспособность всех измерительных датчиков
(рабочий и контрольный стрелограф, маятник, датчики
просадок).
Установить на датчики измерительные линейки, по которым
будет производиться калиб- ровка.
Для электронного маятника изготовить два бруска из
металла с размерами: 20x50x100. При помощи этого бруска
будет производиться калибровка маятника.
Опустить все тележки вместе с маятниковой. Натянуть
нивелировочные тросы. При помощи ПРП выставить
нивелировочную систему в “0” в штатном режиме, при этом
измеритель- ный рычаг датчика просадки должен идти
параллельно нивелировочному тросу. Установить
горизонтально площадку крепления датчика.
Для рабочего и контрольного стрелографа проверить
поводки и зазор для троса. Если трос свободно
перемешается внутри зазора более чем на 1 мм, необходимо
заменить поводок. Нижние страховочные лыжи отогнуть вниз
так, чтобы трос не выскакивал из поводка. На
горизонтальном пути хорда должна проходить посередине
между корпусом стрелографа и страховочными лыжами.
Штатно настроить измерительную систему машины под
правильное положение датчиков. Подключить АС «Навигатор»
посредством клеммной платы к штатной системе (см.
Приложение).
Перед настройкой системы выкрутить все подстроечные
резисторы на плате ADC против часовой стрелки. Для
машин, оборудованных системой «Компас-4», резисторы
R1-R8 должны быть выкручены по часовой стрелке, R9-R12
против часовой стрелки. Для всех датчиков переменными
резисторами R1-R8 добиться того, чтобы желтый
вертикальный курсор на графике не зашкаливал в крайних
положениях датчика, после чего можно приступать к
настройке.
Привести мерное колесо в рабочее состояние и сделать
мелом отметку на колесе и головке рельса в точке
соприкосновения. Войти в функцию “Датчик пути” и нажать
“Enter”. После этого совершить ровно 10 оборотов колеса
вперед, совмещая отметки колеса и рельса. Число в окне
“Количество импульсов” должно примерно соответствовать
270. Отклонение от этого значения не должно превышать
+/-2 импульса. Следующая проверка сводится к повороту
колеса на 5 оборотов назад. Значение “Количество
импульсов” должно быть 135.
Меню программы настройка
Отличительной особенностью рассматриваемых машин является
наличие дополнитель- ных рабочих органов и датчиков:
сателлит, передний и контрольный (задний) маятники;
Главное меню программы "Настройка" теперь содержит следующие
функции для машин типа Duomatic 09-32 CSM:
Параметры машины
Рабочий стрелограф
Контрольный стрелограф
Рабочий маятник
Контрольный маятник
Левая просадка
Правая просадка
Передний маятник
Сателлит
Контрольный заезд
КИС (контрольно-измерительная система)
Выход
Рис.3.21 Главное меню настройки для Duomatic
Конфигурация параметров системы
Функция конфигурирования и редактирования параметров системы
для машин Duomatic
имеет вид
Рис.3.21 Редактор параметров системы
Внимание! Для машин типа Duomatic 09-32, оборудованных
системой «Компас-4», переключатель «Полярность» должен
соответствовать однополярному питанию датчи- ков.
Калибровка датчиков и создание электронных линеек
Калибровка датчика «положения сателлита» производиться по
двум точкам 0 и 1000 мм. В параметрах системы у датчика
сателлит должно быть «Min» = 0 «Max» = 1000 «Градаций» = 1.
Сателлит устанавливается в режим съемки, что соответствует
нулевому положению датчика.
Рис.3.22 Рис.3.23
Подтвердить установку сателлита в 0 мм нажатием «Enter».
После чего, не перемещая са- теллит, с помощью крайнего
фиксатора тросик освобождается так, чтобы он мог свободно
задвигаться в "улитку" (рис.3.22). Для получения следующего
фиксированного значения необходимо завести тросик внутрь
улитки на величину 1000 мм, используя рулетку (рис.3.23), и
нажать "Enter".
В результате на графике будет построена интерполирующая
линия (рис.3.24).
Рис.3.24 Калибровка датчика «Положение сателлита»
Ввод поправок и привязка датчиков к натурным измерениям
Поправка для датчика «положения сателлита» всегда будет
равна 0, т.к. 0 мм датчика всегда соответствует нулевому
положению сателлита. Необходимо после калибровки датчика
войти в функцию «Поправка» и выбрать «Редактирование».
Ввести 0 и подтвердить «Enter».
Нахождение поправок для переднего и контрольного маятника
полностью соответствует примеру с рабочим маятником.
Ввод натурных значений производится с точностью до 0.1 мм.
Калибровка задатчиков «Переподъемка»
Перед калибровкой задатчиков "переподъемки" необходимо зайти в меню
"Настройка", выбрать соответствующий задатчик по левому или правому
рельсу ("Просадка левая" или "Просадка правая") и установить курсор на
пункт "Сервовентиль". После чего с помощью кур- сора дать
максимальный ток на опуск (рис.3.25), а задатчиком штатной системы - на
подъ- ем, и нажать педаль опуска подбивочных блоков.
Далее необходимо вращать подстроечный резистор R11 (для левого
задатчика) и R12 (для правого задатчика) по часовой стрелке до получения
значения близкого к "0" в окне "Ток сервовентиля".
ВНИМАНИЕ! Настройка задатчиков "Переподъемка" ведется только после пол-
ной настройки сервовентилей.
Прежде чем приступить к настройке системы необходимо:
Включить необходимые тумблеры на пульте управления
выправкой.
Проверить работоспособность всех измерительных датчиков
(рабочий и контрольный стрелограф, маятник, датчики
просадок).
Установить на датчики измерительные линейки, по которым
будет производиться калиб- ровка.
Для электронного маятника изготовить два бруска из
металла с размерами: 20x50x100.
При помощи этого бруска будет производиться калибровка
маятника.
Опустить все тележки вместе с маятниковой. Натянуть
нивелировочные тросы. При помощи ПРП выставить
нивелировочную систему в “0” в штатном режиме, при этом
измери- тельный рычаг датчика просадки должен идти
параллельно нивелировочному тросу. Установить
горизонтально площадку крепления датчика.
Для рабочего и контрольного стрелографа проверить
поводки и зазор для троса. Если трос свободно
перемешается внутри зазора более чем на 1 мм, необходимо
заменить поводок. Нижние страховочные лыжи отогнуть вниз
так, чтобы трос не выскакивал из поводка. На
горизонталь- ном пути хорда должна проходить посередине
между корпусом стрелографа и страховочными лыжами.
Отключить разъемы двигателей перемещения передних
концов.
Штатно настроить измерительную систему машины под
правильное положение датчиков. Подключить АС «Навигатор»
посредством клеммной платы к штатной системе
(Приложение).
Перед настройкой системы выкрутить все подстроечные
резисторы на плате ADC против часовой стрелки. Для
машин, оборудованных системой «Компас-4», резисторы
R1-R8 должны быть выкручены по часовой стрелке, R9-R12
против часовой. Для всех датчиков переменными
резисторами R1-R8 добиться того, чтобы желтый
вертикальный курсор на графике не зашкали- вал в крайних
положениях датчика, после чего можно приступать к
настройке.
Привести мерное колесо в рабочее состояние и сделать
мелом отметку на колесе и голов- ке рельса в точке
соприкосновения. Войти в функцию “Датчик пути” и нажать
“Enter”. После этого совершить ровно 10 оборотов колеса
вперед, совмещая отметки колеса и рельса. В окошке
“Количество импульсов” должно быть около 270. Отклонение
от этого значения не должно превышать +/-2 импульса.
Следующая проверка сводится к повороту колеса на 5
оборотов назад. Значение “Количество импульсов” должно
быть 135.
Меню программы настройка
Главное меню программы "Настройка" содержит следующие
функции для машин типа
Unimat 08-275 3S:
Параметры машины
Рабочий стрелограф
Контрольный стрелограф
Рабочий маятник
Контрольный маятник
Левая просадка
Правая просадка
Передний конец хорды
Задний конец хорды
Контрольный заезд
КИС (контрольно-измерительная система)
Выход
Перемещение по меню при помощи клавиш курсора и «Tab».
Активизируемая кнопка меню окрашивается в синий цвет. Выбор
функции по нажатию клавиш «Пробел»
или «Enter».
Рис.3.26 Главное меню настройки для Unimat
Конфигурация параметров системы
Функция конфигурирования и редактирования параметров системы
для машин типа
Unimat имеет вид
Рис.3.27 Редактор параметров системы
ВНИМАНИЕ! Для машин типа Unimat 08-275 3S, оборудованных
системой «Компас- 4», переключатель «Полярность» должен
соответствовать однополярному питанию датчиков.
Калибровка датчиков и создание электронных линеек
Калибровка датчика «положение переднего конца хорды»
производится по двум точ- кам –300 и +300 мм (правило знаков
такое же, как для стрелографа). В параметрах системы у
датчика «ХОРДА ПЕРЕДНИЙ и ЗАДНИЙ конец» должно быть «Min» =
-300, «Max»
= 300, «Градаций» = 2. От среднего положения, откладывается
влево и вправо по 300 мм, и делаются отметки. Положение -300
мм соответствует смещению троса влево по ходу машины вперед.
После чего в рабочей кабине блокируются оба конца хорды, и
выполняется калибровка датчика, начиная с левой стороны по
направлению движения (рис.3.28). Настройка датчика
«положение заднего конца хорды» выполняется аналогично.
Рис.3.28 Калибровка датчика «Передний конец хорды»
Ввод поправок и привязка датчиков к натурным измерениям
Поправка для датчиков «положение переднего и заднего конца
хорды» всегда будет равна 0, т.к. 0 мм датчика всегда
соответствует нулевому положению хорды. Необходимо после
калибровки датчика установить поводок в нулевое положение,
войти в функцию «Поправка» и выбрать «Редактирование».
Ввести 0 и подтвердить «Enter».
Настройка системы для машин ВПРМ-Г
Подготовительные работы
Прежде чем приступить к настройке системы необходимо:
Включить все необходимые тумблеры на выносном пульте
управления выправкой.
Проверить работоспособность всех измерительных датчиков
(рабочий стрелограф, маятник, профиль и шаблон).
Установить на датчики измерительные линейки, по которым
будет производиться калибров- ка.
Для электронного маятника изготовить два бруска из
металла с размерами: 20x50x100. При помощи этого бруска
будет производиться калибровка маятника.
Опустить все тележки. Натянуть измерительную хорду.
Примечание: При калибровке датчика «Шаблон» необходимо
поднять измерительную те- лежку и включить распор.
Для рабочего стрелографа проверить поводок и зазор вилки
для троса. Если трос свободно перемешается внутри вилки
более чем на 1 мм, необходимо ослабить два стопорных
болта и сдвинуть вилку до устранения зазора в
соответствии с диаметром троса.
Подключить разъем 2РМ18 КПН7 к стрелографу.
Перед настройкой системы выкрутить все подстроечные
резисторы на плате ADC против часовой стрелки. Для всех
датчиков («Рабочий стрелограф», «Рабочий маятник», «Кон-
трольный маятник», «Профиль», «Шаблон») переменными
резисторами контроллера R1, R3- R6 добиться того, чтобы
желтый вертикальный курсор на графике настройки не
зашкаливал в крайних положениях, при этом необходимо
учитывать, что курсор должен перемещаться по графику
плавно и равномерно, после чего можно приступать к
настройке.
Меню программы «Настройка»
Главное Меню программы «Настройка» расположено в левой части
экрана и содержит сле- дующие функции (рис. 3.28).
Параметры машины,
Рабочий стрелограф,
Рабочий маятник,
Контрольный маятник,
Профиль,
Шаблон,
Контрольный заезд,
Выход.
Перемещение по меню при помощи клавиш курсора и «Tab».
Активизируемая кнопка меню окрашивается в синий цвет. Выбор
функции по нажатию клавиш «Пробел»
или «Enter».
При выборе функций «Рабочий стрелограф», «Рабочий маятник»,
«Контрольный маятник»,
«Профиль», «Шаблон» система показывает дополнительное меню
(подменю) настройки канала. Подменю расположено справа и
имеет следующие функции
Датчик,
Поправка,
Выход.
В подменю, как и в главном меню, действуют такие же клавиши
перемещения и выбора. В левой части меню «Настроек» и
подменю размещены квадратные «индикаторы готов-
ности». Галочка внутри
белого квадрата свидетельствует о том, что все настройки
этого эле- мента выполнены. В нижней части экрана всегда
есть подсказка.
Рис.3.29 Главное меню настройки для ВПРМ-Г
ВНИМАНИЕ! Если имеется хотя бы один неотмеченный «индикатор
готовности», съемка или выправка будут недоступны.
Функция «Контрольный заезд» станет доступной после
калибровки всех датчиков. Кон- трольный заезд для машины
ВПРМ-Г выполняется только с одним прижимом.
Ввод параметров машины
При вводе в память компьютера характеристик путевой машины
ВПРМ-Г следует учиты- вать ее некоторые конструктивные
особенности, в связи с которыми, величина плечей рихтовоч-
ной и нивелировочной измерительных систем равны (рис. 3.29),
т.е.
L3 = L5, L4 = L1+L2, при этом L1=L2 (1)
Поэтому прежде чем ввести параметры машины, необходимо
определить плечи измери- тельной системы. Для этого следует
установить машину на прямой горизонтальный участок пути и,
опустив все тележки, отметить положение осей колес передней,
рабочей и задней тележек по обоим рельсам. Откатить машину,
освободив все отметки, и измерить при помощи рулетки с
точностью до миллиметра следующие значения:
L4пр - расстояние по правой нитке, L4лев - по левой; L5пр,
L5лев;
Затем вычислить L4 = (L4пр+ L4лев)/2 и по аналогии величину
L5.
В меню «Настройка» выбрать функцию «Параметры машины», после
чего ввести «тип машины», «номер машины», «ширину колеи» и
измеренные плечи хорд с учетом равенства (1).
ВНИМАНИЕ! Изменение параметра «тип машины» после выполнения
калибровок датчиков отменяет эти настройки и их следует
выполнить вновь.
Выход из функции «Параметры машины» по нажатию горячей
клавиши «Esc».
Конфигурация параметров системы
Функция конфигурирования и редактирования параметров системы
для машин ВПРМ-Г имеет вид
Рис. 3.30 Редактор параметров системы
Калибровка датчиков и создание электронных линеек
Датчик «Профиль». Калибровка
датчика выполняется в диапазоне от –40 до 40 мм по
специальной линейке (Рис. 3.31), установленной на датчике.
Рис.3.31 Линейка для настройки датчика профиля
ции:
хорды.
Для калибровки датчика продольного профиля необходимо
выполнить следующие опера-
Установить машину на прямолинейный горизонтальный
участок пути.
Опустить в рабочее положение все тележки измерительной
системы и натянуть трос
Расстопорить рамку датчика продольного профиля и
опустить ее на трос.
Войти в меню настройки датчика продольного профиля.
Ослабить два винта крепления рычага датчика и, вращая с
помощью отвертки ось дат-
чика, добиться расположения курсора на экране компьютера
в среднем (нулевом) положении, после чего затянуть винты
крепления датчика.
Закрепить специальную линейку на датчике просадки и
отрегулировать ее положение таким образом, чтобы стрелка
показывала значение «0».
Ослабить натяжение троса хорды и, перемещая рамку
датчика по ступенькам линейки от –40 мм до +40 мм,
произвести калибровку датчика по компьютеру.
По мере ввода новых положений штанги на графике,
соответственно, будут располагаться красные точки. После
полного прохождения ряда значений (-40,
-30,-20,-10,0,10,20,30,40 мм) на графике будет построена
интерполирующая линия.
ВНИМАНИЕ ! Если точки располагаются нелинейно, и в левом
нижнем углу графи- ка в черном окошке значение превышает 8,
необходимо повторить калибровку. Если повтор ничего не дает,
следует проверить датчик.
Теперь, когда создана электронная линейка, ее необходимо
проверить. Проверка осуще- ствляется по трем величинам: “0”
, минимальное и максимальное значение из ряда калибровок.
Отклонение не должно превышать +/-2 мм. Если проверка прошла
успешно, нажмите «Enter», в
противном случае - «Esc»,
тогда новая калибровка не будет сохранена.
Датчик «Шаблон». Перед
калибровкой необходимо установить машину на прямолиней- ный
участок и измерить ширину колеи под измерительной тележкой.
Затем опустить тележку на рельсы, натянуть трос хорды и
проверить показания стрелки по измерительной линейке датчика
«Шаблон». При этом нулевому делению шкалы соответствует
ширина колеи равная 1520 мм. Если натурное значение ширины
колеи не соответствует показанию по линейке, следует
ослабить крепежные болты и, перемещая линейку, установить
значение, соответствующее натурному («+»-уширение,
«-»-сужение колеи). После этого следует ослабить натяжение
хорды и, подняв тележку, установить распор. Дальнейшая
калибровка датчика выполняется в диапазоне от –20 (внутрь
колеи) до +30 (наружу колеи). После полного прохождения ряда
значений на графике будет построена интерполирующая линия.
Ввод поправок и привязка датчиков к натурным измерениям
Поправка для датчика «Шаблон» вводится на основании инструментального
промера ши- рины колеи. Необходимо после калибровки датчика установить
измерительную тележку на путь, натянуть хорду, войти в функцию
«Поправка» и выбрать «Вычисление». Ввести в графу
«Натурное значение» разницу между шириной колеи равной 1520 мм и
измеренным значением и подтвердить «Enter».
Настройка системы для машин ЭЛБ
Подготовительные работы
Прежде чем приступить к настройке системы необходимо:
Включить все необходимые тумблеры на пульте управления
выправкой.
Проверить работоспособность всех измерительных датчиков
(рабочий и контрольный стре- лограф, рабочий и
контрольный маятник, левая и правая просадка – для
машины ЭЛБ-3МК).
Установить на датчики измерительные линейки, по которым
будет производиться калиб- ровка.
Для электронного маятника изготовить брусок из металла с
размерами: 50x100x150. При помощи этого бруска будет
производиться калибровка маятника.
Опустить все тележки. Натянуть измерительную хорду.
Для рабочего и контрольного стрелографа проверить
поводок и зазор вилки для троса. Если трос свободно
перемешается внутри вилки более чем на 1 мм, необходимо
заменить пово- док.
Перед настройкой системы выкрутить все подстроечные
резисторы на плате ADC против часовой стрелки. Для
машин, оборудованных системой «Компас», резисторы R1-R8
должны быть выкручены по часовой стрелке, R9-R12 против
часовой. Для всех датчиков («Рабочий стрелограф»,
«Контрольный стрелограф», «Рабочий маятник»,
«Контрольный маятник», для ЭЛБ-3МК – «Левая просадка»,
«Правая просадка») переменными резисторами контроллера
R1-R6 добиться, чтобы желтый вертикальный курсор на
графике настройки не зашкаливал в крайних положениях.
При этом необходимо учитывать, что курсор должен
перемещаться по графику плавно и равномерно, после чего
можно приступать к настройке.
Меню программы «Настройка»
В зависимости от модификации машины типа ЭЛБ имеют некоторые
отличия в КИС (количество и тип измерительных датчиков).
Отличительной особенностью машины ЭЛБ-3МК от других
модификаций является наличие датчиков левой и правой
просадки (рис.3.32). Глав- ное меню программы «Настройка»
для данной машины содержит следующие функции:
Параметры машины
Рабочий стрелограф
Контрольный стрелограф
Рабочий маятник
Контрольный маятник
Левая просадка
Правая просадка
Контрольный заезд
КИС
Выход
Таким образом, при настройке машин ЭЛБ других
модификаций, отличных от ЭЛБ- 3МК, в главном меню
программы «Настройка» не будет содержаться
информация о датчиках
«Левая просадка» и «Правая просадка», а величина
измерительных плечей на схеме рихтовоч- ной системы
будет иметь другие значения.
Нивелировочная измерительная система машин типа ЭЛБ
при работе с АС «Навигатор» не участвует в процессе
расчета проектного положения пути и выправке
участка. В результате этого, при корректировке
параметров машины в меню функции «Настройка»
величина плечей на схеме нивелировочной системы
остается заданной по умолчанию.
Рис.3.32 Главное меню настройки для ЭЛБ-3МК
Конфигурация параметров системы
Функция конфигурирования и редактирования параметров системы
для машин ЭЛБ, на примере ЭЛБ-3МК, имеет вид
Рис.3.33 Редактор параметров системы
Калибровка датчиков и создание электронных линеек
Калибровка датчиков на машинах типа ЭЛБ производится по
аналогии с настройкой машины ВПР. Отличие заключается только
в настройке датчиков просадки для ЭЛБ-3МК.
Датчик «Просадка». Калибровка
датчиков просадок идет снизу вверх по линейке, уста-
новленной на датчике в диапазоне от 0 до 300 мм.
Прежде всего, необходимо установить электромагниты на рельс
и отметить это положение датчика на компьютере нулевое.
Установить на датчике штангу в положение, показанное в
желтом окне, и нажать
«Enter».
После полного прохождения ряда значений (0, 300 мм) на
графике будет построена интерполирующая линия.
ВНИМАНИЕ ! Если точки располагаются нелинейно, и в левом
нижнем углу любо- го графика в черном окошке значение
превышает 8, необходимо повторить калибровку. Если повтор
ничего не дает, следует проверить датчик.
Теперь, когда создана электронная линейка, ее необходимо
проверить. Проверка осуще- ствляется по трем величинам: “0”
, минимальное и максимальное значение из ряда калибровок.
Отклонение не должно превышать +/-2 мм. Если проверка прошла
успешно, нажмите «Enter», в
противном случае - «Esc»,
тогда новая калибровка не будет сохранена.
Ввод поправок и привязка датчиков к натурным измерениям
Поправка для датчиков просадки всегда будет равна 0, т.к. 0 мм датчика
при настройке соответствовал нулевому положению нивелировочной штанги и
электромагнитов. Необходимо после калибровки датчика опустить
электромагниты на рельс, установить штангу в нулевое по- ложение, войти
в функцию «Поправка» и выбрать «Редактирование». Ввести «0» и
подтвердить нажатием «Enter».
4. Съемка
Общие положения
Съемка натурного положения пути в плане, продольном профиле и по
уровню осуществ- ляется с заданной стартовой
позиции с прижимом тележек контрольно-измерительной системы
к левому или правому рельсу.
Тип прижима определяет выбор базового рельса, по которому
осуществляется выправка пути в плане и продольном профиле. Тип
прижима задается для всего участка даже в случае измерения
кривых разного направления. Точность чтения информации с
датчиков и построения программных заданий составляет 0.1 мм.
Съемка осуществляется с шагом 0,625 м и сопровождается выводом
на экран графиков:
Стрел изгиба рабочего и контрольного стрелографов;
Уровня;
Вертикальных стрел изгиба нивелировочных систем
левого и правого рельса. Кроме того, в верхней части
экрана отображаются данные, описывающие:
Наименование перегона;
Номер пути;
Местоположение машины;
Скорость движения;
Пройденный путь;
Время;
Продолжительность съемки;
Величина заноса переднего и заднего концов хорды.
В любом сечении пути может быть введен маркер
путевой разметки, отмечающий место- положение
различных устройств, сооружений и путевых знаков.
Каких-либо требований к плану и профилю начала и
конца участка система не предъявля- ет. Длина
снимаемого участка не должна превышать длины
перегона. Рекомендуется снимать участки длиной 1 – 2
км с учетом продолжительности выделяемых «окон» и
производительности путевой машины.
Съемка осуществляется в РАБОЧЕМ режиме. При этом АС
«Навигатор» позволяет про- водить съемку пути как
при движении ВПЕРЕД, так и в обратном направлении,
что сокращает время необходимое для подготовки к
выправке.
Начало съемки
В главном меню клавишами курсора и
«Enter» выбирается
пункт «СЪЕМКА». Появ- ляется окно (Рис. 4.1), в котором
выводится заранее созданный список перегонов.
Стрелками курсора и
клавишей «Enter» выбирается
нужный перегон из списка. Если перегон отсутствует в списке,
вызываются функции «Ввод нового перегона» или «Ввод одиночного
участка».
При выборе «Ввод нового перегона» в открывшемся окне следует
В
строке «Название перегона» русскими буквами набрать название
перегона, нажать
«Enter».
Используя
цифровые клавиши и клавиши курсора и
учитывая подсказки в нижней части «окна», ввести
последовательно:
Количество путей на перегоне;
Пикетаж начала перегона (км + м);
Пикетаж конца перегона (км + м).
ПРИМЕЧАНИЕ: Ввод каждого значения завершается
нажатием клавишей «Enter»
либо .
Выход из функции «Ввод нового перегона»
клавишей «Esc»
или «Enter»
при актив- ном окне «ОК».
Рис. 4.1 Список перегонов для съемки
Рис.4.2 Ввод нового перегона
Меню подтверждения имеет параметры, вызываемые
клавишами курсора и
«Enter»:
«ДА» – в базу данных заносится новый перегон;
«НЕТ» – возврат в окно «Ввод нового перегона»;
«Выход [Esc]» – переход в окно «Выбор стартовой
позиции». Для ввода следующего перегона
повторить описанные действия.
При выборе «Ввод одиночного участка» в
открывшемся окне «Ввод нового участка пу- ти»
следует ввести наименование участка съемки.
После выбора и ввода наименования перегона
(участка) в окне «Выбор стартовой пози- ции»
(рис. 4.3), оперируя стрелками курсора
, выбирают,
а стрелками задают:
Номер пути;
Направление движения;
Пикетаж стартовой позиции.
Выбор стартовой позиции завершается нажатием клавиши
«Enter» при
активной пози- ции «ОК» или «Esc».
В появившемся меню подтверждения правильности выбора
стартовой позиции:
«Да» - переход к началу измерений;
«Нет» - возврат к меню «Выбор стартовой позиции»;
«Выход [Esc]» - выход в главное меню.
Рис.4.3 Выбор стартовой позиции
Рис. 4.4 Параметры съемки
Затем в окне «Параметры съемки» (рис. 4.4), оперируя
стрелками курсора , выбирают,
а клавишами (Пробел/Enter)
задают:
Направление движения машины при съемке;
Тип прижима тележек;
Тип защемления хорды.
При работе в кривых малого радиуса (менее 250м)
рекомендуется выполнять съемку и выправку с
укороченной хордой и защемлением на контрольной
тележке.
После того как правильно задали параметры,
необходимо выбрать в меню пункт «Съемка» и
подтвердить «Enter».
Подготовка машины к съемке
Перед началом съемки необходимо выполнить следующие действия:
Проверить
работоспособность всех датчиков (подергиванием тросов,
прокруткой мерного колеса);
Установить
машину на стартовую позицию;
Отметить
стартовую позицию мелом или краской на шейке рельса и на
ближайшей шпале для ориентира;
Нажать «Enter» и
начать движение.
ВНИМАНИЕ! При
съемке криволинейных участков малых радиусов необходимо
выполнить фиксацию хорды на контрольной тележке машины и в меню
«Параметры съемки» выбрать со- ответствующий тип защемления
хорды.
Экранные формы меню программы «Съемка»
В процессе съемки графическое отображение результатов на экране
компьютера имеет следующий вид:
Рис. 4.5 Съемка
Верхняя панель включает в себя
Название перегона;
Положение машины по путевой разметке;
Расстояние от стартовой позиции;
Номер пути;
Направление движения;
Скорость движения при съемке;
Время работы;
Тип прижима;
Текущее время.
Рис. 4.6 Верхняя панель
Панель датчиков:
Рис. 4.7 Панель датчиков
Величина заноса переднего конца хорды;
Величина заноса заднего конца хорды;
Натурное значение рабочего стрелографа;
Натурное значение контрольного стрелографа (в данном
случае отключен);
Натурное значение рабочего уровня;
Натурное значение контрольного уровня (в данном случае
отключен);
Натурное значение левой просадки;
Натурное значение правой просадки;
Рис. 4.8 Графическая панель
Графическая панель:
Разметкат пути через 10 м; 2, 4, 7. Нулевая
линия;
3. Натурные значения стрел изгиба;
Натурные значения ВНР;
Натурные значения левой просадки;
Натурные значения правой просадки.
Рис. 4.9 Нижняя панель
Нижняя панель:
Выход и сохранение результатов съемки;
Просмотр снимаемого участка в процессе
съемки;
Установка маркеров;
Количество маркеров;
Название маркера.
Ввод маркеров
Маркеры путевой разметки, заранее вынесенные на путь в зону
видимости из кабины машиниста, вносятся в память компьютера в
момент установки колеса рабочей тележки на от- метку.
Рис. 4.10 Ввод маркеров
Ввод маркера осуществляется клавишей «Пробел»,
затем в открывшемся окне стрелка- ми курсора и
«Enter» выбирается
тип маркера.
Окончание съемки
Съемка натурного положения пути завершается нажатием клавиши «Esc» после
останов- ки машины. Конец участка отмечается аналогично началу
по оси рабочей тележки для контроля пройденного пути.
Сохранение результатов съемки
После нажатия «Esc» следует
подтвердить необходимость сохранения результатов съемки участка:
«Да» – результаты записываются в память компьютера;
«Нет» – результаты съемки не сохраняются;
«Отмена» - отменяет нажатие «Esc» и
съемку можно продолжить.
6. Расчет
1. Общие положения
«Расчет» – основная функция автоматизированной системы
«Навигатор», обеспечиваю- щая расчеты оптимального
пространственного положения пути с учетом технических
требова- ний, условий эксплуатации и заданных ограничений
перемещений пути.
Отличительные особенности программы расчетов системы
«Навигатор»:
проектные параметры плана линии, продольного
профиля и возвышения наружного рельса
вычисляются автоматически без
ввода какой – либо априорной информации о
радиу- сах, длинах переходных кривых,
положении характерных точек и переломов
продольного про- филя;
результаты расчетов – проектные стрелы
изгиба в плане и профиле, проектный уро-
вень и расчетные перемещения пути – строго
адекватны проектным параметрам без каких –
ли- бо приближенных вычислений и
сглаживания;
параметры плана линии и возвышения наружного
рельса определяются с учетом за- данных
скоростей движения поездов;
гибкий графический интерфейс позволяет легко
анализировать и корректировать ре- зультаты
расчетов с учетом дополнительных требований.
Необходимый для расчетов участок выбирается
из БАЗЫ ДАННЫХ.
Перед расчетом необходимо задать или
отредактировать предложенные компьютером
условия эксплуатации – скорости движения
поездов, ограничения, накладываемые на
сдвиги и подъемки.
Расчет выполняется автоматически, и на экран
выводятся графики результатов. Детальный
просмотр и редактирование результатов по
плану, уровню (ВНР) и продоль-
ному профилю позволяют откорректировать
проектные параметры и расчетные перемещения
пути с учетом локальных ограничений или иных
дополнительных требований к расчету. Эти
операции необходимо выполнять в строгой
последовательности: ПЛАН УРОВЕНЬ ПРОФИЛЬ.
Проектное ВНР зависит от параметров плана
линии, а исправления пути по уровню входят в
подъемки правого и левого рельса.
После окончания расчетов строится
программное задание для управления машинной
вы- правкой пути. Результаты расчетов
сохраняются в БАЗЕ ДАННЫХ и могут быть
распечатаны в виде таблиц и графиков,
которые служат паспортом рассчитанного
участка.
Выбор участка для расчетов
После активизации функции главного
меню «РАСЧЕТ» ( и
«Enter»)
на экран выво- дится список участков
с данными натурных измерений (рис.
5.1.). В нижнем окне экрана при-
водятся графики стрел изгиба
рабочего стрелографа для визуальной
идентификации участка. Если участок
был ранее рассчитан, на графике
красным цветом выведены проектные
стрелы изгиба.
Меню программы «Выбор участка пути
для расчетов» содержит функции:
ПЕРЕГОН – выбор
нужного перегона из списка;
ПУТЬ – задается номер пути;
СПИСОК УЧАСТКОВ – выводится
пикетаж стартовой позиции, дата и время
съемки участка;
ПРОСМОТР – вызывается
функция просмотра и редактирования натурных
измере-
ний;
ОК – переход
к расчетам.
При работе с меню следует руководствоваться подсказками
внизу экрана. Выбор осуще-
ствляется при помощи клавиш курсора и
«Enter».
В списке участков активный участок выделен синей
строкой. Нажатие «Enter» вызыва-
ет меню подтверждения:
Рис. 5.1. Выбор файла для расчета
«Да» – переход к расчетам выбранного участка;
«Нет» - возврат в меню выбора;
«Выход [Esc]» – выход в главное меню.
Рис. 5.2 Просмотр натурных измерений
Функция «Просмотр» (рис. 5.2.) обеспечивает:
Просмотр натурных измерений с масштабированием
графиков;
Редактирование выбросов на графиках, связанных с
ошибками измерений (скачки по уровню на стыках,
место падения тележек и пр.);
Вычисление поправок нулевой линии записи;
Разделение выбранного из списка файла на отдельные
участки с возможностью даль- нейшего просмотра и
расчета каждого из них;
Вывод графиков на печать.
Клавишей «F1» вызывается
«помощь», описывающая правила работы с программой.
Клавиши «PgUp» и
«PgDn» служат
для изменения горизонтального масштаба графиков,
клавиша «Home» устанавливает
курсор в начало участка, «End» –
в конец.
Стрелки перемещают
черный курсор, «Shift» и
«Ctrl» увеличивают
шаг курсо- ра в 10 и 100 раз. В нижней строке экрана
отражается позиция курсора (номер деления пути при
шаге 0,625 м, пикетажное значение и расстояние от
начала участка). При перемещении кур- сора в правой
части экрана выводятся цифровые значения записей.
Стрелками ,
«Пробел»
выбирается канал записи – план, уровень или профиль,
а клавишей «Enter» можно
менять ра- бочий или контрольный стрелограф, левый
или правый рельс в профиле.
После выбора канала становится активной функция
«РЕДАКТОР», появляется зеленый курсор и оцифровка
его позиции внизу экрана.
Программа «РЕДАКТОР» работает в двух режимах,
переключаемых клавишей «Tab»:
Изменение текущего значения в позиции курсора
стрелками ;
Вычисление среднего значения на участке между черным
и зеленым курсором.
Вторая функция «РЕДАКТОРА» позволяет автоматически
изменять «0» натурных изме- рений нажатием клавиши «Enter» .
Среднее значение можно отредактировать клавишами
кур- сора с
учетом характера данных.
Кроме того, с помощью функции «РЕДАКТОР» можно
произвести разделение выбран- ного файла пути на
отдельные участки для последующего расчета и
выправки полученных эле- ментов пути. Для этого
необходимо активировать функцию «РЕДАКТОР», с
помощью зеленого курсора ограничить длину
предполагаемого участка и нажать клавишу F5,
подтвердив сохране- ние выделенного участка.
Возврат из «Редактора» в меню «Выбор участка» –
клавиша «Esc»c
подтверждением внесенных в данные изменений. Переход
к расчету участка – клавиша «Enter» с
подтверждени- ем правильности выбора.
Меню программы «РАСЧЕТ»
Меню программы «РАСЧЕТ» содержит функции (рис. 5.3):
ПЛАН – детальный
просмотр и редактирование параметров плана линии,
ввод де- тальных ограничений сдвигов;
УРОВЕНЬ – просмотр и редактирование возвышения
наружного рельса;
ПРОФИЛЬ – просмотр и редактирование результатов
расчетов выправки пути в про- дольном профиле;
РЕЗУЛЬТАТЫ – просмотр таблиц результатов расчетов;
УСТАНОВКИ – ввод
скоростей движения поездов по участку и ограничений
переме- щений пути;
ПЕЧАТЬ – вывод на печать графиков и таблиц
результатов расчетов.
Выбор функции меню «РАСЧЕТА» осуществляется
клавишами и
«Enter».
Одновременно с выводом меню «РАСЧЕТ» на экран
выводятся графики натурных дан- ных и результаты
расчетов оптимального положения пути с шагом 10 м:
В плане – натурные и проектные стрелы изгиба
двадцатиметровой хорды и расчетные сдвиги;
По уровню – натурное и проектное возвышение
наружного рельса;
Рис.5.3. Меню программы «Расчет»
В профиле – натурные и проектные стрелы изгиба в
вертикальной плоскости и расчет- ные подъемки.
5.4 «Установки» расчетов
После выбора участка пути для расчета на экран
выводится таблица «Установок» расчетов (рис. 5.4),
определяющих основные ограничения, необходимые для
оптимизации пространствен- ного положения пути –
установленные скорости движения поездов и
ограничения перемещений пути в горизонтальной и
вертикальной плоскости. Исходные значения скоростей
и ограничений установлены программно.
Клавишами курсора выбирается
нужная позиция, а клавишами или
цифро- выми – изменяются или вводятся новые
значения. Ввод или подтверждение введенного или
установленного значения – клавиши или
«Enter».
Исходные данные для ввода или редактирования
установок назначаются руководителем работ с учетом
следующих факторов:
Максимальные скорости движения пассажирских и
грузовых поездов задаются не ниже установленных
приказом начальника дороги по скоростям;
Минимальная скорость грузовых поездов задается с
учетом действующих предупреж-
дений;
Среднеквадратическая скорость для расчетов проектного
ВНР задается техническим
отделом или вычисляется по существующему ВНР;
Ограничения сдвигов задаются с учетом степени
расстроенности пути, габаритных ог- раничений,
технических и технологических возможностей выправки
пути;
ПРИМЕЧАНИЕ: за один проход машина типа ВПР может
осуществлять сдвиги ве- личиной до 120
мм.
Рис. 5.4 Установки для расчета
Максимальные подъемки задаются величиной не менее 40
мм. Они ограничиваются наличием балласта и должны
задаваться с учетом переустройства ВНР;
Минимальные подъемки (10 – 20 мм) необходимы для
обеспечения условий подбив- ки шпал и зависят от
состояния балласта.
Меню «Установки» содержит функцию «Прямые вставки»,
переключаемую клавишей
«Пробел»
при активной строке. Функцию «Прямые вставки» целесообразно
включать при рас- четах участков с длинными прямыми в плане,
снятых точно настроенной машиной.
Выход из программы «Установки» по клавише «Enter» на
строке «ОК» или «Esc» с
под- тверждением.
Автоматический расчет и анализ результатов
После ввода установок происходит автоматический
расчет оптимального пространст- венного положения
пути с определением параметров плана линии,
возвышения наружного рельса, продольного профиля,
расчетных перемещений пути (сдвигов и подъемок
левого и пра- вого рельса) и допускаемых скоростей
движения поездов.
В процессе расчета в окне «проделанные операции»
отображается объем выполненных расчетов.
Продолжительность расчетов зависит от длины и
сложности участка и занимает не- сколько секунд.
После завершения расчетов на экран выводятся графики
натурных данных и результатов расчетов:
в плане – натурные и проектные стрелы изгиба
20-ти метровой хорды и расчетные сдвиги;
по уровню – натурное и проектное возвышение
наружного рельса;
в профиле – натурные и проектные вертикальные
стрелы изгиба 20-ти метровой хор- ды и подъемки
базового рельса, необходимые для выправки
профиля.
ВНИМАНИЕ! Полученные результаты могут быть
приняты для построения про- граммного задания на
выправку только при полной уверенности в их
корректности и соответствии заданным условиям
расчета.
Визуально могут быть определены следующие
характеристики результатов:
отсутствие сдвигов в первой и последней точках
участка;
эпюра сдвигов имеет знакопеременный характер;
сдвиги и подъемки в пределах заданных
ограничений;
заданные максимальные подъемки обеспечивают
необходимые исправления по уровню и достаточны
для выправки продольного профиля;
графики проектных стрел изгиба не имеют
необоснованных дополнительных радиусов;
эпюра ВНР соответствует проектной кривизне пути
в плане.
Для детального анализа и корректировок
результатов расчета необходимо воспользовать- ся
функциями меню «РАСЧЕТ».
Переустройство плана
Функция «ПЛАН» меню расчетов предназначена для:
детального просмотра и переустройства переходных
и круговых кривых;
ввода детальных ограничений расчетных сдвигов.
На рис. 5.5 представлено меню переустройства
плана линии. После вызова функции
«ПАРАМЕТРЫ» (рис. 5.6) клавишами и
«Enter» выбирается
переходная или круговая кривая, информация о
которой приводится внизу экрана. Клавишами и
«Enter» выбирается
необходимая функция переустройства – изменить
радиус, устроить прямую, изменить длину
переходной кривой, удалить или разделить
переходную кривую.
Процесс переустройства осуществляется клавишами и
мгновенно сопровождается вы- водом графиков.
Клавишами Ctrl
+ Backspace можно отменить заданное
переустройство. В режиме выбора позиции для
переустройства каждое нажатие этой комбинации
последовательно отменяет заданные изменения,
начиная с первоначального. Выход из
переустройства по нажатию клавиши «Esc».
Рис. 5.5 Меню программы «План линии»
Появится меню подтверждения:
«Да» – запомнит текущее состояние участка;
«Нет» - вернет первоначальное состояние участка;
«Отмена» – останется в переустройстве.
Рис. 5.6 Ручное переустройство плана
Функция «СДВИГИ» предназначена для детального
ограничения сдвигов в тех местах, где
перемещение пути в плане затруднено
(негабаритные места, мосты, переезды и т.п.).
Рис.5.7. Детальные ограничения сдвигов
После активизации функции «СДВИГИ» и выбора
направления ограничений сдвигов (слева или
справа), клавишами , Ctr и Ctr назначается
участок переустройства, а клавишами и
«Enter» вносятся
ограничения положительных или отрицательных
сдвигов. Функции «УСТАНОВКИ» и «РЕЗУЛЬТАТЫ» в
меню «ПЛАН» действуют так же, как и в меню
программы «РАСЧЕТ».
Переустройство возвышения наружного рельса
На рис. 5.8 приводится меню функции «УРОВЕНЬ»:
Рис. 5.8 Меню программы «Уровень»
ПЕРЕУСТРОЙСТВО – изменение ВНР на прямых и в
круговых кривых с шагом 5 мм;
СКОРОСТЬ – задание скорости из списка установок
для просмотра ограничивающих факторов;
УСТАНОВКИ – доступные значения
среднеквадратической скорости и ограничений
подъемок;
РЕЗУЛЬТАТЫ – выход в просмотр таблиц
результатов.
На графики выводятся натурное и проектное ВНР,
исправления по уровню, непогашенные ускорения,
скорости их нарастания и скорости подъема колеса на
ВНР.
При активизации функции «ПЕРЕУСТРОЙСТВО» ( и
«Enter»)
клавишами и
«Enter» выбирается
круговая кривая, а клавишами изменяются
значения проектного ВНР с пересчетом исправлений по
уровню (рис. 5.9) и ограничивающих факторов. При
активизации функции «СКОРОСТЬ» клавишами меняется
значение расчетной скорости, и пересчитыва- ются
графики (рис. 5.10).
Рис. 5.9 Ручное переустройство ВНР
Рис. 5.10 Проверка скоростей
Переустройство продольного профиля
Функция «ПРОФИЛЬ» предназначена для:
детального просмотра и переустройства
продольного профиля за счет изменения в ус-
тановках расчетов значений максимальной и
минимальной подъемок (Рис.5.11);
ввода детальных ограничений подъемок (Рис.5.12).
Рис. 5.11 Меню программы «Профиль»
Рис. 5.11 Детальные ограничения профиля
При выборе функции «ПОДЪЕМКИ» клавишами , Ctr и Ctrназначается
уча- сток переустройства, а клавишами и
«Enter» вносятся
ограничения подъемок (Рис.5.12).
Функции «УСТАНОВКИ» и «РЕЗУЛЬТАТЫ» в меню «ПРОФИЛЬ»
действуют также, как и в меню программы «РАСЧЕТ».
Результаты расчетов
тов.
При вызове функции «РЕЗУЛЬТАТЫ» на экран выводятся
таблицы результатов расче-
Выводится информационная таблица и три таблицы для
плана:
проектные параметры (рис. 5.13);
разбивочные данные (рис.5.14);
анализ допускаемых скоростей (рис.5.15).
А так же таблицы разбивочных данных для уровня
(рис.5.16) и для профиля (рис.5.17).
Рис. 5.13 Таблица «Проектные параметры»
В нижней части экрана выбора таблиц приводятся
графики соответствующих парамет- ров плана,
уровня и профиля.
Во время просмотра таблицы на графике в нижней
части экрана отображается положе- ние текущего
элемента.
Выбор параметров плана, уровня или профиля в
меню «РЕЗУЛЬТАТЫ» выполняется клавишами ,
переход к просмотру информационной таблицы и
таблиц плана – клавиша из
пункта «ПЛАН», а просмотр выбранной таблицы
осуществляется клавишами .
.
Рис. 5.14 Таблица «Разбивочные данные» в плане
Рис. 5.15 Таблица «Анализ допускаемых скоростей»
При просмотре таблицы «Анализ допускаемых
скоростей» можно выйти в ручное пере- устройство
параметров плана линии нажатием клавиши «Enter».
Активным при переустройстве будет текущий
элемент в таблице. Возврат к просмотру таблицы
после переустройства осуществляется клавишей «Esc».
Рис. 5.16 Таблица «Разбивочные данные ВНР»
Рис. 5.17 Таблица «Разбивочные данные в профиле»
Печать результатов
Вывод на принтер результатов расчета в виде таблиц и
графиков осуществляется из меню
«РАСЧЕТЫ» или из просмотра таблиц нажатием клавиши F10 (рис.
5.18). Клавишами и
«Пробел» выбираются
и отмечаются нужные таблицы и графики. Переход к печати по
клавише
«Esc» или
«Enter» при
активной (подкрашенной) позиции «ПЕЧАТЬ».
Рис. 5.17. Печать результатов
Примеры таблиц и графиков результатов расчетов приведены в
Приложении.
ВНИМАНИЕ! До вывода на печать на компьютере должен быть
установлен драйвер принтера, на который выводятся
результаты.
После завершения расчетов и оценки корректности полученных
результатов и их соответ- ствия заданным условиям расчета
строится програмное задание на выправку.
Выправка
Общее положение
Машинная выправка пути в плане, продольном и
поперечном профиле осуществляется на выбранном
участке с заданной стартовой позиции и с типом
прижатия, выбранным при съемке.
Выправка пути по трем координатам ведется в
автоматическом режиме при заглублении подбоек по
нажатию левой педали. В качестве программного
задания используются:
в плане – проектные стрелы рабочего
стрелографа и расчетные смещения переднего
конца хорды с проектной оси;
в профиле – вертикальные стрелы изгиба
нивелировочной системы базового рельса и
расчетные подъемки в передней точке;
по уровню – проектное возвышение наружного
рельса.
Программное задание обеспечивает возможность
постановки пути в проектное положе- ние с
точностью до 1 мм, но конечная точность
выправки пути зависит от:
точности настроек;
конструкции и состояния пути;
наличия балласта;
состояния рабочих органов машины;
качества подбивки.
При этом для машины Duomatic 09-32 GSM
задание строится с учетом движения сател-
лита (плавающие плечи хорд в плане и
профиле), а для машины Unimat 08-275S съемка
и вы- правка осуществляется с учетом
плавающих положений концов хорды в плане.
Так как рабочий маятник расположен
непосредственно на подвижной части машины,
ус- тановка проектного возвышения с его
использованием неточна. На смену старому
способу вы- правки, когда сначала по
базовому рельсу выправляется профиль, а по
небазовому устанавлива- ется возвышение,
пришел способ одновременной постановки пути
в продольном и поперечном профиле по
датчикам просадки с учетом положения
переднего и заднего маятника. Программ- ное
задание содержит подъемки для исправления
ВНР и профиля по двум нитям.
После начала цикла выправки команды на левый
и правый сервовентиль подаются одно-
временно. Тем самым повысилась скорость
отработки цикла выправки в 2-3 раза а также
ис- ключила «раскачивание» машины.
Процесс выправки отображается на экране
компьютера и на индикаторах машины и кон-
тролируется промерами выправленного пути по
уровню.
В случае необходимости машинист имеет
возможность:
перейти на ручное управление;
задать необходимые перерихтовки и
переподъемки базового и небазового рельса.
ПРИМЕЧАНИЕ: Перерихтовки задаются в случае
упругих отжатий и уводов пути с проектной
оси в плане. Отрицательные или положительные
переподъемки базового или не базового рельса
устанавливаются при плохих сервовентилях,
недостатке балласта и низком качестве
подбивки.
Контроль местоположения машины при выправке
осуществляется по маркерам, отме- ченным и
введенным при съемке.
В начале и конце участка выправки делаются
отводы существующего положения пути на
проектную ось: в плане, по уровню и средним
подъемкам. Отводы делаются с уклоном,
рассчи- танным по максимальной скорости. На
концах отводов подъемок, устраиваются
выкружки дли- ной 15 метров.
В случае экстренного окончания работы
устраиваются промежуточные отводы с проект-
ной оси на существующий путь по трем
координатам.
Начало выправки
В ГЛАВНОМ МЕНЮ клавишами и
«Enter» выбирается
функция «ВЫПРАВКА». По- является окно «Выбор участка
пути для выправки», аналогичное выбору участка пути
для расчета. В этом окне действуют те же принципы
выбора и просмотра участка, но для выбора
представлены только рассчитанные кривые – на графике
внизу экрана присутствует красная линия проектных
стрел изгиба пути в плане.
Стрелками курсора и
«Enter» последовательно
выбирается:
перегон,
путь,
участок из списка.
ПРИМЕЧАНИЕ: При выборе участка из списка
графики стрел изгиба помогают ви- зуально
идентифицировать нужный участок.
Активный участок из списка (выделенная
строка) может быть просмотрен, для этого
сле- дует активизировать функцию «ПРОСМОТР».
Редактировать натурные данные не требуется,
т.к. при выправке по построенному
программному заданию они не используются.
Выбор участка для выправки завершается
нажатием клавиши «Esc» или
«Enter».
Затем требуется подтвердить правильность
выбора:
«ДА» – правильно,
«НЕТ» – возврат в меню выбора,
«ВЫХОД [Esc]» – выход в ГЛАВНОЕ МЕНЮ.
Затем в окне «Параметры выправки» необходимо
выбрать пункт «Выправка» и подтвер-
дить «Enter».
Подготовка машины к выправке
Перед началом выправки необходимо выполнить
следующие действия:
- Индикатор отклонений стрелы изгиба от
проектного положения пути в плане (красный
сектор-отклонение от проекта 2
мм, белый сектор 0.5
мм, в окне вверху полукруга выводятся текущее
отклонение от проекта);
- Положение сателлита;
- Проектное значение сдвига в плане;
- Индикатор установленной левой переподъемки; 10
- Индикатор ошибки левой подъемки;
11 - Проектное значение левой подъемки; 12 -
Натурное значение левой просадки;
- Индикатор отклонений возвышения наружного
рельса по контрольному маятнику от проектного
положения пути (красный сектор-отклонение от
проекта 2
мм, белый сектор 0.5
мм, в окне вверху полукруга выводятся текущее
отклонение от проекта);
- Натурное значение преднего маятника; 16 -
Натурное значение рабочего маятника; 17 -
Проектное значение рабочего маятника;
1 - Начало правой подъемки; 2 - Начало рихтовки;
3 - Начало левой подъемки;
Рис.6.4
- Натурное значение правой просадки;
- Индикатор установленной правой переподъемки;
20 - Индикатор ошибки правой подъемки;
- Проектное значение правой подъемки;
- Индикатор отклонений возвышения наружного
рельса по рабочему маятнику от про- ектного
положения пути (красный сектор-отклонение от
проекта 2
мм, белый сектор
0.5
мм, в окне вверху полукруга выводятся текущее
отклонение от проекта); 23 - Проектное значение
переднего маятника;
24 - Натурное значение контрольного маятника; 25 -
Проектное значение контрольного маятника.
Графическая панель
Рис.6.5 Графическая панель
1 - Отметка пути через 10 м; 2 - Положение
маркера;
3 - Положение машины по рабочей тележке; 4 -
Натурные значения стрел изгиба;
5 - Проектные значения стрел изгиба;
6, 10, 13, 17 - Состояние выправленного пути в
рабочей зоне; 7 - Проектные сдвиги;
8 - Подъемки по левой рельсовой нити; 9 -
Натурные значения левой просадки;
11 - Проектные значения левой просадки; 12 -
Проектные значения ВНР;
14 - Натурные значения ВНР; 15 - Нулевая линия;
16 - Натурные значения правой просадки; 18 -
Проектные значения правой просадки; 19 -
Подъемки по правой рельсовой нити.
Меню функций выправка: 1 - Подсказка;
- Выбор задатчика и формирование дополнительных
поправок к программному заданию;
- Индикация активного задатчика;
- Выбор режима выправки «Автоматический» –
«Ручной»;
- Переход к просмотру программного задания и
обратно (рис.6.6);
- Привязка программного задания к натурному
положению пути в местах размещения внешних
маркеров;
– Выход и экстренное завершение выправки.
Рис.6.6 Меню функции выправка
Движение по меню – клавишами . Нужные
функции могут вызываться соответст- вующими
«горячими клавишами» – «ESC»,
«F1», «F2», «F3», «F4».
В нижней статусной строке экрана выводится текущее
положение курсора меню выправ-
ки.
Для машин типа ПРБ, ЭЛБ, ВПО строка «Меню функции
выправка» имеет дополни-
тельную клавишу «OnOff [F6]». Данная функция
позволяет имитировать действие педали опус- ка
подбивочных блоков и исключить колебания машин
непрерывного типа, не оборудованных сервовентилями,
возникающие в процессе выправки из-за быстродействия
электромагнитных реле, а так же для компенсации
замедления в работе гидрораспределителей.
Рис. 6.7
1 - время, в течение которого подается сигнал на
выправку; 2 - время бездействия рабочих органов;
3 - величина отклонения от проекта («белый» сектор
на индикаторе) по рихтовке, при котором выправка
осуществляться не будет.
Рис. 6.8 Параметры выправки
Указанные параметры для каждой машины определяются
исходя из особенностей дейст- вия рабочих органов.
Оптимальными величинами, согласно практике,
являются:
Время: On-0.1 сек.;
Off-0.5 сек.
Сектор: 1.5 мм.
Рис.6.7 Полное программное задание
Автоматический и ручной режим
Перемещение по меню функции «Режим
РАБОТЫ» клавишами курсора (рис.6.8).
Нажатием «Пробел» можно включить или выключить
следующие индикаторы режима выправ- ки:
«Автомат» – осуществляет выправку в
автоматическом режиме, при его отключении машина
переходит на ручное управление.
«Рихтовка» и «Подъёмка» - позволяет выполнять
каждый из типов работ как само- стоятельно, так
и совместно.
«Ускоренная «Рихтовка» и «Подъемка» -
применяется при плохом состоянии ВСП (упругий
путь, загрязненный балласт и т.п.) увеличивая в
два раза ток на сервовен- тиль.
«Автоматический отвод» - предназначен для
компенсации систематических отклоне- ний
натурного положения пути от проекта, возникающих
в процессе машинной вы- правки в начальной и
конечной точках участка. Данные отклонения
вызваны тем, что в указанный момент времени
некоторая часть машины находится на пути с
неизвест- ным натурным положением. При этом
величина ошибки зависит от параметров ма- шины и
механических расстройств КИС (люфты тележек и
измерительных датчиков) и степени расстройства
пути.
Оптимальная длина автоматического отвода
составляет 6 м.
Рис.6.8 Выбор режима выправки
При нормальных условиях работы (хорошее
состояние верхнего строения пути и маши- ны)
выправка должна выполняться в АВТОМАТИЧЕСКОМ
режиме. При этом перемещения пути выполняются
только при нажатой левой педали управления, т.е.
при заглублении подбоек. При неисправной машине
и плохом состоянии ВСП (упругий путь,
загрязненный бал-
ласт, гнилые шпалы, наддернутые костыли и т.п.)
в целях повышения производительности и качества
выправки следует переходить на «Ручное»
управление или использовать функцию "Задатчик".
Задатчики
Инструментальной проверкой или визуально может быть
установлено низкое качество выправки пути. Кроме приведенных
выше причин этому способствуют неисправные сервовенте- ли.
Предусмотренная системой функция «Задатчик» (рис. 6.9)
выполняет роль соответствую- щих ручных задатчиков
перерихтовок или переподъемок.
Рис.6.9 Работа с задатчиками
Функция «Задатчик» состоит из 7 задатчиков объединенных в
две группы:
«Коррекция <0>» - выполняет функцию соответствующих
ручных задатчиков, предна- значенных для ввода
необходимых поправок (в мм) в процессе выправки
(слева направо соответственно): рихтовка, подъемка,
уровень.
«Поправки <%>» - автоматическое вычисление поправок
к ручным задатчикам (про- центная доля «ошибки
выправки» в текущем сечении пути на момент
заглубления подбивочных блоков).
Назначение задатчиков: Рихтовка , Упругая отдача -
план;
Подъемка, Усадка пути - продольный профиль;
Уровень, Возвышение, Контрольный уровень -
поперечный профиль (возвышение).
Необходимые поправки определяются экспериментально с
учетом текущего состояния участка пути и качества
выправки.
Совмещение программного задания по маркерам
Маркеры путевой разметки, записанные при
съемке, выводятся на графики программного
задания в виде горизонтальных линий.
В момент расположения оси рабочей тележки в
точке маркера линия маркера на экране должны
совпадать с постоянной линией выправки на
экране.
Если отставание или опережение не превышает
5 метров, нажатием клавиши «F4» мож-
но продвинуть программное задание вперед или
назад для совмещения его индекса с фактиче-
ским положением машины. То же происходит при
активизации позиции меню «Маркер» кла-
вишами и «Enter».
Окончание выправки. Экстренный отвод
Выправка пути автоматически завершается при
окончании программного задания – се- рая полоса,
надвигающаяся сверху, заполняет всю область
программного задания на экране вы- правки.
В случае экстренного завершения выправки до
окончания программного задания следует остановить
машину и нажать клавишу «Esc».
Программа продолжит работу в зависимости от
выбранного ответа на запрос компьюте-
ра:
«Да» – с устройством экстренного отвода;
«Нет» – прекращение выправки без устройства отвода;
«Отмена» – продолжение выполнения программного
задания.
При выборе «ДА» появляется окно с необходимыми
подсказками (рис.6.10).
Следует выбрать оптимальный уклон отвода с учетом
требований безопасности движе-
ния поездов и времени, отпущенного на устройство
отвода. На рельсе делается отметка начала отвода по
оси тележки рабочего стрелографа и клавишей «Enter» запускается
программа уст- ройства отвода.
Рис. 6.10 Экстренный отвод
При последующей выправке недоработанного участка
работа начинается с заданной от- метки, при этом
автоматически восстанавливается устроенный отвод.
Если клавиша «Esc»
нажимается во время работы в конце участка на
запрограммирован- ном отводе, программа потребует
завершения отвода.
При окончании выправки на экране компьютера
появляется информационное окно, рег- ламентирующее
порядок действий по завершению работы.
Рис. 6.11 Завершение выправки
Утилиты
Утилиты разбиты на четыре группы: (рис. 7.1.)
управление;
редактор;
игры;
Нортон утилиты.
Группа «Управление» содержит:
панель управления для изменения системных
настроек и установки принтера;
часы для изменения даты и времени;
калькулятор.
Группа «Редактор» содержит:
текстовый редактор;
графический редактор;
записную книжку.
Группа «Игры» содержит стандартные игры из
набора Windows.
Группа «Нортон утилиты» содержит программы:
проверки и устранения неисправностей на жестком
диске;
ускорения работы винчестера;
проверки оперативной памяти.
Запуск утилит, обслуживающих компьютер, нужно делать не реже
одного раза в неделю.
Рис. 7.1. Утилиты для обслуживания компьютера
Для установки драйвера принтера следует привлекать
специалистов в области компью- терной техники.
Техническое обслуживание
Техническое обслуживание проводится с целью обеспечения
бесперебойной работы, поддержа- ния эксплуатационной
надежности и повышения эффективности использования системы
«На- вигатор»
Для системы устанавливаются следующие виды технического
обслуживания:
текущее (техническое обслуживание при использовании);
плановое (техническое обслуживание проводится в начале и
в середине сезона летних путевых работ).
При текущем обслуживании внешним осмотром проверяют
целостность компьютера, кон- троллера, блоков питания,
датчиков и соединительных кабелей. После включения проверяют
функционирование системы при помощи перемещений датчиков.
При плановом обслуживании проводят настройку и привязку всех
датчиков.
При замене элементов, влияющих на метрологические
характеристики системы (замена датчиков, тележек
контрольно-измерительной системы), необходимо провести
настройку.
Гарантийные обязательства
Предприятие-производитель гарантирует работу системы в
течение 12 месяцев со дня ввода в эксплуатацию, при
соблюдении потребителем условий эксплуатации в соответствии
с руководством по эксплуатации системы.
Возможные неисправности и методы их устранения при монтаже и
эксплуатации
Неисправность
Возможная причина
Метод устранения
1. Не светится индика- торная лампа на блоке питания
Нет бортового питания
Обрыв кабеля от бор- тового питания к блоку питания.
Переполюсовка вход- ного кабеля
Короткое замыкание по выходу
24В.
Обеспечить входное напряжение 24 В.
Устранить обрыв вход- ного кабеля
Проверить полярность подключения
Устранить короткое замыкание по выходу
2. Не светится индика- торная лампа на кон- троллере
Обрыв кабеля от блока питания к контроллеру
Отсоединен разъем ка- беля питания у кон- троллера
Устранить обрыв кабеля
Вставить и закрепить разъем кабеля питания компьютера
3. Не запускается про- граммное обеспечение
Наличие «вирусов» в компьютере
Испорчено программ- ное обеспечение
Обрыв кабеля питания
Устранить «вирусы» запуском сервисной программы
Загрузить резервную копию программного обеспечения
Устранить обрыв
4. Не проходит тест линии связи
Не подключен кабель связи
Отсутствует напряже- ние питания котроллера (при этом не
горит ин- дикаторная лампа)
Проверить подключение и целостность кабеля связи
Связаться с поставщи- ком
5. Не изменяются пока- зания датчика при пе- ремещении
поводка
Не работает датчик
Обрыв монтажных ка- белей или плохой кон- такт в
разъемах
Заменить датчик
Проверить и устранить обрыв и контакт
6. Не происходит съемка или выправка
Не работает датчик пу- ти
Обрыв монтажного ка- беля или плохой кон- такт
Не вращается колесо
Заменить датчик
Проверить и закрепить монтажный кабель
Устранить поломку или заменить новым
ВНИМАНИЕ: ПРИ ОБНАРУЖЕНИИ ДРУГИХ НЕИСПРАВНОСТЕЙ НЕОБХОДИМО СВЯЗАТЬСЯ С
ПОСТАВЩИКОМ! НЕ ПЫТАТЬСЯ УСТРАНЯТЬ НЕИСПРАВНОСТИ САМОСТОЯТЕЛЬНО!
11. СВИДЕТЕЛЬСТВО
О ПРИЕМКЕ
АС «Навигатор»
ВМНИ. 663519.001.РЭ
наименование изделия
обозначение
серийный номер
Изготовлена и принята в соответствии с обязательными требованиями
государственных стан- дартов, действующей технической документации и
признана годной для эксплуатации.
Главный инженер
МП _ _
личная подпись расшифровка подписи
год, месяц, число
Приложение А Пример результатов расчетов
10.07.1999 Таблица 1.1
Проектные параметры
кривой на 3571 км + 45 м перегона АНЖЕРСКАЯ-ТАЙГА, путь 3
Пикетаж характерных точек
Длина кривой, м
Радиус, м
Возвышение
Точка
KM +M
круговой
переходной
мм
Уклон отвода
НПК1
3570+805
108.72
100.98
-695.13
-80
0.84
НКК1
3570+754
КПК1
3570+704
НПК2
3570+595
НКК2
3570+580
30.00
0.00
КПК2
3570+565
199.68
-655.35
-80
НПКЗ
3570+365
НКК3
3570+299
131.71
0.64
КПК3
3570+234
118.02
Прямая
НПК4
3570+115
НКК4
3570+65
101.68
0.65
КПК4
3570+14
251.74
1039.05
70
НПК5
3569+762
НКК5
3569+688
147.22
0.44
КПК5
3569+615
270.34
Прямая
10.07.1999 Таблица 1.3
Анализ допускаемых скоростей
кривой на 3571 км + 45 м перегона АНЖЕРСКАЯ - ТАЙГА, путь 3
Описание элементов плана линии
Установ. скорость км/ч
Факторы огранич. скорости
Допуск. скорость км/ч
Причины ограничений скорости
Анеп м/с кв.
Кси м/с кв.
Fv мм/с
ПЕРЕХОДНАЯ КРИВАЯ
100
0.62
0.18
23
120
Приказ Н
3570 КМ + 805 м - 3570 км + 704 м
80
Длина = 100.98 м
40
Длина отвода = 100.98 м
Уклон отвода = 0.00084
КРУГОВАЯ КРИВАЯ
100
103
Приказ Н
3570 км + 704 м - 3570 км + 595 м
80
0.22
84
Приказ Н
Длина = 108.72 м
40
-0.31
41
Радиус и ВНР
возвышение = 80.00 им
Радиус = 695.13 м
ПЕРЕХОДНАЯ КРИВАЯ
100
0.06
0
160
Приказ Н
3570 км + 595 м - 3570 км ••• 565 м
80
Длина = 30.00 м
40
КРУГОВАЯ КРИВАЯ
100
0.69
100
Приказ Н
3570 км + 565 м - 3570 км +• 365 м
80
0.26
81
Приказ Н
Длина = 199.68 м
40
-0.30
40
Приказ Н
Возвышение = 80.00 мм
Радиус = 655.35 м
ПЕРЕХОДНАЯ КРИВАЯ
100
0.15
18
160
Приказ Н
3570 км + 365 м - 3570 км + 234 м
80
Длина = 131.71 м
40
Длина отвода = 131.71 м
Уклон отвода = 0.00064
ПРЯМАЯ
100
100
Приказ Н
3570 км + 234 м - 3570 км + 115 м
Длина = 118.02 м
0
ПЕРЕХОДНАЯ КРИВАЯ
100
0.09
18
160
Приказ Н
3570 км -1- 115 м - 3570 км + 14 м
80
Длина = 101.68 м
40
Длина отвода = 101.68 и
Уклон отвода = 0.00065
КРУГОВАЯ КРИВАЯ
100
0.31
123
Приказ Н
3570 км + 14 м - 3569 км + 762 м
80
0.05
99
Приказ Н
Длина = 251.74 м
40
-0.31
41
Радиус и ВНР
Возвышение = 70.00 ми
Радиус = 1039.05 м
ПЕРЕХОДНАЯ КРИВАЯ
100
0.06
12
160
Приказ Н
3569 км + 762 м - 3569 км + 615 м
80
Длина = 147.22 м
40
Длина отвода = 147.22 м
Уклон отвода = 0.00044
10.07.1999 Таблица 2.1
Разбивочные данные
кривой на 3571 км + 45 м перегона АНЖЕРСКАЯ-ТАЙГА, путь 3
Номер точки
Стрелы изгиба
Сдвиги, мм
Изменение зазоров, мм
Возвышение наружного рельса, мм
Натура, мм
Проект, мм
1
0
0
0
0
18
2
-2
0
1
0
6
3
0
0
-1
0
5
4
0
0
-6
0
5
5
4
0
-11
0
5
6
0
0
-8
0
5
7
-1
0
-5
0
5
8
0
0
-5
0
5
9
-3
0
-4
0
5
10
4
0
-10
0
5
11
-3
0
-7
0
5
12
1
0
-10
0
5
13
-2
0
-10
0
5
14
-1
0
-14
0
5
15
-2
0
-22
0
5
16
-1
0
-34
0
5
17
0
0
-48
0
5
18
3
0
-61
0
5
19
-1
0
-67
0
5
20
1
0
-74
0
5
21
6
0
-79
0
5
22
7
0
-69
0
5
23
0
0
-45
0
5
24
0
-1
-23
0
3
25
-13
-7
3
0
-3
26
-16
-14
16
0
-11
27
-22
-21
26
0
-20
28
-26
-28
34
0
-28
29
-43
-35
41
0
-37
30
-48
-42
32
-1
-45
31
-50
-49
12
-1
-53
32
-54
-57
-8
-1
-62
33
-57
-64
-24
0
-70
34
-61
-70
-27
0
-78
35
-78
-71
-12
0
-80
36
-68
-71
-11
0
-80
37
-70
-71
-4
0
-80
38
-73
-71
6
0
-80
39
-70
-71
13
0
-80
40
-73
-71
23
0
-80
41
-78
-71
29
-1
-80
42
-74
-71
23
-1
-80
43
-70
-71
11
-1
-80
44
-69
-71
1
-1
-80
45
-72
-72
-3
-1
-80
46
-74
-73
-10
-1
-80
47
-73
-74
-20
-1
•80
48
-71
-76
-28
0
-80
49
-73
-76
-27
0
-80
50
-75
-76
-19
0
-80
51
-78
-76
-11
0
-80
52
-73
-76
-7
0
-80
53
-75
-76
1
0
-80
54
-77
-76
13
0
-80
55
-80
-76
21
0
-80
56
-74
-76
21
0
-80
57
-74
-76
24
-1
-80
58
-75
-76
31
-1
-80
59
-85
-76
39
-2
-80
60
-78
-76
30
-2
-80
61
-76
-76
16
-2
-80
62
-74
-76
1
-2
-80
63
-76
-76
-9
-2
-80
64
-80
-76
-21
-2
-80
65
-71
-76
-41
-1
-80
66
-75
-76
-53
0
-80
67
-69
-76
-63
0
-80
10.07.1999 Таблица 2.2
Номер точки
Стрелы изгиба
Сдвиги, мм
Изменение зазоров, мм
Возвышение наружного рельса, мм
Натура, мм
Проект, мм
135
18
25
29
0
40
136
22
22
32
0
35
137
15
19
34
0
31
138
11
16
28
0
26
139
16
12
13
0
22
140
12
9
5
0
18
141
0
6
2
0
13
142
8
2
-10
0
9
143
3
0
-12
0
5
144
2
0
-7
0
5
145
-3
0
2
0
5
146
0
0
5
0
5
147
2
0
7
0
5
148
0
0
14
0
5
149
-1
0
21
0
5
150
-1
0
24
0
5
151
0
0
26
0
5
152
0
0
28
0
5
153
-5
0
32
0
5
154
0
0
25
0
5
155
2
0
18
0
5
156
0
0
16
0
5
157
0
0
12
0
5
158
0
0
7
0
5
159
0
0
2
0
5
160
-3
0
0
0
5
161
0
0
-10
0
5
162
1
0
-19
0
5
163
-1
0
-25
0
5
164
0
0
-33
0
5
165
2
0
-42
0
5
166
5
0
-45
0
5
167
2
0
-36
0
5
168
0
0
-21
0
5
169
-3
0
-7
0
7
170
-3
0
0
0
19
10.07.1999 Таблица 2.3
Номер точки
Стрелы изгиба
Сдвиги, мм
Изменение зазоров, мм
Возвышение наружного рельса, мм
Натура, мм
Проект, мм
135
18
25
29
0
40
136
22
22
32
0
35
137
15
19
34
0
31
138
11
16
28
0
26
139
16
12
13
0
22
140
12
9
5
0
18
141
0
6
2
0
13
142
8
2
-10
0
9
143
3
0
-12
0
5
144
2
0
-7
0
5
145
-3
0
2
0
5
146
0
0
5
0
5
147
2
0
7
0
5
148
0
0
14
0
5
149
-1
0
21
0
5
150
-1
0
24
0
5
151
0
0
26
0
5
152
0
0
28
0
5
153
-5
0
32
0
5
154
0
0
25
0
5
155
2
0
18
0
5
156
0
0
16
0
5
157
0
0
12
0
5
158
0
0
7
0
5
159
0
0
2
0
5
160
-3
0
0
0
5
161
0
0
-10
0
5
162
1
0
-19
0
5
163
-1
0
-25
0
5
164
0
0
-33
0
5
165
2
0
-42
0
5
166
5
0
-45
0
5
167
2
0
-36
0
5
168
0
0
-21
0
5
169
-3
0
-7
0
7
170
-3
0
0
0
19
10.07.1999 Таблица 4.1
Возвышение наружного рельса
кривой на 3571 км +45 м перегона АНЖЕРСКАЯ – ТАЙГА, путь 3
Номер точки
Возвышение наружного рельса, мм
Исправления по уровню, мм
Анеп, м/с кв.
Кси, м/с кв.
Fv, мм/с
Натура
Проект
1
18
18
0
-0.11
0.00
0
2
5
6
1
-0.04
0.11
18
3
16
5
-11
-0.03
0.02
3
4
21
5
-16
-0.03
0.00
0
5
14
5
-9
-0.03
0.00
0
6
17
5
-12
-0.03
0.00
0
7
9
5
-4
-0.03
0.00
0
8
13
5
-8
-0.03
0.00
0
9
17
5
-12
-0.03
0.00
0
10
16
5
-11
-0.03
0.00
0
И
20
5
-15
-0.03
0.00
0
12
7
5
-2
-0.03
0.00
0
13
19
5
-14
-0.03
0.00
0
14
17
5
-12
-0.03
0.00
0
15
12
5
-7
-0.03
0.00
0
16
15
5
-10
-0.03
0.00
0
17
16
5
-11
-0.03
0.00
0
18
18
5
-13
-0.03
0.00
0
19
13
5
-8
-0.03
0.00
0
20
13
5
-8
-0.03
0.00
0
21
14
5
-9
-0.03
0.00
0
22
8
5
-3
-0.03
0.00
0
23
2
5
2
-0.03
0.00
0
24
-7
3
10
-0.03
0.01
2
25
-9
-3
б
-0.02
0.02
11
26
-9
-11
-2
-0.01
0.02
14
27
-22
-20
1
0.01
0.02
14
28
-34
-28
5
0.02
0.02
14
29
-42
-37
5
0.03
0.02
14
30
-35
-45
-10
0.04
0.02
14
31
-47
-53
-6
0.05
0.02
14
32
-57
-62
-5
0.07
0.02
14
33
-60
-70
-10
0.08
0.02
14
34
-73
-78
-4
0.09
0.02
11
35
-63
-80
-17
0.09
0.01
3
36
-66
-80
-14
0.09
0.00
0
37
-68
-80
-11
0.09
0.00
0
38
-63
-80
-16
0.09
0.00
0
39
-76
-80
-3
0.09
0.00
0
40
-70
-80
-9
0.09
0.00
0
41
-83
-80
3
0.09
0.00
0
42
-94
-80
14
0.09
0.00
0
43
-84
-80
4
0.09
0.00
0
44
-100
-80
20
0.09
0.00
0
45
-71
-80
-8
0.09
0.00
0
46
-78
-80
-2
0.08
0.01
0
47
-81
-80
1
0.07
0.01
0
48
-68
-80
-12
0.07
0.01
0
49
-82
-80
2
0.07
0.00
0
50
-75
-80
-4
0.07
0.00
0
51
-74
-80
-6
0.07
0.00
0
52
-85
-80
5
0.07
0.00
0
53
-68
-80
-12
0.07
0.00
0
54
-91
-80
11
0.07
0.00
0
55
-74
-80
-5
0.07
0.00
0
56
-65
-80
-14
0.07
0.00
0
57
-63
-80
-16
0.07
0.00
0
58
-64
-80
-15
0.07
0.00
0
59
-80
-80
0
0.07
0.00
0
60
-66
-80
-13
0.07
0.00
0
61
-77
-80
-3
0.07
0.00
0
62
-87
-80
7
0.07
0.00
0
63
-65
-80
-14
0.07
0.00
0
64
-66
-80
-13
0.07
0.00
0
65
-67
-80
-12
0.07
0.00
0
66
-72
-80
-7
0.07
0.00
0
67
-68
-80
-12
0.07
0.00
0
68
-70
-78
-8
0.06
0.00
2
10.07.1999 Таблица 4.2
Номер точки
Возвышение наружного рельса, мм
Исправления по уровню, мм
Анеп, м/с кв.
Кси, м/с кв.
Fv,
мм/с
Натура
Проект
69
-71
-73
-1
0.06
0.01
8
70
-70
-66
3
0.05
0.01
10
71
-83
-60
23
0.04
0.01
10
72
-73
-54
19
0.04
0.01
10
73
-71
-47
23
0.03
0.01
10
74
-52
-41
10
0.02
0.01
10
75
-31
-34
-3
0.02
0.01
10
76
-32
-28
3
0.01
0.01
10
77
-21
-22
0
0.00
0.01
10
78
-16
-15
0
-0.01
0.01
10
79
-10
-9
0
-0.01
0.01
10
80
7
-3
-10
-0.02
0.01
10
81
8
2
-5
-0.03
0.01
9
82
15
4
-11
-0.03
0.00
2
83
9
4
-5
-0.03
0.00
0
84
-1
4
5
-0.03
0.00
0
85
17
4
-13
-0.03
0.00
0
86
8
4
-4
-0.03
0.00
0
87
9
4
-5
-0.03
0.00
0
88
10
4
-6
-0.03
0.00
0
89
7
4
-3
-0.03
0.00
0
90
6
4
-2
-0.03
0.00
0
91
1
4
3
-0.03
0.00
0
92
7
4
-3
-0.03
0.00
0
93
11
5
-5
-0.03
0.01
2
94
5
11
5
-0.04
0.02
9
95
14
17
3
-0.06
0.02
10
96
15
24
8
-0.07
0.02
10
97
27
30
г
-0.08
0.02
10
98
36
37
1
-0.10
0.02
10
99
44
43
-1
-0.11
0.02
10
100
57
50
-7
-0.12
0.02
10
101
70
56
-13
-0.13
0.02
10
102
75
63
-11
-0.15
0.02
10
103
80
68
-11
-0.16
0.02
9
104
76
70
-6
-0.16
0.01
2
105
80
70
-10
-0.16
0.00
0
106
77
70
-7
-0.16
0.00
0
107
73
70
-3
-0.16
0.00
0
108
77
70
-7
-0.16
0.00
0
109
65
70
5
-0.16
0.00
0
110
79
70
-9
-0.16
0.00
0
111
85
70
-15
-0.16
0.00
0
112
79
70
-9
-0.16
0.00
0
113
83
70
-13
-0.16
0.00
0
114
63
70
6
-0.16
0.00
0
115
82
70
-12
-0.16
0.00
0
116
82
70
-12
-0.16
0.00
0
117
76
70
-6
-0.16
0.00
0
118
79
70
-9
-0.16
0.00
0
119
69
70
0
-0.16
0.00
0
120
79
70
-9
-0.16
0.00
0
121
75
70
-5
-0.16
0.00
0
122
80
70
-10
-0.16
0.00
0
123
79
70
-9
-0.16
0.00
0
124
71
70
-1
•0.16
0.00
0
125
74
70
-4
•0.16
0.00
0
126
71
70
-1
•0.16
0.00
0
127
70
70
0
-0.16
0.00
0
128
69
69
0
-0.16
0.00
0
129
67
66
0
-0.16
0.01
4
130
72
62
-9
-0.15
0.01
7
131
73
57
-15
-0.14
0.01
7
132
70
53
-17
-0.13
0.01
7
133
75
48
-26
-0.12
0.01
7
134
64
44
-20
-0.11
0.01
7
135
66
40
-25
-0.10
0.01
7
136
59
35
-23
-0.09
0.01
7
10.07.1999 Таблица 4.3
Номер точки
Возвышение наружного рельса, мм
Исправления по уровню, мм
Анеп, м/с кв.
Кси, м/с кв.
Fv, мм/с
Натура
Проект
135
66
40
-25
-0.10
0.01
7
136
59
35
-23
-0.09
0.01
7
137
50
31
-18
-0.08
0.01
7
138
46
26
-19
-0.08
0.01
7
139
16
22
6
-0.07
0.01
7
140
12
18
5
-0.06
0.01
7
141
17
13
-3
-0.05
0.01
7
142
2
9
6
-0.04
0.01
7
143
3
5
2
-0.03
0.01
5
144
-6
5
11
-0.03
0.00
1
145
9
5
-4
-0.03
0.00
0
146
7
5
-2
-0.03
0.00
0
147
4
5
0
-0.03
0.00
0
148
3
5
2
-0.03
0.00
0
149
-7
5
12
-0.03
0.00
0
150
5
5
0
-0.03
0.00
0
151
8
5
-3
-0.03
0.00
0
152
7
5
-2
-0.03
0.00
0
153
5
5
0
-0.03
0.00
0
154
-5
5
10
-0.03
0.00
0
155
11
5
-6
-0.03
0.00
0
156
5
5
0
-0.03
0.00
0
157
2
5
2
-0.03
0.00
0
158
-1
5
6
-0.03
0.00
0
159
1
5
3
-0.03
0.00
0
160
4
5
0
-0.03
0.00
0
161
2
5
2
-0.03
0.00
0
162
11
5
-6
-0.03
0.00
0
163
3
5
1
-0.03
0.00
0
164
7
5
-2
-0.03
0.00
0
165
10
5
-5
-0.03
0.00
0
166
18
5
-13
-0.03
0.00
0
167
15
5
-10
-0.03
0.00
0
168
14
5
-9
-0.03
0.00
0
169
20
7
-12
-0.05
0.03
4
170
19
19
0
-0.12
0.00
0
10.07.1999 Таблица 5.1
Разбивочные данные в профиле
кривой на 3571 км + 45 м перегона АНЖЕРСКАЯ-ТАЙГА, путь 3
Номер точки
Вертикальные стрелы изгиба, мм
Исправления профиля, мм
Исправления по уровню, мм
Подъемки, мм
Натура
Проект
Левые
Правые
1
-26
-26
2
0
2
2
2
-18
-20
1
1
3
1
3
-9
-17
3
-11
3
-7
4
-17
-14
20
-16
20
3
5
-20
-17
29
-9
29
20
6
-22
-18
33
-12
33
21
7
-17
-18
29
-4
29
25
8
-12
-18
28
-8
28
19
9
-21
-18
38
-12
38
26
10
-19
-18
44
-11
44
32
11
-19
-18
46
-15
46
30
12
-21
-19
46
-2
46
44
13
-19
-19
42
-14
42
27
14
-14
-19
36
-12
36
23
15
-12
-19
40
-7
40
33
16
-33
-20
58
-10
58
48
17
-26
-20
49
-11
49
37
18
-12
-20
27
-13
27
13
19
-17
-20
21
-8
21
12
20
-6
-20
20
-8
20
12
21
-28
-20
46
-9
46
37
22
-31
-20
57
-3
57
54
23
-20
-20
45
2
47
45
24
-19
-20
33
10
43
33
25
-11
-19
21
6
27
21
26
-16
-19
26
-2
26
23
27
-20
-19
35
1
37
35
28
-22
-19
40
5
46
40
29
-19
-19
40
5
45
40
30
-15
-19
37
-10
37
27
31
-19
-19
42
-6
42
35
32
-22
-19
45
-5
45
40
33
-18
-19
41
-10
41
30
34
-17
-19
38
-4
38
34
35
-12
-19
39
-17
39
22
36
-30
-19
55
-14
55
41
37
-19
-18
48
-11
48
37
38
-18
-17
39
-16
39
22
39
-15
-17
29
-3
29
25
40
-18
-17
23
-9
23
14
41
-6
-17
17
3
20
17
42
-20
-17
35
14
49
35
43
-18
-19
48
4
52
48
44
-29
-22
61
20
82
61
45
-24
-22
60
-8
60
51
46
-25
-22
54
-2
54
52
47
-20
-22
42
1
43
42
48
-12
-21
32
-12
32
20
49
-23
-20
40
г
42
40
50
-20
-20
42
-4
42
38
51
-21
-20
43
-6
43
37
52
-20
-20
41
5
46
41
53
-24
-20
38
-12
38
26
54
-16
-20
26
11
37
26
55
-15
-20
21
-5
21
15
56
-14
-20
25
-14
25
11
57
-27
-20
40
-16
40
23
58
-17
-20
40
-15
40
25
59
-22
-20
46
0
47
46
60
-18
-20
48
-13
48
34
61
-16
-20
53
-3
53
50
62
-33
-20
66
7
73
66
63
-15
-20
54
-14
54
39
64
-24
-20
53
-13
53
39
65
-23
-20
45
-12
45
33
66
-12
-19
32
-7
32
25
67
-14
-17
34
-12
34
22
68
-16
-17
42
-8
42
33
10.07.1999 Таблица 5.2
Номер точки
Вертикальные стрелы изгиба, мм
Исправления профиля, мм
Исправления по уровню, мм
Подъемки, мм
Натура
Проект
Левые
Правые
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
-20
-24
-17
-12
-12
-18
-14
-17
-14
-31
-21
-27
-24
-6
-22
-28
-9
-21
-29
-22
-21
-11
-16
-31
-11
-15
-1
-23
-22
-32
-26
-9
-10
-14
-30
-30
-16
-19
-19
-21
-28
-15
-22
-21
-20
-36
-26
-12
-24
-17
-17
-17
-17
-15
-14
-14
-18
-21
-21
-21
-21
-21
-21
-21
-21
-21
-21
-21
-21
-21
-20
-17
-16
-16
-16
-17
-19
-19
-19
-19
-19
-20
-21
-21
-21
-21
-21
-21
-21
-21
-21
-23
-24
-24
-24
-24
-24
-24
52
57
47
38
38
43
42
41
43
60
59
58
44
24
32
37
28
41
54
49
42
32
42
52
32
24
17
42
58
67
52
23
14
25
49
55
42
39
40
45
48
37
39
42
49
65
55
41
50
59
53
56
52
38
18
14
17
23
31
29
42
55
53
40
33
38
28
31
-1
3
23
19
23
10
-3
3
0
0
0
-10
-5
-11
-5
5
-13
-4
-5
-6
-3
-2
3
-3
-5
5
3
8
3
1
-1
-7
-13
-11
-11
-6
-10
-7
-3
-7
5
-9
-15
-9
-13
6
-12
-12
-6
-9
0
-9
-5
-10
-9
-1
-4
-1
0
0
0
-9
-15
-17
-26
-20
-25
-23
52
60
70
57
61
54
42
44
43
61
60
58
44
24
32
42
28
41
54
49
42
32
45
52
32
29
21
50
61
68
52
23
14
25
49
55
42
39
40
45
53
37
39
42
49
71
55
41
50
59
53
56
52
38
18
14
17
23
31
30
42
55
53
40
33
38
28
31
51
57
47
38
38
43
39
41
43
60
59
47
39
13
27
37
15
37
49
43
38
30
42
48
27
24
17
42
58
67
51
15
1
13
38
49
31
31
37
38
48
28
24
33
36
65
42
28
43
49
53
47
46
27
9
13
12
22
31
29
41
46
37
22
7
18
2
7
-31
-24
-19
-24
-27
-24
-28
-23
-24
-21
-12
-20
-17
-20
-18
-20
-19
-20
-25
-20
-13
-20
-20
-21
-31
-23
-28
-23
-16
-19
-13
-19
-26
-19
-12
-19
-17
-19
10.07.1999 Таблица 5.2
Номер точки
Вертикальные стрелы изгиба, мм
Исправления профиля, мм
Исправления по уровню, мм
Подъемки, мм
Натура
Проект
Левые
Правые
135
-12
-19
28
-25
28
2
136
-17
-19
31
-23
31
7
137
-27
-19
39
-18
39
20
138
-6
-19
30
-19
30
11
139
-29
-19
48
6
54
48
140
-16
-19
44
5
50
44
141
-15
-19
46
-3
46
42
142
-24
-19
56
6
62
56
143
-22
-19
56
2
59
56
144
-24
-19
51
11
62
51
145
-11
-19
36
-4
36
32
146
-18
-18
38
-2
38
36
147
-21
-18
41
0
41
41
148
-14
-18
37
2
39
37
149
-15
-18
41
12
53
41
150
-23
-18
51
0
51
50
151
-22
-17
49
-3
49
46
152
-18
-16
37
-2
37
35
153
-7
-16
21
0
21
21
154
-19
-16
24
10
34
24
155
-15
-16
22
-6
22
16
156
-14
-16
21
0
21
21
157
-17
-16
24
2
27
24
158
-18
-16
26
6
32
26
159
-19
-16
24
3
28
24
160
-12
-17
17
0
18
17
161
-16
-17
19
2
22
19
162
-14
-17
24
-6
24
18
163
-14
-17
34
1
35
34
164
-20
-17
50
-2
50
47
165
-23
-17
58
-5
58
53
166
-15
-16
55
-13
55
42
167
-26
-12
53
-10
53
42
168
-11
-16
22
-9
22
13
169
-5
-17
1
-12
1
-10
170
-21
-21
2
0
2
2
Приложение В
Схемы подключения АС «Навигатор» к выправочным машинам тяжелого типа
Приложение С
ПОЛОЖЕНИЕ
o выправке пути и стрелочных переводов в профиле, плане и по уровню
машинами Дуоматик и Унимат, оборудованными автоматизированными системами
выправки
Общие положения
Машины для высокоточной выправки пути и стрелочных переводов,
оборудованные ав- томатизированными системами (АС) управления
процессами съемки, расчета и постановки ко- лен в установленное
положение являются дорогостоящими, высокопроизводительными средст-
вами механизации трудоемких работ.
От правильной организации и эффективного использования этой техники
зависят важ- нейшие технико-экономические показатели работы путевого
хозяйства.
В настоящее время в ряде случаев возможности машин Дуоматик, Унимат
используются в неполной мере, что не обеспечивает длительной
стабильности пути в хорошем состоянии.
Планово-предупредительная выправка, как правило, выполняется без
постановки пути в параметрическое положение в плане и профиле.
В настоящем документе изложены основные принципы использования
современных машин для высокоточной выправки пути.
Машины, как правило, должны быть приписаны к специализированным
предприятиям по эксплуатации и ремонту путевой техники и работать в
соответствии с годовым планом, ут- вержденным службой пути.
Не плановое использование машин допускается лишь в исключительных
случаях с ве- дома руководства службы пути железной дороги.
Выправка пути должна выполняться комплексом машин, состав которого
определяется принятой технологией производства работ, на
подготовленных соответствующим образом уча- стках.
Выправочные комплексы (далее ВК) предназначены для чистовой выправки
в период отделки пути перед сдачей его в постоянную эксплуатацию
после производства капитальных путевых работ и для выполнения
планово-предупредительных работ при текущем содержании пути.
Основные принципы организации работ
ВК должны использоваться по назначению, со строгим соблюдением
технологии вы- правочных работ в “окна” продолжительностью не менее
4-х часов.
Руководит работой ВК дорожный мастер, знающий настоящее Положение,
принципы работы машин комплекса, их технические возможности,
требования по подготовке пути для ра- боты машин, порядок применения
ВК и правила Приемки пути после завершения выправки.
Дорожный мастер несет ответственность за безопасное производство
работ, своевремен- ное их окончание, соблюдение технологии выправки
в пределах должностных обязанностей и действующих нормативных
документов.
Техническое руководство и инженерное обеспечение работы комплекса
возлагается на инженера-технолога, который должен в совершенстве
знать:
-методы геодезической съемки положения пути в плане и профиле;
-порядок камеральной обработки материалов геодезической и машинной
съемки поло-
жения пути;
-действующие нормативы и порядок их применения при определении
расчетного по- ложения железнодорожного пути;
-порядок использования программных продуктов автоматизированных
систем “Навига-
тор” и АLС при съемке, расчетах и выправке пути;
правила производства путевых работ с применением путевых машин и
требования к обеспечению безопасности движения поездов и техники
безопасности при их производстве;
устройство, назначение и принципы работы машин ВК.
Планирование работ
Планирование работ по выправке пути осуществляется порядком,
определенным Прави- лами и технологией выполнения основных работ при
текущем содержании пути ЦПТ-52, Инструкцией по текущему содержанию
железнодорожного пути ЦП-774 и Техническими условиями на работы по
ремонту и планово-предупредительной выправке пути ЦПТ-51.
Адресные календарные годовые планы работы выправочных комплексов
утверждаются службой пути по результатам осеннего осмотра и работы
средств диагностики, с учетом обоснований, представляемых
дистанциями пути до 1 января. Планы должны быть увязаны с
календарными планами ремонтных работ и ППР. Подготовка планов
осуществляется центром диагностики службы пути.
Планами должно учитываться время, необходимое для стабилизации пути
поездной на- грузкой (при отсутствии ДСП), предварительно
выправленного машинами ВПР, ВПРС после глубокой очистки щебня;
выполнения комплекса подготовительных работ перед работой ВК;
передислокации ВК, которое в результате тщательной проработки
должно быть сведено к минимуму.
При этом каждый участок или набор рядом расположенных участков
работы ВК должен обеспечивать загрузку комплекса не менее 15-дней
без передислокации турных вагонов, с целью исключения
непроизводительных пробегов машин и обеспечения нормальных бытовых
условий обслуживающих бригад.
На период не менее 15-ти дней должно осуществляться оперативное
планирование работ ВК на основе адресных годовых календарных планов
с учетом смены бригад.
Исходя из выше перечисленного и с учетом технических возможностей
ВК, должно быть рассчитано и оформлено необходимое количество
“окон”.
Подготовительные работы
Предварительная съемка и расчет подъемок в профиле, по уровню и
сдвигов в плане про- изводится, как правило, на максимально
возможном или 'всем протяжении выправляемого участка 15-ти дневной
работы.
Участки работы для каждого из планируемых “окон” маркируются на
шпалах и на диа- граммах съемки с привязкой к пикетажу.
Для АС “Навигатор” применяется
исключительно машинная съемка состояния пути с расчетом параметров
выправки пути, как на машине, так и на стационарном компьютере.
Для АС АLС нужны
достоверные данные о параметрах пути в плане и профиле, при их
отсутствии должна применяться тщательная геодезическая подготовка с
использованием специальной реперной системы. В этом случае
достигается постановка пути в расчетное положение, с заданными
геометрическими параметрами.
В любом случае, как для АС “Навигатор”, так и для АС АLC должен
производится тща- тельный промер ширины междупутья, габаритов
расположенных на участке обустройств, обочин земляного полотна и
установлены зоны, где сдвижка или подъемка пути ограничены или
невозможны (переезды, мосты, пассажирские платформы и т. п.).
Требования к состоянию пути, подлежащему выправке
Полнота закрепления промежуточных рельсовых скреплений, эпюра шпал,
состояние бал- ластного слоя, точная настройка систем машины, выбор
режимов подбивки, величина перемеще- ний пути определяют качество
выправки пути и его стабильность.
На пути, подлежащем выправке, должны в обязательном порядке
выполняться следующие работы:
-закрепление с нормативным усилием болта стыковых и промежуточных
скреплений, до- бивка и пополнение до нормы костылей и
противоугонов;
-снятие регулировочных прокладок;
-разрядка, при необходимости, температурных напряжений в рельсовых
плетях или ре- гулировка зазоров на звеньевом пути;
-заменены негодные шпалы и отрегулирована эпюра шпал там, где она
нарушена;
-заложены за клеммы или закреплены на деревянных шпалах обводные
рельсовые со- единители;
-разборка стеллажей покилометрового запаса рельсов, переездных и
пешеходных насти-
лов; сов;
-устранение стыковых неровностей путем правки, наплавки или замены
негодных рель-
-разрыхление или вырезка балласта в шпальных ящиках на отводах, где
подъемка не
превышает 20 мм;
-установка клемм на маячных шпалах;
-ликвидация единичных выплесков;
-уборка засорителей с поверхности балластной призмы обочин и
междупутья (в особен- ности на асбестовом балласте);
-выгрузка в необходимом количестве балластных материалов для
обеспечения расчет- ных подъемок и сдвижек, при этом машинисту
выправочной у машины должна быть обеспече- на видимость клемм или
шпал внутри колеи для прицельного опускания подбивочных блоков;
проведена очистка щебеночного балласта при наличии выплесков в
количестве более
1% шпальных ящиков на участке, предназначенном к выправке;
непосредственно перед “окном” или в начале его отсоединены
заземления опор кон- тактной сети, отсасывающие фидеры (ЭЧ),
дроссельные перемычки (ШЧ);
сняты охранные приспособления на мостах с ездой на балласте и
под путепроводами.
Степень расстройств пути, особенно в вертикальной плоскости,
наиболее существенно влияет на производительность выправки (см.
табл. 1).
Завышение скорости выправки на участках больших, перемещений пути
приводит к снижению качества. Кроме того, на участках с подъемками
более 40 мм необходима предвари- тельная выгрузка балласта.
В местах несовпадения отводов кривизны и возвышения наружного рельса
(далее ВНР), исправления ВНР могут достигать величины 50 мм и более
на длине в десятки метров. Подбив- ка пути с такими подъемками
неэффективна, поэтому участки переустройства ВНР необходимо
выправлять повторно с выгрузкой дополнительного балласта.
Подготовка машин и требования к их работе в процессе выправки
Рекомендуемые режимы управления циклом подбивки на машине Дуоматик в
зависимо- сти от величины максимальных перемещений пути, обеспечивающие
нормативное качество выправки, приведены в таблице I.
Таблица 1.
№
Максимальные перемещения пути, мм
Скорость, м/ч
Параметры цикла
подъемки
сдвижки
1,сек
К (показание прибора)
1.
20
20
1300-1400
0,8
3
2.
30
40
1100-1200
1,0
4
3.
50(40)
60
900-1000
1,6
7
4.
80
100
650
2х1,0
4
5.
80
>100
<500
3х1,0
4
Примечания:
При больших переустройствах ВНР, подъемках >50 мм и сдвижках>60мм
(строки 4 и 5) должна выполняться повторная выправка после
стабилизации пути ДСП или поездной нагрузкой с добавлением балласта.
Неизменные параметры цикла по всей длине участка выправки
обеспечивают равно- мерное уплотнение балласта,
Основные характеристики подбивочных блоков, влияющие на
производительность и ка- чество выправки пути, подлежащие
регулярному контролю, приведены в таблице 2.
Таблица 2
№
Характеристики, влияющие на результаты подбивки
Оптимальные рабо- чие значения
Допускаемые значения
1.
Амплитуда колебаний подбоек
5 мм
4мм
2.
Частота колебаний
35 Гц
3.
Давление подбивки
11.5-12.5 МПа
9.5 МПа
4.
Заглубление верхней части бойков подбоек ниже подош- вы
шпалы
15-20 мм
10мм
5.
Размеры бойков подбоек
80х150 мм
65х120 мм
Амплитуда колебаний подбоек уменьшается вследствие износа
подшипников, этим сни- жается эффективность уплотнения щебня.
При износе бойков подбоек уменьшается временной цикл и снижается
качество выправки
пути.
.Основные требования к циклу выправки
При выправке должно обеспечиваться:
-одинаковое давление сжима с обеих сторон (при нормальной
фракции щебня устанавли- вается давление 115 - 125 бар; на
вновь уложенном или очищенном щебне 90-110 бар; на щебне,
основная часть которого имеет фракцию
40-70 мм, давление увеличивается соответственно на 5-10
бар);
-время сжима при выправке пути на текущем содержании
(уплотненный балласт) 1.0 сек, на вновь уложенном участке
пути 0.8 сек;
-величина заглубления подбоек 20 мм от верхней кромки
лопатки подбойки до нижней постели шпалы;
-начало сжима за 10-20 мм до достижения установленной
глубины подбивки;
-появление небольшого потока балласта в торце обжимаемой
шпалы, а при опускании уп- лотнителя балласта, ход
сокращение на 4 - 6 мм амплитуды сжима подбоек;
-при соударении бойков со шпалой при сжиме, нужно уменьшать
величину давления сжима, если при этом соударение устранить
невозможно, уменьшают время сжима;
- постоянная величина давления рабочей жидкости в
гидроприводе подбивочного блока (100-115 бар в конце сжима),
при значительном падении давления необходимо перейти на
2-3-х кратный сжим.
При нарушении машинистом этих требований руководитель работ
обязан остано- вить работу машины с записью в маршрутном
листе.
Выправка пути превращается инженером-технологом, когда при
заглублении под- бивочных блоков, функция помощи проникания
включается более 2 раз на цикл и носит постоянный характер
на 10-15-ти циклах подряд. Причина остановки,
сверхнормативная загрязненность балласта, отмечается в акте.
.Способы выправки пути штатной системой машин.
Работа “по фиксированным точкам”.
Этот способ выправки применяется при выправке расстройств пути в
плане и профиле после тщательной геодезической подготовки фронта
работ и инженерных расчетов с нанесени- ем параметров выправки на
каждой 5-й шпале.
Машина должна начинать работу с нулевой точки штатной сглаживающей
системой.
Оператор в передней кабине задает вручную задатчиком высоту подъемки
и величину сдвижки по значениям, написанным на шпалах.
Работа с вводом расчетных данных после геодезической съемки в
компьютер машины.
Указанный способ выправки также применяется после тщательной
геодезической подго- товки фронта работ, инженерных расчетов, но
вместо отметки на каждой 5-й шпале, результаты расчетов вводятся в
компьютер с таблицы вручную или с дискеты.
Машина начинает работать после предварительной, обработки
компьютерных данных с размеченной нулевой точки. Величинами сдвижек
и подъемок управляет компьютер.
Работа с применением лазерной системы
Машина работает с установкой лазерной тележки на расстояние до 300 м
(наилучшее обеспечение качества обработки данных). При большой длине
фронта работ, необходимо пере- ставлять лазерную тележку на
последующие точки. Машина возвращается на начальную точку и начинает
работать по лучу.
Порядок производства работ машинами, оборудованными АС
“Навигатор”
Параметры, получаемые в результате съемки, расчета и выправки
пути выправочными машинами с АС “Навигатор” не требуют ввода
каких-либо дополнительных результатов геоде- зической съемки,
привязки к реперной системе, кроме ввода пикетажа и
корректировок в расче- те по результатам измерения габаритов
междупутья и сооружений на участке работ.
Это обусловлено тем, что
-система сама рассчитывает оптимальное пространственной
положение пути для задан- ных условий эксплуатации по данным
непрерывной машинной съемки его натурного положе- ния, исключая
неизбежные ошибки геодезической съемки, субъективного расчета и
ошибок ввода;
-погрешности штатной измерительной системы, как в режиме съемки,
так и в режиме вы- правки пути одинаковы и компенсируют друг
друга;
Кажущаяся простота операции “съемка - расчет - выправка” и
отсутствие у персонала ма- шин и руководителей необходимого
опыта планирования и расчетов машинной выправки способствует
тому, что эти операции, казалось бы, можно выполнять в одно
“окно”, принимая все решения на борту машины.
Однако в условиях дефицита времени “окна” без выполнения
конкретных ограничений по сдвижке и подъемке пути можно нарушить
габариты, оставить пустыми шпальные ящики.
“Экспресс - выправка” допустима лишь в нестандартных ситуациях,
Работа по выправке пути АС “Навигатор” должна быть организована
таким образом, что- бы расчеты (вариантов выправки по данным
предварительной съемки) выполнялись инженером- технологом в
подготовительный период с утверждением принятого варианта
выправки пути руководителем дистанции пути.
Распечатки таблиц и графиков результатов расчетов является
готовым паспортом участка, по этим документам элементы плана
линии должны быть закреплены реперами для дальнейшего
использования их в эксплуатации.
Полученные в результате расчета и выправки:
-возвышение наружного рельса в кривых;
-характеристики элементов плана и профиля;
-допускаемые скорости движения поездов, непогашенные ускорения,
скорости их нарас- тания и скорости подъема колеса на ВИР;
-изменение длин рельсовых нитей при рихтовке пути, т. е.
изменение зазоров, или напря- жений в рельсах и другие данные после
согласования и утверждения их в службе пути должны храниться
как паспортные данные и использоваться в процессе эксплуатации.
.Последовательность операций при машинной выправке пути
с применением АС “Навигатор”
Последовательность и порядок проведения
подготовительных, основных и сопутствую-
щих работ:
-разметка участков пути с закреплением мест ограничений
подъемок и сдвижек;
-предварительная машинная съемка натурного положения
пути с фиксацией точек и зон ограничения подъемок и
сдвижек на шпалах, а также маркерами в диаграмме съемки
на всем протяжении участка выправки;
-расчеты вариантов выправки пути при различных градациях
ограничений подъемок и сдвижек;
-проверка габаритов и достаточности балласта при
расчетных подъемах и сдвижках;
-утверждение варианта выправки пути и его
документирование;
-выполнение подготовительных работ в соответствии с п.4
настоящего Положения;
-машинная выправка пути по утвержденному варианту
расчетов;
-контроль результатов выправки по датчику контрольной
стрелы прогиба.
Съемка натурного положения пути
Машинная съемка натурного положения пути
осуществляется в специально запланиро- ванные “окна”
продолжительностью не менее 1 часа на участках
длинной 2 и более км не менее, чем за сутки до
начала выправки пути на этом участке,
До начала измерительной поездки руководитель работ
обеспечивает маркировку пути с закреплением на шейке
рельса и шпалах:
-точек начала и конца участка;
-километровых и пикетных знаков (с выверкой пикетажа
по продольному профилю или промером мерной лентой),
расстояние между маркерами должно быть не более 200
м,
-мест расположения устройств и сооружений,
ограничивающих перемещение пути по габаритному
состоянию или иным причинам.
В ходе измерительной поездки маркеры путевой
разметки вводятся оператором в ком- пьютер для
последующего учета в расчетах и синхронизации
программного задания при вы- правке, для чего
руководитель работ передает оператору расшифровку
вводимых маркеров.
Скорость при измерительной поездке до 10 км/час на
бесстыковом пути и до 5 км/час на звеньевом
(ограничение по устойчивости тележек измерительной
системы).
Контрольная съемка результатов выправки должна
осуществляется строго в пределах границ выправленных
участков по имеющейся путевой разметке для
масштабной сопоставимо- сти предварительной съемки и
результатов работы.
Расчеты программных заданий на выправку пути
Расчеты оптимального пространственного положения
пути для построения программно- го задания на
выправку выполняются инженером-технологом с
последующим утверждением принятого варианта расчета
руководителем дистанции пути.
Варианты расчетов зависят от различных градаций
величины допускаемых максималь- ных перемещений
пути, устанавливаемых по габаритам и результатам
осмотра Принятый вари- ант должен иметь минимальное
количество элементов плана и профиля при минимальных
объ- емах выправочных работ.
Распечатки таблиц и графиков утвержденного варианта
расчетов заносятся в паспорт дистанции пути, а их
копии передаются руководителю работ для Проведения
комплекса подго- товительных и сопутствующих работ с
учетом результатов натурного осмотра.
Выправка пути
Машинная выправка пути с применением АС “Навигатор”
осуществляется в автомати- ческом режиме под контролем
оператора.
Оператор дает рекомендации машинисту по изменению параметров
цикла в зависимости от изменения подъемок и при помощи
задатчиков на компьютере, компенсируя неравномерную усадку пути
по показаниям контрольного маятника (не
допускается одновременное использо- вание штатных и программных
задатчиков подъемок машинистом и оператором).
После окончания выправки руководитель работ анализирует графики
показаний кон- трольного мятника превышения, датчика стрелы
прогиба в плане и результаты собственных промеров. В случае
необходимости, обеспечивает исправление остаточных расстройств в
мес- тах недостатка балласта с его дозировкой.
Порядок производства работ машинами, оборудованными АС АLС
Работа автоматизированной системы АLС
основана на электронном сглаживании из- меренных машиной
стрел прогиба в плане и профиле.
Машиной производится измерительная поездка по всему фронту работ
с записью дан- ных и последующей обработкой, но не более 2000 м,
что вызвано техническими возможностями компьютера и программного
обеспечения (на машинах выпуска до 2001 года).
Машина производит измерительную поездку, съемку с замером
фактического состояния пути в плане, продольном профиле и по
уровню.
По возвращении к исходной точке микропроцессорная система по
заданию оператора производит определение сдвигов и подъемок пути
и составляется программное задание на выправку пути.
Определение сдвигов и подъемок осуществляется путем усреднения
на графическом изображении графика стрел. Это предъявляет
повышенные требования к квалификации инженера-технолога и тем
более машиниста, так как в сложных кривых с зарихтованными
переходными кривыми достаточно сложно определить по графику
параметры кривой.
При задействовании выправочной, рихтовочной нивелировочной
систем машиной произ- водится выправка измеренного участка пути.
Задание на выправку и ведомости подъемок и сдвижек по методу
фиксированных точек, после геодезической подготовки, выдаются
бригаде машины не позднее 2 часов до начала “окна”.
8.1.Порядок производства работ машинами, оборудованными АС АLС
Работа по выправке пути АС АLС должна быть организована после
утверждения руково- дителем дистанции пути расчетов,,
выполненных на основе геодезической съемки или определе- ния по
результатам измерительной поездки варианта выправки.
Возвышения наружного рельса в кривых, если по расчету они
изменяются, должны быть согласованы и в последующем утверждены в
службе пути.
8.2. Съемка натурного положения пути
При работе методом электронного сглаживания системой АLС.
До начала измерительной поездки руководитель работ обеспечивает
маркировку пути с закреплением на шейке рельса и шпалах:
-достоверных данных об элементах плана и профиля пути;
-точек начала и конца участка работ;
-километровых и пикетных знаков (с выверкой пикетажа по
продольному профилю или промером мерной лентой);
-мест расположения устройств и сооружений, ограничивающих
перемещение пути по га- баритному положению или иным причинам,
В ходе измерительной поездки маркеры путевой разметки вводятся
оператором в компь- ютер для последующего учета в расчетах и
синхронизации программного задания при выправке, для чего
руководитель работ передает оператору соответствующие материалы.
8.3.Определение программных заданий и выправка пути
Определение оптимального пространственного положения пути для
построения про- граммного задания на выправку выполняются
инженером-технологом по диаграммам съемки с последующим
утверждением принятого варианта руководителем дистанции пути.
После окончания выправки руководитель работ анализирует графики
показаний кон- трольного маятника превышения, контрольного
датчика стрелы прогиба и результаты собствен- ных промеров. В
случае необходимости, обеспечивает исправление остаточных
расстройств и местах нехватки балласта с его дозировкой.
Особенности определения программных заданий для машин,
оборудованных АLС:
-при обработке результатов измерительной поездки в особенности
на бесстыковом пути следует избегать односторонних сдвижек,
вызывающих дополнительные внутренние напряжения рельсовой плети;
-на выправку пути с измерительной поездкой в задании
устанавливается величина сте- пени сглаживания (количество
циклов последовательного электронного сглаживания). Реко-
мендуемые режимы сглаживания приведены в таблице 3.
Таблица 3
Диапазон скоростей движения км/час
Диапазон степени сглаживания
До 100
10-15
101-120
15-20
121-140
20-25
141-160
25-30
161-200
Более 30
Особенности работы машин Унимат с АС “Навигатор”
При организации работ машины Унимат в пределах стрелочной горловины
следует иметь в виду,.что выправлять в плане и профиле отдельно взятый
стрелочный перевод без рас- чета геометрии, соответствующей подготовки и
комплексной выправки всех стрелочных пере- водов горловины и путей
примыкания неэффективно.
'Это следует из того, что при съемке машиной одного стрелочного перевода
с отводами на участке общей длиной 100 м не выявляются параметры даже
одного минимального элемента плана или профиля.
Поэтому перед работой такой машины должна быть произведена тщательная
геодезиче- ская подготовка и расчет положения стрелочной горловины в
плане и профиле, после чего при- нимается решение о выправке всех или
части стрелок с разбивкой элементов :плана и профиля и при необходимости
устройства временных отводов.
Отдельный подход в расчетах должен быть осуществлен к стрелочному
переводу, распо- ложенному в кривом участке пути, с учетом его рихтовки
в прямое положение, либо макси- мального уположения радиуса кривой, в
которой он расположен.
АС “Навигатор” (существующая версия) применима с целью выправки профиля
и плана одного или нескольких направлений горловины, в этом случае:
-производится съемка каждого направления в отдельности в пределах всей
горловины, с отводами необходимой по состоянию плана и профиля длины;
-порядок расчета в данном случае аналогичен расчету величин сдвигов и
подъемок для машины Дуоматик с АС “Навигатор”.
Особенности принятия решения по варианту расчета:
-по предварительному расчету сдвиги и подъемки должны быть вынесены на
путь с тем, чтобы можно было в натуре определить рациональность и
техническую возможность этих пе- ремещений по отношению к плану, профилю
и особенно длине съездов;
-принимается решение об очередности выправки каждого из главных
направлений. Перечень дополнительных ограничений при работе в горловине:
-необходимо сохранять параллельность путей в пределах съезда, иначе на
съезде может
образоваться угол, который на коротком съезде невозможно превратить в
нормальную кривую;
- перед
выправкой необходимо тщательно выставить ординаты в переводной кривой.
Рихтовка ведется только по прямому направлению, а на переводной и
закрестовинной кривых рихтовка на брусьях должна быть выключена;
-необходимо стремиться к постановке направлений, соединенных съездами,
на одинако-
вые высотные отметки;
-в ящике с переводными тягами после работы машины брусья подбиваются
вручную, с добавлением балласта на высоту, обеспечивающую работу привода
в летний период.
Приложение D
Результаты приемочных испытаний автоматизированной системы «Навигатор»
на машине Duomatic 09-32 CSM
Выписка из технического заключения ИП-18-01-04 ГУП ВНИТИ МПС РОССИИ от
15 мая 2001 г.
Результаты приемочных испытаний автоматизированной системы
«Навигатор» на машине Duomatic 09-32 CSM
Приемочные испытания автоматизированной системы выправки пути
«Навигатор» про- ведены в сравнении с АС «ALC» фирмы «Плассер и Тойер» в
соответствии с указанием МПС России №С-28-14 от 22.03.2001 г. в условиях
ПЧ-11, ст. Георгиевск Северо-Кавказской ж.д. АС были установлены
соответственно на машинах Дуоматик 09-32 № 13 совместного производства
ГУП КЗ «Ремпутьмаш» и фирмы «Плассер и Тойер» и №2783 – чисто
австрийского производ- ства.
По результатам испытаний АС «Навигатор» превосходит АС «ALC» и
обеспечивает сле- дующие характеристики:
Характеристики
№ 13 «Навигатор
№2783 «ALC»
Коэффици- ент улуч- шения
Производительность при работе в одина- ковых условиях, шп/ч
19572183
14671654
1,33 –1,32
Устранение просадок (лощин) глубиной, мм
до 50
не обеспечивалось
Средняя плавность пути:
0,65
1,02
1,57
по профилю �i,
%о
по уровню у,
мм
0,90
1,21
1,34
в плане �f,
мм
1.11
1,44
1,30
Средняя точность выправки пути по
89,4
77,1
1,16
проценту точек, входящих в допуски, %
�i 1,0
�i 2,0
87,5
80,5
1,09
�i>
2,0
91,3
93,9
1,03
Точность установки возвышения наруж- ной рельсовой нити в
круговой кривой, мм
1,00,76
1,20,82
1,15
Точность поддержания стрел изгиба в круговой кривой, мм
1,03
1,39
1,35
Возможность совмещения начала и конца переходной кривой по
возвышению и в плане, м
До 0
до 10
Средняя точность машинной записи по- ложения пути по
сравнению с инструмен- тальными измерениями: