Обозначение элементов схемы........................
Жизненный цикл пневматической системы..............
Глава 5. Схемы с одним исполнительным устройством
Прямое управление цилиндром......................
Пример 1. Прямое управление цилиндром одностороннего
действия...............................
Упражнение 1. Прямое управление цилиндром двустороннего
действия..............................
Непрямое управление цилиндром......................
Пример 2. Непрямое управление цилиндром одностороннего
действия.............................
Упражнение 2. Непрямое управление цилиндром двустороннего
действия............................... 5.7. Логические функции
"И" и "ИЛИ".......................
5.8. Пример 3. "И"- функция...............................
Настоящая книга является составной частью учебного комплекса "Средства
автоматизации и коммуникации" фирмы Фесто Дидактик КГ. Учебник
предназначен для занятий на семинарах и для самообучения.
Книга состоит из:
Вводного курса (часть А)
Основ теории (часть В)
Решений задач (часть С)
Часть А. Вводный курс
Вводный курс иллюстрирует необходимую информацию по теме с помощью
примеров и упражнений. Он должен прорабатываться последовательно шаг
за шагом. Углубленному изучению темы способствуют ссылки на
соответствующие разделы части В.
Часть В. Основы теории
Эта часть содержит материал для углубленной проработки основ
пневмоавтоматики. Здесь читатель найдет темы, упорядоченные в
логической последовательности. Данную часть книги можно использовать
для повышения уровня теоретической подготовки или как справочный
материал.
Часть С. Решения
В этой части представлены решения задач, поставленных в вводном
курсе учебника. В заключительной части книги приведен подробный
указатель терминов.
Учебник ориентирован на поддержку обучения по основным новым
специальностям в области металлообработки и электротехники.
Часть А ВВОДНЫЙ КУРС
Глава 1
Введение в пневмоавтоматику
Обзор
Пневматические устройства давно играют важную роль в
механизации производства. В последнее время они также широко
используются при решении задач автоматизации.
Пневматические устройства в системах автоматики выполняют
следующие функции:
получение информации о состоянии системы с помощью входных элементов
(датчиков);
обработка информации с помощью логико-вычислительных элементов
(процессоров);
управление исполнительными устройствами с помощью распределительных
элементов (усилителей мощности);
совершение полезной работы с помощью исполнительных устройств
(двигателей).
Для управления состоянием и рабочими процессами машин и установок
необходимы системы со сложными логическими связями, которые
обеспечиваются благодаря взаимодействию датчиков, процессоров,
исполнительных устройств и рабочих механизмов с пневматическими или
частично пневматическими устройствами.
Технический прогресс в области создания материалов, способов
конструирования и производства также способствовал улучшению
качества и увеличению разнообразия пневматических устройств, что
послужило основой для расширения области их применения как средств
автоматизации.
Для реализации прямолинейного движения часто используются
пневмоцилиндры, т.к. они характеризуются низкой стоимостью,
легкостью монтажа, простотой и прочностью конструкции, а также
широким диапазоном основных параметров.
Ниже приводится диапазон главных параметров пневматических
цилиндров:
диаметр поршня 6...320 мм
ход поршня 1...2000 мм
развиваемое усилие 2...50000 Н
скорость поршня 0,02... 1,5 м/с
Рис. 1.1. Цилиндр одностороннего действия
Пневматические исполнительные устройства могут реализовывать
следующие виды движения:
прямолинейное (возвратно-поступательное),
поворотное (возвратно-поворотное),
вращательное движение (ротация).
Ниже представлены несколько примеров применения пневматических
устройств:
манипуляторная техника:
зажим деталей,
передвижение деталей,
позиционирование деталей,
ориентирование деталей,
распределение потоков материалов;
производственные операции:
упаковка,
индикация,
дозировка,
фиксация,
поворот и переворачивание,
открытие и закрытие дверей,
транспортировка материалов,
вращение деталей,
сортировка деталей,
складирование деталей,
тиснение и прессование деталей.
Рис. 1.2. Переключение стрелкой двух транспортеров
Рис. 1.3. Роликовый нож с пневматическим приводом
Пневматические системы используются в технологических процессах:
сверления,
токарной обработки,
фрезерования,
пиления,
доводки,
формовки,
контроля качества.
Таблицы характеристик пневмосистем
Отличительные особенности и преимущества систем пневмоавтоматики
представлены в таблице 1.1.
Доступность воздуха
Воздух имеется практически везде в неограниченном
количестве
Транспортабельность воздуха
Воздух может легко транспортироваться по трубам на
большие расстояния
Способность
к аккумулированию
Сжатый воздух может накапливаться в резервуарах и
использо- ваться по мере необходимости, а резервуары
могут легко транс- портироваться
Нечувствительность к температуре
Сжатый воздух относительно нечувствителен к колебаниям
температуры. Это гарантирует надежную работу
пневмосистем даже в экстремальных условиях.
Взрывобезопасность
Сжатый воздух практически взрыво- и пожаробезопасен, что
не требует дорогостоящей защиты.
Экологическая чистота
Сжатый воздух без специально распыленного в нем масла не
загрязняет окружающую среду.
Простота конструкции
Пневмоэлементы просты в производстве и поэтому недороги.
Высокая скорость
Сжатый воздух перемещается с большей скоростью. Это
позволяет получить высокую скорость движения поршня и
малое время переключения.
Нечувствительность к перегрузкам
Пневматические инструменты и исполнительные устройства
не боятся перегрузки и поэтому могут нагружаться вплоть
до полной остановки.
Таблица 1.1. Особенности и преимущества систем пневмоавтоматики
Для того, чтобы точно определить области применения пневмосистем,
необходимо также знать и их недостатки, которые представлены в
таблице 1.2.
Подготовка сжатого воздуха
Сжатый воздух должен быть хорошо подготовлен. Иначе
возникает опасность быстрого износа пневмоустройств
из-за наличия в нем твердых включений и конденсата воды.
Сжимаемость воздуха
Сжатый воздух не позволяет получить равномерную и
постоянную скорость поршня.
Ограничения по усилию
Сжатый воздух является экономически выгодным только до
определенных давлений. При обычно применяемом
производственном давлении 600...700 кПа (6...7 бар) и в
зависимо- сти от хода и скорости поршня эта граница
лежит в области 40000...50000 H.
Уровень шума
Сброс воздуха в атмосферу сопровождается сильным шумом.
Эта проблема решена в настоящее время благодаря
применению звукопоглощающих материалов и глушителей
шума.
Таблица 1.2. Недостатки систем пневмоавтоматики
При выборе сжатого воздуха в качестве рабочей среды проводится
сравнение свойств пневмосистемы с системами управления,
использующими другие виды энергии. Это сравнение должно
производиться для всей системы, включая информационную систему
(датчики), логико- вычислительную подсистему (процессор) и
исполнительную подсистему (распределитель энергии и исполнительное
устройство). При этом должны приниматься во внимание такие факторы
как:
требования к выходным характеристикам,
сочетаемость с другими подсистемами,
имеющееся оборудование,
наличие кадров, владеющих специальными знаниями.
Критерии выбора источника энергии для исполнительной части системы
В качестве источников энергии в исполнительной части системы
используются:
электрический ток,
7
жидкость,
сжатый воздух,
комбинации перечисленных сред.
Критерии выбора и характеристики системы, принимаемые во внимание при
выборе источников энергии исполнительной части системы:
развиваемое усилие,
рабочий ход,
вид движения (поступательное, поворотное, вращательное)
скорость,
габариты,
долговечность,
надежность и безопасность,
стоимость энергии,
удобство эксплуатации,
аккумулируемость.
Критерии выбора источника энергии для управляющей части системы
В качестве источника энергии в управляющей части системы
используются:
механические устройства,
электрический ток,
жидкость,
сжатый воздух.
Критерии выбора и характеристики системы, принимаемые во внимание
при выборе источника энергии для управляющей части системы:
надежность работы составных частей,
чувствительность к изменениям условий окружающей среды,
простота обслуживания и ремонта,
быстродействие элементов,
скорость прохождения сигналов,
габариты,
долговечность,
возможность модификации системы,
затраты на обучение персонала.
Критерии проектирования пневматической системы управления
Пневматические средства автоматики включают следующие группы
изделий:
исполнительные устройства,
датчики и входные устройства,
логико-вычислительные элементы (процессоры),
вспомогательные устройства,
модули системы управления.
При проектировании пневматических систем управления должны
приниматься во внимание следующие основные требования:
надежность,
удобство ремонта и обслуживания,
стоимость запасных частей,
простота монтажа и соединений,
соразмерность стоимости по отношению к предшествующей системе,
взаимозаменяемость и адаптируемость,
компактность конструкции,
экономичность,
наличие технической документации.
Пневматическая система состоит из цепи элементов различных групп,
соединенных между собой определенным образом.
Структура пневматической системы и последовательность
прохождения сигнала
Рис. 1.4. Последовательность прохождения сигнала
Эти элементы формируют цепь управления для прохождения сигнала
(информации) от входа системы (со стороны управляющей части) к ее
выходу (к исполнительной части).
Усилитель мощности управляет исполнительным элементом с помощью
сигнала, принимаемого от логико-вычислительного устройства
(процессора).
Элементы пневматической системы группируются по подсистемам:
исполнительная подсистема (управляющий распределитель и
исполнительное устройство).
Элементы системы изображаются с помощью условных графических
обозначений, а представление о функциональном назначении элементов
дает схема их соединений.
Рис. 1.5. Схема пневматической системы управления
Распределители могут применяться как входные элементы,
логико-вычислительные элементы или усилители мощности. Пример
взаимосвязи в пневматической системе элементов различного
функционального назначения представлен на рис.1.6.
Рис. 1.6. Принципиальная схема пневматической системы управления
Глава 2
Элементы пневматических систем
Производство и распределение сжатого воздуха
Подсистема энергоснабжения должна обеспечивать
пневматическую систему сжатым воздухом определенного
качества в достаточном количестве.
С помощью компрессора воздух сжимается и дальше передается в
систему трубопроводов воздуха. Чтобы качество сжатого
воздуха соответствовало установленному стандарту, он
проходит через аппаратуру подготовки воздуха.
Для того чтобы уменьшить риск появления неисправностей в
системе, необходимо принять во внимание:
расход потребляемого воздуха,
тип компрессора,
рабочее давление в системе,
рабочий объем пневмоаккумулятора,
требования к чистоте воздуха,
возможность минимизации влажности воздуха с целью снижения процессов
коррозии и вероятности залипания подвижных частей в пневмоэлементах,
требования к системе смазки,
возможность снижения влияния температуры воздуха на работу системы,
соответствие размеров проходных сечений трубопроводов и
пневмоэлементов,
соответствие материалов условиям работы системы и параметрам
окружающей среды,
места расположения точек дренажа и сброса в распределительной
пневмосистеме,
пространственное расположение системы распределения воздуха.
Как правило, пневмоэлементы выбираются на максимальное давление
800...1000 кПа (8...10 бар), однако на практике из экономических
соображений рекомендуется работать с давлением 500...600 кПа
(5...6атм). Для того, чтобы обеспечить заданный уровень давления, с
учетом потерь давления внутри системы распределения воздуха,
компрессор должен выдавать воздух с давлением 650...700 кПа
(6,5...7,0 бар).
Для снижения колебаний давления в системе должен устанавливаться
аккумулятор сжатого воздуха. Компрессор наполняет аккумулятор
сжатого воздуха, который также выполняет функции источника рабочей
среды под давлением.
Внутренний диаметр труб системы распределения воздуха должен
выбираться таким образом, чтобы потери давления на участке от
компрессора до потребителя давления не превышали, в идеальном
случае, 10 кПа (0,1 бар). На выбор диаметра трубопровода влияют:
расход воздуха,
длина трубопровода,
допустимые потери давления,
рабочее давление,
число местных сопротивлений в трубопроводе.
Рис. 2.1. Система подготовки воздуха
Чаще всего главный трубопровод выполняется в виде кольца. При
кольцевой прокладке трубопровода в случае больших расходов воздуха
обеспечивается более равномерная подача. Трубопровод должен
располагаться с уклоном 1...2 % по направлению течения воздуха. Это
особенно важно для тупиковых трубопроводов. Конденсат должен
отбираться из самого низкого места системы. Для горизонтальных
трубопроводов ответвление для отбора воздуха должно устанавливаться
только на верхней стороне главного трубопровода.
Ответвление для отбора конденсата должно устанавливаться на нижней
стороне главного трубопровода.
С помощью запорного вентиля можно отключить часть трубопровода
сжатого воздуха, если она не нужна или на ней должны быть проведены
работы по ремонту и обслуживанию.
Блок подготовки воздуха обычно состоит из:
фильтра сжатого воздуха (с влагоотделителем)
регулятора давления.
Для обеспечения работы исполнительной части системы управления может
использоваться маслораспылитель.
Выбор комбинации этих устройств, их размеров и конструкции
определяется областью, применения и техническими требованиями к
системе. Для того чтобы гарантировать нужное качество воздуха для
каждой установки, блок подготовки воздуха устанавливается в каждую
систему управления.
Рис. 2.2. Блок подготовки воздуха
Фильтр сжатого воздуха
Фильтр сжатого воздуха предназначен для удаления из сжатого воздуха
твердых включений, а также конденсата. Воздух протекает через
тангенциально размещенные в корпусе фильтра шлицевые отверстия.
Здесь благодаря центробежным силам капли жидкости и крупные твердые
частицы отделяются от потока воздуха и собираются в нижней части
корпуса фильтра. Объем собранного конденсата не должен превышать
максимально допустимого уровня, так как иначе конденсат будет снова
вовлекаться в поток воздуха.
Регулятор давления
Регулятор давления предназначен для поддержания рабочего давления в
системе (выходного давления) независимо от колебаний давления в
линии питания (входного давления) и потребляемого расхода воздуха.
Маслораспылитель
Маслораспылитель предназначен для обогащения воздуха дозированным
количеством масла, если это необходимо для функционирования
пневматической установки.
Пневмоаппараты
Пневмоаппараты предназначены для управления давлением и
расходом воздуха. В зависимости от назначения они
подразделяются на следующие категории:
распределители: информационные (входные) устройства,
логико-вычислительные устройства и усилители мощности,
обратные клапаны,
регуляторы расхода,
клапаны давления,
запорные вентили.
Распределитель управляет процессом прохождения пневматического
сигнала давления или расхода воздуха. Он запирает, открывает или
изменяет направление движения сжатого воздуха.
Распределители различаются:
по числу присоединенных линий: 2-линейные, 3-линейные, 4-линейные и
т.д.;
по числу позиций переключения: 2-позиционные, 3-позиционные и т.д.
по способу приведения в движение: с мускульным управлением, с
механическим управлением, с пневматическим управлением, с
электрическим управлением;
по способу возврата в исходное положение: с пружинным возвратом, с
возвратом при помощи давления.
Например, входные устройства могут управляться с помощью роликового
рычага для того, чтобы опрашивать положение штока поршня.
Рис. 2.3. 3/2-распределитель с роликовым рычагом, 3/2-распределитель
с ломающимся роликовым рычагом
В качестве логико-вычислительного устройства распределитель
используется, например, для выключения или включения выходного
сигнала, которое осуществляется под действием входного сигнала.
Рис. 2.4. Пневматический 3/2-распределитель с односторонним
пневматическим управлением и пружинным возвратом
Рис. 2.5. Пневматический 5/2-распределитель с двусторонним
пневматическим и вспомогательным ручным управлением
Обратный клапан
Обратный клапан обеспечивает прохождение воздуха только в одном
направлении. Этот принцип находит применение, например, в клапанах
быстрого выхлопа или логических элементах "ИЛИ". Обратный клапан как
базовый элемент используется и в других типах клапанов, которые
представлены на рис. 2.6.
Рис. 2.6. Обратный клапан и другие клапаны, построенные на его базе
Регуляторы расхода
Регулятор расхода или дроссель запирает или дросселирует поток и тем
самым управляет расходом сжатого воздуха. В идеальном случае можно
регулировать дроссель бесступенчато: от полного открытия до полного
закрытия. Дроссель должен устанавливаться, по возможности, в
непосредственной близости от исполнительного устройства и
регулироваться по мере необходимости в ходе эксплуатации. Если
параллельно с дросселем включить обратный клапан, тогда в одном из
на- правлений будет ограничиваться расход воздуха, а в
противоположном направлении расход будет максимальным.
Рис. 2.7. Дроссели
Клапаны давления
Различают три типа клапанов давления:
предохранительные клапаны,
редукционные клапаны,
клапаны последовательности давления (реле давления).
Предохранительные клапаны устанавливаются в напорной магистрали
компрессора, обеспечивая безопасность его работы. При этом на
заданном уровне безопасности ограничивается давление в аккумуляторе
сжатого воздуха и поддерживается необходимое значение давления
питания пневмосети.
Редукционный клапан поддерживает давление питания пневмосистемы на
постоянном уровне независимо от колебания давления в сети, т.е. в
напорной магистрали компрессора.
Клапан последовательности (реле давления) вырабатывает релейный
сигнал на своем выходе, если давление на его входе достигает
определенного уровня (уровня давления настройки).
Если давление управления достигнет заданного уровня, то в реле
давления, представленном на рис. 2.8., переключится
3/2-распределитель. Если давление управления станет ниже давления
настройки,
то 3/2-распределитель переключится в исходное состояние.
Пневматические модули
При сочетании различных элементов можно получить устройства с новыми
функциями управления. В качестве примера можно привести клапан
выдержки времени. Комбинация из дросселя с обратным клапаном,
пневмоемкости и 3/2-распределителя позволяет реализовать функцию
выдержки времени (реле времени).
Рис. 2.9. Клапан выдержки времени
В зависимости от настройки дроссельного винта в емкость поступает
больший или меньший расход воздуха. После достижения необходимого
давления срабатывания 3/2-распределитель включается на проход
воздуха. Он остается в этом положении до тех пор, пока действует
сигнал управления.
К другим модулям, в состав которых входит несколько клапанов
относятся, например:
устройства управления с двумя входами,
задатчики тактов,
тактовые цепочки,
устройства памяти.
Логико-вычислительные элементы (Процессоры)
Для логической обработки выходного сигнала информационных
элементов используются различные релейные элементы,
например:
логический "И"- элемент,
логический "ИЛИ"-элемент.
Логический элемент "ИЛИ" может реализовать "ИЛИ"-функцию двух
входных сигналов. "ИЛИ"-элемент имеет два входа и один выход.
Выходной сигнал появляется тогда и только тогда, когда имеется
давление хотя бы на одном входе.
Рис. 2.10. Логический "ИЛИ"-элемент
Дальнейшее развитие пневматических процессоров, осуществляющих
обработку информации, идет по пути создания модульных систем,
которые объединяют в одном блоке распределители и логические
элементы. Это уменьшает размеры, стоимость и затраты на монтаж.
Рис. 2.11. Модульное устройство обработки информации (Тактовая
цепочка)
Исполнительные устройства
Энергетическая часть системы содержит управляющий
распределитель (усилитель мощности) и исполнительное
устройство. В группу исполнительных устройств входят
приводы, реализующие поступательное и вращательное движение
выходного звена. Исполнительные устройства управляются от
усилителя мощности, который подает необходимый для
совершения работы воздух. Обычно управляющий распределитель
(усилитель мощности) устанавливается на главной магистрали
питания воздухом для того, чтобы потери энергии были
минимальными.
Рис. 2.12. Исполнительное устройство с управляющим
распределителем
Исполнительные устройства можно разделить на группы:
приводы поступательного движения (линейные приводы)
цилиндры одностороннего действия,
цилиндры двустороннего действия;
приводы вращательного движения (ротационные приводы)
пневмомоторы,
поворотные приводы.
Рис. 2.13. Линейный и поворотный цилиндры
Пневматическая система
Постановка задачи.
В общем случае управление цилиндром осуществляется с помощью
управляющего распределителя. При этом выбор распределителя
(число линий, число положений переключения и способ управления
перемещениями) зависит от каждой конкретной задачи.
Управление цилиндром одностороннего действия
Шток поршня цилиндра одностороннего действия должен выдвигаться
при нажатии пневмокнопки и автоматически возвращаться в исходное
положение, если пневмокнопка отпускается.
Решение.
Управление цилиндром одностороннего действия осуществляется от
3/2-распределителя с ручным приводом. Если пневмокнопка нажата,
то распределитель переключается из исходного положения в
положение "Питание включено".
Пневмосистема состоит из:
цилиндра одностороннего действия с пружинным возвратом,
3/2-распределителя с ручным управлением и пружинным возвратом,
линии питания, присоединенной к 3/2-распределителю,
пневмолинии между распределителем и цилиндром.
Рис. 2.14. Управление цилиндром одностороннего действия
3/2-распределитель имеет три линии (канала): линию питания, рабочую
(выходную) линию и линию выхлопа (сброса).
Коммутация между этими линиями определяется позицией (положением)
распределителя. Возможные положения переключения изображены на рис.
2.14.
Исходное положение
Исходное положение (рис. 2.14, слева) - положение, которое принимает
система, если все коммуникации подведены, и ручное управление
находится в состоянии "Выключено". В состоянии "Выключено" канал
питания распределителя перекрыт и шток поршня цилиндра (под
воздействием возвратной пружины) втянут. В этом положении
распределителя поршневая полость соединена с окружающей средой.
Кнопка нажата
При нажатии кнопки запорный орган 3/2-распределителя переключается в
новое положение, сжимая пружину. На схеме (рис.2.14., справа)
распределитель показан в рабочем положении. В этом состоянии канал
питания через распределитель соединен с поршневой полостью цилиндра.
При этом рабочее давление действует против силы возвратной пружины
поршня, выдвигая шток. Если шток
поршня достигает своего выдвинутого (переднего) конечного положения,
то в поршневой полости цилиндра устанавливается максимальное
значение давления воздуха, равное давлению питания.
Кнопка отпущена
Как только кнопка отпускается, возвратная пружина распределителя
возвращает его в исходное положение и шток поршня втягивается.
Примечание
Скорости выдвижения и втягивания штока поршня в общем случае будут
разными. Причинами этого являются:
сила сопротивления пружины, действующая при выдвижении штока,
сопротивление течению воздуха при его движении через распределитель.
Обычно для цилиндров одностороннего действия скорость выдвижения
больше, чем скорость втягивания.
Управление цилиндром двустороннего действия
Постановка задачи.
Шток поршня цилиндра двустороннего действия должен выдвигаться при
нажатии пневмокнопки и должен автоматически возвращаться в исходное
положение, если пневмокнопка отпускается.
Цилиндр двустороннего действия может совершать работу при движении в
обоих направлениях, так как давление питания может быть подано в обе
полости цилиндра для выдвижения или втягивания штока.
Решение.
Управление цилиндром двустороннего действия осуществляется с помощью
4/2-распределителя с ручным управлением. Распределителем должен
выдаваться или сниматься сигнал, если пневмокнопка соответственно
нажата или отпущена. Схема системы состоит из:
цилиндра двустороннего действия,
4/2-распределителя с ручным управлением и пружинным возвратом,
линии питания, присоединенной к 4/2-распределителю,
пневмолиний между распределителем и цилиндром.
Рис. 2.15. Управление цилиндром двустороннего действия
Исходное положение
Исходное положение (рис 2.15, слева) - положение, которое принимает
система, если все коммуникации проведены и ручное управление
находится в состоянии "Выключено". В состоянии "Выключено" штоковая
полость цилиндра соединена с каналом питания, а поршневая полость -с
окружающей средой.
Кнопка нажата
При нажатии кнопки запорный орган 4/2-распределителя переключается в
новое положение, сжимая пружину. На схеме (рис.2.14, справа)
распределитель показан в рабочем положении. В этом состоянии канал
питания через распределитель соединен с поршневой полостью цилиндра,
а штоковая полость - с окружающей средой. При этом рабочее давление
в поршневой полости обеспечивает выдвижение штока поршня. Если шток
поршня достигает своего выдвинутого (переднего) конечного положения,
то в поршневой полости цилиндра устанавливается максимальное
значение давления, равное давлению питания.
Кнопка отпущена
Как только кнопка отпускается, возвратная пружина распределителя
возвращает его в исходное положение. Штоковая полость соединяется с
каналом питания, и шток втягивается. Воздух из поршневой полости
вытесняется в окружающую среду.
Примечание
Скорости выдвижения и втягивания штока поршня в общем случае будут
неодинаковыми. Причиной этого является то, что объем поршневой
полости цилиндра больше, чем объем штоковой полости. При выдвижении
штока в цилиндр необходимо подать больше воздуха, чем при его
втягивании.
Поэтому скорость втягивания выше, чем скорость выдвижения при
одинаковых нагрузках на шток.
Глава 3
Условные обозначения и стандарты в области пневмоавтоматики
Условные графические обозначения пневмоэлементов
Проектирование пневматических систем требует применения
единых норм изображения конструкций и схем. Условные
обозначения отражают следующие свойства пневмоэлементов:
тип управления и возврата в исходное положение,
число линий (присоединений) и их обозначения,
число позиций переключения,
принцип действия,
упрощенное представление проточной части.
Конструкторское решение не должно отражаться в условном обозначении.
Условные обозначения, которые находят применение в пневмоавтоматике,
выполняются в соответствии с ДИН ИСО 1219 "Гидравлические и
пневматические системы и приборы - обозначение схем" (DIN ISO 1219
"Fluidtechnische Systeme und Geraete - Schaltzeichen"). Ниже
представлены наиболее важные условные обозначения. Полный перечень
условных обозначений дан в учебнике ТР102.
Стандарты, необходимые для конструирования, испытания и оформления
пневматических систем управления, приведены в списке литературы
части С данной книги.
Энергоснабжение сжатым воздухом
Условные обозначения подсистемы снабжения сжатым воздухом могут
представлять как отдельные элементы, так и комбинации нескольких
элементов. Если применяется присоединение линии питания общее для
всех пневмоэлементов, то тогда возможно обозначение источника
сжатого воздуха в виде упрощенного символа.
Рис. 3.1. Условное обозначение элементов подсистемы энергоснабжения
Обозначение позиций распределителей
Рис. 3.2. Условное обозначение позиций переключения распределителей
Распределители
Распределители характеризуются числом присоединений, числом позиций
переключения и проточной частью. Для того, чтобы избежать ошибок при
монтаже, все входы и выходы распределителя необходимо маркировать.
Рис. 3.3. Линии (каналы) присоединения и позиции переключения
распределителей
Линии присоединения распределителей могут обозначаться буквами или
цифрами по DIN ISO 5599-3. Обе возможности представлены в табл.3.1.
Рабочие линии
DIN ISO 5599-3
Буквенная система
Линии (каналы) присоединения
1
Р
Линии (каналы) питания сжатым воздухом
2,4
А, В
Рабочие (выходные) линии (каналы)
3,5
R.S
Линии (каналы) выхлопа
10
Y
Подаваемый сигнал закрывает проход от линии 1 к линии 2
12
Y.Z
Подаваемый сигнал соединяет линию 1 с линией 2
14
Z
Подаваемый сигнал соединяет линию 1 с линией 4
81,91
Pz
Пневматическое сервоуправление
Таблица 3.1. Рабочие и управляющие пневмолинии
Замечание
В этом учебнике все линии присоединения обозначаются цифрами и
буквами.
Рис. 3.4. Примеры обозначений
Виды управления
В зависимости от системных требований к виду управления
пневматическими распределителями применяют:
мускульное управление,
механическое управление,
пневматическое управление,
электрическое управление,
комбинированное управление.
Условные обозначения способов управления должны соответствовать DIN
ISO 1219. Основные способы управления распределителем и возврата его
в исходное состояние должны изображаться вместе с распределителем.
Обычно условные обозначения способов управления изображаются с обеих
сторон позиций переключения. Дополнительные способы управления, как,
например, ручное управление, показываются отдельно.
Рис. 3.5. Способы управления распределителями
Обратные клапаны
Обратные клапаны служат в качестве базового элемента в целом ряде
устройств. Известны обратные клапаны как с возвратной пружиной, так
и без нее. Для того, чтобы поток воздуха мог проходить в прямом
направлении в обратном клапане с пружиной, сила от давления газа
должна быть больше, чем сила от пружины.
Рис. 3.6. Обратный клапан и клапаны, построенные на его основе
Дроссели
Как правило, дроссели являются регулируемыми с возможностью
дросселирования в обоих направлениях. Если дроссель изображен со
стрелкой, то это означает, что дроссель является регулируемым.
Стрелка не указывает на направление прохождения воздуха. В дросселе
с обратным клапаном последний включается параллельно дросселю. В
этом случае дросселирование осуществляется только в одном
направлении.
Рис. 3.7. Дроссели
Клапаны давления
Клапаны давления предназначены для поддержания давления в
пневматической системе или в отдельных ее частях. Клапаны давления
являются обычно регулируемыми за счет изменения усилия
предварительного сжатия пружины. В зависимости от назначения
различают следующие типы клапанов:
редукционный клапан без разгрузки,
редукционный клапан с разгрузкой,
предохранительные клапаны.
Рис. 3.8. Клапаны давления
Условное обозначение представляет собой клапан давления с проточной
частью, которая в исходном состоянии является или открытой, или
закрытой. У редукционных клапанов проточная часть всегда открыта. У
предохранительных клапанов проточная часть остается закрытой так
долго, пока сила давления не достигнет настроенного значения силы
предварительного натяжения пружины.
Линейные исполнительные устройства
Линейные исполнительные устройства или цилиндры изображаются в виде,
близком к их конструктивной форме.
Цилиндры одностороннего действия, двустороннего действия и
бес-штоковые служат основой других вариантов конструкций. Применение
демпфирования в конце хода способствует увеличению долговечности,
что достигается за счет снижения нагрузки в конечном положении путем
уменьшения скорости движения поршня. Если условное обозначение
цилиндра включает стрелку, то это означает, что демпфирование в
конце хода является регулируемым.
Рис. 3.9. Линейные исполнительные устройства
Вращательные приводы
Различают вращательные приводы в виде моторов с неограниченным углом
поворота и поворотные приводы с ограниченным углом поворота.
Пневмомоторы вращаются обычно с очень большим числом оборотов,
которое может быть постоянным или регулируемым. Поворотные цилиндры
имеют или нерегулируемый, или регулируемый угол поворота, а также
могут иметь демпфирование в зависимости от нагрузки или скорости
вращения.
Рис. 3.10. Исполнительные устройства вращательного действия
Вспомогательные условные обозначения
Имеется целый ряд важных дополнительных узлов, которые применяются
совместно с упомянутыми устройствами.
Рис. 3.11. Вспомогательные условные обозначения
Основные требования по технике безопасности
На сегодняшний день еще нет стандарта по технике безопасности при
работе с пневматическими системами. Поэтому для обеспечения
безопасности должны приниматься во внимание такие правила и
рекомендации, которые используются в ряде других областей техники.
Ниже приводятся выдержки из правил N 3229 Немецкой ассоциации
инженеров "Правила технического проектирования станков и другого
производственного оборудования", касающиеся вопросов техники
безопасности.
Р4.5. Техника безопасности
Р 4.5.1. Отказ системы управления
При отказе или выключении системы управления должна быть обеспечена
безопасность обслуживающего персонала.
Р 4.5.2. Выключатель "АВАРИЙНЫЙ ОСТАНОВ".
Пневматические установки с несколькими силовыми цилиндрами должны
оборудоваться выключателями "Аварийный останов". В зависимости от
назначения установки и ее рабочих характеристик выключатель
"Аварийный останов" может выполнять следующие функции:
отключение давления питания,
возврат всех исполнительных устройств в исходное положение или
блокировка всех исполнительных устройств в текущем положении.
Возможна также комбинация перечисленных функций.
Требования по технике безопасности пневматических зажимных
устройств
При производстве зажимных устройств должны соблюдаться следующие
правила:
Элементы управления пневматических зажимных устройств должны
быть спроектированы и расположены таким образом, чтобы они не
могли случайно сработать. Этого можно достичь за счет:
оборудования переключающих устройств с ручным управлением крышками
или кожухами (козырьками),
применения блокировки в системе управления.
Необходимо принять меры, исключающие попадание рук в рабочую часть
зажимного устройства. Это достигается путем:
размещения зажимного цилиндра вне области механизма подачи станка,
применения безопасных зажимных цилиндров, которые развивают полное
давление сжатия лишь на фиксируемой детали,
применения управления, обеспечивающего защиту рук оператора.
Установки с пневматическими зажимными устройствами должны
размещаться так, чтобы приводы шпинделя и подачи могли включаться
только в том случае, если процесс фиксации детали уже
завершен. Это достигается за счет применения:
датчиков давления или
клапанов последовательности.
Выход из строя источника питания сжатым воздухом не должен приводить
к раскрытию зажимного устройства во время обработки зажатой в нем
детали. Это достигается с помощью:
механических фиксаторов,
"самосхватывающих" зажимных устройств,
пневматических аккумуляторов в системе питания. Загрязнение
окружающей среды
Пневмосистема может быть источником двух видов загрязнения
окружающей среды:
шума, возникающего при выбросе воздуха в атмосферу.
масляного тумана, сбрасываемого в атмосферу из компрессора или
маслораспылителя вместе с отработанным воздухом.
Шум
Должны применяться меры для снижения высокого уровня шума,
возникающего при сбросе воздуха в окружающую среду. Это может
достигаться за счет использования глушителя шума.
Глушители шума служат
для снижения шума при сбросе воздуха из распределителя. Они снижают
скорость протекающего воздуха, что может привести к незначительному
уменьшению скорости движения штока цилиндра. Однако в случае
применения дросселя с глушителем шума можно, регулируя его
сопротивление, подбирать требуемую скорость поршня.
Уровень шума также можно снизить путем присоединения к выхлопным
отверстиям распределителей трубопроводов, по которым воздух
отводится к одному общему глушителю или в специальный резервуар.
Масляный туман
Сжатый воздух, сбрасываемый из пневмоустройств, содержит распыленное
смазочное масло, которое в виде масляного тумана длительное время
остается в окружающей среде и может вдыхаться обслуживающим
персоналом. Загрязнение окружающей среды особенно высоко, когда
установка содержит большое количество пневмомоторов и цилиндров
большого размера. В этом случае рекомендуется применение глушителей
шума с фильтрами, благодаря которым большая часть масляной пыли
отделяется и не попадает в окружающую среду.
Безопасность работы
При обслуживании пневматических систем следует быть осторожным при
установке и демонтаже пневматических линий. Пневматическая энергия,
накопленная в шлангах и трубах, при демонтаже внезапно
высвобождается, что вызывает свободное неконтролируемое движение
трубопровода и может привести к травме персонала.
Кроме того, если в воздухе содержатся частицы загрязнений, то они
представляют опасность для глаз.
Глава 4
Методы проектирования пневматических систем
Разработка пневматической системы управления
Процесс проектирования пневматической системы состоит из
нескольких этапов. Для получения хороших результатов важно
составить подробную документацию. При этом должны
приниматься во внимание все действующие нормы и обозначения.
Конструкторская документация на пневмосистему должна
включать:
диаграмму "перемещение - шаг" или диаграмму
"перемещение-время",
принципиальную схему,
описание работы системы,
технические данные на все элементы системы.
Дополнительно может прилагаться следующая документация:
спецификация или перечень элементов системы,
информация по обслуживанию системы и поиску неисправностей,
список запасных или изнашивающихся частей.
Применяются в основном два метода разработки принципиальных схем
системы:
"интуитивные" методы проектирования,
систематические методы проектирования по определенному алгоритму.
Если в первом случае от разработчика требуется большой опыт и
хорошая интуиция, а также значительные затраты времени, то при
использовании второго метода - выполнение определенной
последовательности операций при соответствующем уровне теоретических
знаний основ предмета. Целью любой разработки принципиальной схемы
является обеспечение выполнения работающей системой заданных
функций. При выборе решения предпочтение отдается высокой надежности
и простоте обслуживания даже за счет более значительных материальных
затрат. Этому способствует систематическая разработка принципиальных
схем. Однако в большинстве случаев спроектированные систематическими
методами системы, имеют большее число элементов, чем та же система,
спроектированная при использовании "интуитивного" метода.
Обычно дополнительные затраты на элементную базу быстро
компенсируются за счет сокращения времени проектирования, а позднее
- за счет сокращения расходов на обслуживание системы. В целом,
должна быть уверенность, что время, затраченное на проектирование и,
особенно, на упрощение схемы, находится в разумном соответствии с
общим временем, затраченным на создание системы.
Независимо от того, какой метод применяется и на какой элементной
базе реализуется система, ее разработчику необходимы фундаментальные
знания устройства, принципа действия и характеристик применяемых
элементов.
Блок-схема цепи управления
Блок-схема цепи управления дает общее представление о
структуре системы управления и последовательности
прохождения сигнала.
Рис. 4.1. Классификация элементов цепи управления
При разработке схемы системы ее функции условно подразделяют
на ввод (получение) сигнала, обработку сигнала, выдачу
сигнала и исполнение команды. Практикам такая классификация
хорошо известна. Чаще всего в больших установках управляющая
часть системы конструктивно отделяется от ее исполнительной
(силовой) части.
По схеме прохождения сигнала можно проследить путь сигнала
от его получения до исполнения. На рис. 4.2 приведена
структура системы управления.
Рис. 4.2. Структура системы управления
На принципиальной схеме системы, представленной на рис. 4.3,
в наглядной форме показана структура цепи управления.
Информационные (входные) устройства - распределители с ручным
управлением 1.2, 1.4
(распределители с кнопкой) и распределитель с механическим
управлением 1.3 (с роликовым рычагом).
Логико-вычислительное устройство (процессор) -перекидной клапан 1.6,
выполняющий функции логического элемента "ИЛИ".
Усилитель мощности - управляющий распределитель 1.1.
Исполнительное устройство - цилиндр 1.0.
Рис. 4.3. Принципиальная схема
Блок-схема и структура принципиальной схемы
Структура принципиальной схемы системы должна соответствовать ее
блок-схеме, при этом последовательность прохождения сигнала должна
изображаться снизу вверх.
На принципиальной схеме применяются упрощенные условные обозначения.
При больших принципиальных схемах подсистема энергоснабжения (блок
подготовки воздуха, запорный кран, различные присоединительные
устройства) для упрощения изображается на чертеже отдельно.
Рис. 4.4. Блок-схема и элементы пневматической цепи управления
Изображение трубопроводов на принципиальной схеме системы не
обязательно должно соответствовать действительной (монтажной) схеме
прокладки трубопроводов на установке.
4.4.Составление принципиальной схемы
Постановка задачи.
Шток цилиндра двустороннего действия должен выдвигаться при
кратковременном нажатии пневмокнопки или ножной педали.
После достижения крайнего положения шток цилиндра должен сразу
вернуться в исходное положение, если кнопка и педаль к этому моменту
будут уже отпущены.
Рис. 4.5. Принципиальная схема
Решение.
Распределитель 1.3, управляемый толкателем с роликом, установлен в
том месте, куда перемещается полностью выдвинутый шток цилиндра. На
принципиальной схеме этот элемент изображен на уровне ввода
сигналов, а не там, где он расположен физически. Физическое же его
расположение показано меткой, обозначенной также 1.3.
Если система управления сложная и содержит несколько исполнительных
элементов, то схему удобно разбить на несколько отдельных цепей
управления, которые могут быть сформированы для каждой
функциональной группы.
Если это возможно, то цепи должны располагаться одна за другой
соответственно последовательности выполнения операций.
Обозначения элементов схемы
Информационные устройства должны быть изображены на
принципиальной схеме в невключенном состоянии. Если
распределители в исходном положении находятся под
воздействием сигнала управления, то это показывается
изображением воздействия кулачка на толкатель
распределителя. В этом случае распределитель показывается во
включенном состоянии.
Рис. 4.6. Распределитель в исходном положении под действием
сигнала
Цифровое обозначение
При цифровом обозначении нумерация отдельных элементов
группы 0 охватывает элементы энергоснабжения, группы 1,2,...
отдельные управляющие цепи. Каждому управления цилиндру
присваивается обычно номер группы.
0.1, 0.2 и т.д.
Элементы системы питания
1.0, 2.0 и т.д.
Исполнительные устройства
1.1,2.1 ит.д.
Управляющие распределители
.01, .02 и т.д.
Элементы, расположенные между исполнительным
устройством и управляющим распределителем
.2, .4 и т.д.
Элементы, которые вызывают выдвижение штока
.3, .5 и т.д.
Элементы, которые вызывают втягивание штока
Таблица 4.1. Цифровое обозначение элементов схем
Буквенное обозначение
Буквенное обозначение применяется прежде всего при
систематическом проектировании принципиальных схем.
Обозначение конечных выключателей взаимосвязано с
обозначением цилиндров, с помощью которых они управляются.
А, В и т.д.
Исполнительные устройства
- а0, в0 и т.д.
Концевые выключатели, которые приводятся в
движение цилин- драми А, В,., при втянутом
положении штока
- а1, в1 ит.д.
Концевые выключатели, которые приводятся в
движение цилин- драми А, В,., при выдвинутом
положении штока
Таблица 4.2. Буквенное обозначение элементов схем
Основные правила изображения схем
Реальное пространственное расположение элементов не принимается во
внимание.
Цилиндры и распределители должны, по возможности, изображаться
горизонтально.
Поток энергии в цепи управления направлен снизу вверх.
Источник энергии может изображаться в упрощенном виде.
Отдельные элементы должны представляться в исходном или невключенном
положениях. Элементы, находящиеся под воздействием сигнала
управления, должны изображаться совместно с переключающим
толкателем.
Линии трубопроводов должны быть прямыми и, по возможности, без
пересечений. Места соединений трубопроводов под прямым углом
(тройники, крестовины) отмечают точкой.
"Жизненный" цикл пневматической системы
Разработка пневматической системы должна проводиться с помощью
алгоритмического процесса проектирования. "Жизненный" цикл -
процесс, охватывающий все этапы от постановки проблемы до ее
модернизации.
Рис. 4.7. "Жизненный" цикл пневматической системы
На рисунке показаны различные этапы разработки пневматической
системы, составляющие весь цикл ее существования.
Анализ
Первым шагом является определение функционального назначения
системы. При этом следует помнить, что проектирование или
модернизация решения не являются частью этапа анализа.
Последовательность общего плана проектирования может
корректироваться. Проектирование
Разработка проекта включает два этапа:
На первом этапе разрабатывается эскизный проект системы, в рамках
которого выбираются основные компоненты системы и источники
энергоснабжения. Здесь же могут быть рассмотрены и альтернативные
решения.
На втором этапе проектирования разрабатывается технический проект, в
рамках которого ведется:
разработка пневматической системы, включая определение параметров и
выбор аппаратуры,
разработка документации,
уточнение дополнительных требований к системе,
составление плана реализации проекта,
составление перечня элементов и спецификации,
проведение расчетов стоимости. Реализация проекта
Перед монтажом системы на объекте управления должно быть полностью
проверено функционирование системы. После окончательного монтажа
установки необходимо еще раз провести функциональное тестирование
системы. Для того чтобы быть уверенным в полной
работоспособности системы, необходимо проверить все ожидаемые режимы
работы, такие как ручное управление, автоматическое управление,
аварийное выключение, блокировка частей системы и т.д.
Оценка системы
После завершения процесса наладки и пуска системы сравниваются ее
фактические параметры с данными технического задания.
Обслуживание
Регулярное и тщательное обслуживание системы позволяет сократить
время простоев, повысить надежность и снизить эксплуатационные
расходы.
После отработки системой определенного числа циклов некоторые из
входящих в нее элементов могут проявить признаки преждевременного
износа, причиной которого являются:
их неправильный выбор;
изменение условий работы.
Безусловно, можно констатировать, что при регулярном обслуживании
системы уменьшается опасность выхода ее из строя.
Модернизация системы
Обобщенные данные по опыту производства, обслуживания и ремонта
позволяют дать рекомендации для повышения надежности системы при ее
возможной модернизации.
Глава 5
Схемы с одним исполнительным устройством
Прямое управление пневматическим цилиндром
Простейшим управлением цилиндрами одностороннего и
двустороннего действия является прямое управление. При этом
управление цилиндром осуществляется непосредственно (прямо)
с помощью распределителя, приводимого в движение мускульной
или механической силой без дополнительного усиления сигнала
управления.
Ориентировочные границы применения прямого управления
пневматическим цилиндром:
Цилиндр с диаметром поршня менее 40 мм.
Управляющий распределитель с условным проходом присоединительного
канала менее 1/4".
Пример 1.
Прямое управление цилиндром одностороннего действия
Постановка задачи.
Цилиндр одностороннего действия с диаметром поршня 25 мм при
нажатии на пневмокнопку должен зажимать деталь. Пока кнопка
удерживается в нажатом положении, шток цилиндра остается в
крайнем выдвинутом положении. При отпускании кнопки деталь
освобождается за счет отвода штока.
Рис. 5.1. Эскиз объекта управления
Решение.
Для управления цилиндром одностороннего действия необходимо
использовать 3/2-распределитель. В нашем случае объем
полости цилиндра невелик и расход потребляемого им воздуха
небольшой, поэтому распределитель может иметь ручное
управление от кнопки с пружинным возвратом.
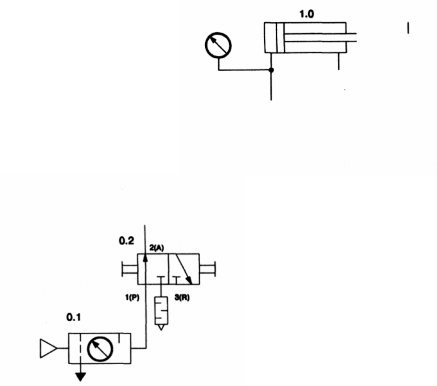
Рис. 5.2. Принципиальная схема системы
При нажатии на кнопку воздух проходит через управляющий
распределитель 1.1 от канала питания 1(Р) к выходному каналу
2(A) и, поступая в полость цилиндра 1.0, заставляет его
поршень двигаться, преодолевая усилие пружины. При
отпускании кнопки возвратная пружина распределителя приводит
его в исходное состояние, при котором полость цилиндра
сообщается посредством канала 3(R) с атмосферой. Возвратная
пружина цилиндра перемещает его шток в исходное положение.
Так как в данной схеме исполнительный элемент представлен
цилиндром, то он обозначается номером 1.0, а его управляющий
распределитель - номером 1.1.
Примечание.
На этой и последующей принципиальных схемах блок подготовки
воздуха обозначается как элемент 0.1, а запорный вентиль
системы питания сжатым воздухом - 0.2.
Упражнение 1. Прямое управление цилиндром, двустороннего
действия
Постановка задачи.
Шток цилиндра двустороннего действия выдвигается при нажатии
пневмокнопки. При отпускании кнопки шток втягивается.
Цилиндр имеет небольшой диаметр поршня (25 мм) и при
заданной скорости движения поршня расход воздуха является
небольшим.
Задание.
Составьте принципиальную схему системы.
Обозначьте элементы схемы и пронумеруйте все
присоединительные линии (каналы).
Рис. 5.3. Эскиз объекта управления
Вопрос.
Как поведет себя шток цилиндра, если на короткое время
нажать кнопку, а затем отпустить ее? Опишите принцип
действия системы, используя ее принципиальную схему.
Рис. 5.4. Принципиальная схема системы
Непрямое управление цилиндром
Для управления цилиндрами большого диаметра или с большим
потреблением сжатого воздуха применяются управляющие
распределители с большим номинальным расходом. Сила,
необходимая для переключения такого распределителя вручную,
может оказаться довольно большой. Поэтому в таких случаях
предпочтительно использовать непрямое (пилотное) управление.
При этом с помощью второго распределителя небольших размеров
формируется сигнал, который, управляя потоком воздуха,
создает силу, достаточную для переключения управляющего
распределителя (усилителя мощности). Непрямое управление
используется также в тех случаях, когда:
цилиндр должен двигаться с высокой скоростью,
оператор значительно удален от цилиндра,
предъявляются повышенные требования к быстродействию исполнительной
подсистемы.
Пример 2.
Непрямое управление цилиндром одностороннего действия
Постановка задачи.
Шток цилиндра одностороннего действия с большим диаметром
поршня при нажатии на кнопку должен зажать деталь.
После отпускания кнопки шток цилиндра должен втянуться.
Рис. 5.5. Эскиз объекта управления
Решение.
В исходном положении шток цилиндра 1.0 втянут,
распределитель 1.1 под действием возвратной пружины
находится в выключенном состоянии. Пилотный распределитель
1.2 с ручным управлением от кнопки под действием пружины
также выключен и его выходной канал 2(A) соединен с
атмосферой. Питание сжатым воздухом подается к каналам 1(Р)
обоих элементов 1.1 и 1.2.
Рис. 5.6. Принципиальная схема системы
3/2-распределитель с ручным управлением от кнопки 1.2 при
срабатывании открывает проход воздуху от канала питания 1
(Р) к выходному каналу 2(A), где появляется пневматический
сигнал, поступающий на вход 12(Z) управляющего
распределителя 1.1. Этим сигналом распределитель 1.1
переключается, преодолевая силу действия пружины, после чего
канал питания 1(Р) соединяется с выходным каналом 2(A),
открывая проход воздуху в полость цилиндра. Поршень цилиндра
начинает двигаться, шток выдвигается. Сигнал на управляющем
входе 12(Z) распределителя 1.1 будет существовать, и шток
цилиндра будет оставаться в выдвинутом положении до тех пор,
пока будет нажата кнопка 1.2. Это и есть непрямое управление
цилиндром от кнопки.
Если кнопку отпустить, возвратная пружина переместит
распределитель 1.2 в исходное положение, отсекая выходной
канал 2(A) от питания соединяя его с атмосферой через канал
3(R). Это приведет к исчезновению сигнала управления на
распределителе 1.1, который под действием пружины
возвращается в исходное положение, соединяя полость цилиндра
дра с атмосферой. При этом пружина цилиндра 1.0 перемещает
пор шень со штоком в исходное положение.
Упражнение 2. Непрямое управление цилиндром двустороннего
действия
Постановка задачи.
Шток цилиндра двустороннего действия должен выдвигаться при
нажатии на кнопку и втягиваться после ее отпускания. Цилиндр
имеет диаметр поршня 250 мм и потребляет большой расход
воздуха.
Задание.
Составьте и нарисуйте принципиальную схему системы.
Обозначьте элементы и все их присоединительные линии
(каналы).
Рис. 5.7. Эскиз объекта управления
Вопрос.
Как поведет себя шток цилиндра, если на короткое время
нажать кнопку, а затем отпустить ее? Опишите принцип
действия системы, используя ее принципиальную схему.
Рис. 5.8. Принципиальная схема системы
Логические функции "И" и"ИЛИ"
С помощью пневматического перекидного клапана и клапана двух
давлений можно реализовать логические функции. Оба элемента
имеют два входа и один выход. Выход перекидного клапана
("ИЛИ"-элемента) включается в том случае, если имеется, как
минимум, один входной сигнал на его входах (X ИЛИ Y). Выход
клапана двух давлений ("И"-элемента) включается в том
случае, если имеются входные сигналы на обоих входах (X И
Y). Логические элементы в пневматической системе выполняют
роль процессоров.
ПримерЗ. "И"-функция
Постановка задачи.
Шток цилиндра двустороннего действия должен выдвигаться при
срабатывании 3/2-распределителя 1.4, управляемого от рычага
с роликом (роликового рычага), и при нажатии на кнопку 3/2-
распределителя 1.2. Цилиндр должен вернуться в исходное
состояние, если отпущены рычаг с роликом или кнопка.
Рис. 5.9. Принципиальная схема системы
Решение.
Входы X и Y клапана двух давлений 1.6 соединены с выходными
каналами 2(A) распределителей 1.2 и 1.4. 3/2-распределитель
1.4 с управлением от рычага с роликом приводится в движение
с помощью наконечника детали, создавая при этом сигнал на
входе клапана двух давлений. Так как только на одном входе
имеется сигнал управления, то "И"-условие не является
выполненным и на выходе клапана двух давлений сигнал
отсутствует.
Если теперь нажать кнопку 3/2-распределителя 1.2, то на
второй вход поступит сигнал, выполнится логическое
"И"-условие и появится сигнал на выходе клапана двух
давлений. 5/2-распределитель с пневматическим управлением
переключится, сжатый воздух поступит в поршневую полость
цилиндра и шток выдвинется.
Если один из двух распределителей 1.2 или 1.4 выключается,
то в этом случае "И"-условие не выполняется и, на выходе
клапана двух давлений сигнал снимается. Канал управления
14(Z) управляющего распределителя 1.1 соединяется через
выключившиеся распределители 1.2 или 1.4 с атмосферой.
Управляющий распределитель 1.1 переключается в исходное
состояние. Давление питания поступает в штоковую полость,
обеспечивая втягивание штока.
В качестве альтернативы клапану двух давлений для реализации
"И"-операции может применяться последовательное соединение
двух 3/2-распределителей. Сигнал управления проходит через
распределитель 1.2 с кнопочным управлением и распределитель
1.4 с роликовым рычагом к управляющему распределителю 1.1.
Распределитель 1.1 переключается только тогда, когда
выполняется логическое условие "И", т.е. если сигнал
управления воздействует на оба распределителя 1.2 и 1.4, При
снятии сигнала управления с одного из двух распределителей
1.2 или
1.4 сигнал управления на распределителе 1.1 снимается и шток
втягивается.
Рис. 5.10. Принципиальная схема системы
Примечание
На данной принципиальной схеме в упрощенном виде
представлена система питания сжатым воздухом без изображения
блока подготовки воздуха и запорного вентиля.
Упражнение 3. "И"-функция
Постановка задачи.
Шток поршня цилиндра 1.1 должен выдвигаться только в том
случае, если деталь установлена на станке, защитная сетка
опущена и оператором нажата кнопка распределителя. После
отпускания кнопки распределителя или смещения защитной сетки
из ее нижнего положения поршень цилиндра
1.0 должен вернуться в свое исходное положение.
Задание.
Составьте и нарисуйте принципиальную схему.
Обозначьте распределители и пронумеруйте их
присоединительные линии (каналы).
Рис. 5.11. Эскиз объекта управления
Вопрос.
Как поведет себя шток цилиндра, если на короткое время
нажать кнопку, а затем отпустить ее? Опишите принцип
действия системы, используя ее принципиальную схему.
Рис. 5.12. Принципиальная схема системы
Пример 4. "ИЛИ"-функция
Постановка задачи.
Шток цилиндра двустороннего действия должен выдвигаться при
нажатии одной или одновременно двух кнопок. При отпускании
обеих кнопок шток цилиндра должен занять свое исходное
положение.
Рис. 5.13. Принципиальная схема системы
Решение.
Выходы обоих 3/2-распределителей 1.2 и 1.4 с управлением от
кнопок подсоединены ко входам X и Y перекидного клапана 1.6
(клапана"ИЛИ"). При нажатии одной из кнопок на вход X или Y
клапана "ИЛИ" поступает сигнал. Условие "ИЛИ" является
выполненным, и поэтому на выходе А клапана "ИЛИ" появляется
сигнал. Снятие сигнала давления через канал выхлопа
3/2-распределителя, не находящегося под действием сигнала
управления, предотвращает запирание трубопроводов
перекидного клапана 1.6. Далее сигнал поступает на вход
14(Z) управляющего распределителя 1.1, что вызывает его
переключение. Воздух под давлением поступает в поршневую
полость цилиндра
1.0, и шток цилиндра выдвигается.
При нажатии обеих кнопок на выходе А перекидного клапана
также появляется сигнал.
Если же отпустить обе кнопки, то сигналы на выходах X и Y
исчезнут и перекидной клапан соединит вход управления 14(Z)
с атмосферой через выхлопное отверстие одного из
3/2-распределителей. Возвратная пружина переключит
распределитель 1.1 в исходное положение, при котором сжатый
воздух по каналу 2(B) подается в штоковую полость цилиндра,
а из поршневой полости по каналу 4(A) сбрасывается в
атмосферу. Шток цилиндра втягивается.
Дополнительное задание.
Для управления цилиндром должен использоваться
распределитель с двусторонним пневматическим управлением,
обладающий свойством запоминания сигнала. Кроме того, для
получения сигнала о том, что шток цилиндра достиг крайнего
выдвинутого положения, следует использовать концевой
выключатель с управлением от роликового толкателя.
Рис. 5.14. Принципиальная схема системы
Одна из кнопок должна быть нажата только на короткий
промежуток времени для того, чтобы шток цилиндра выдвинулся,
так как действие сигнала на вход 14(Z) 5/2-распределителя с
двусторонним пневматическим управлением будет продолжаться
до тех пор, пока на вход 12(Y) не поступит сигнал. Как
только шток поршня достигнет переднего крайнего положения,
концевой выключатель 1.3 с управлением от роликового рычага
включится и подаст сигнал на вход 12(Y) распределителя 1.1,
который переключится. Шток втянется. Втянутое положение
штока также может опрашиваться. Для этого необходим второй
концевой выключатель.
Рис. 5.15. Принципиальная схема системы
Дополнительные клапан двух давлений 1.10 (клапан "И") и
концевой выключатель 1.6 обеспечивают возврат штока в
исходное положение перед началом нового выдвижения, для
которого необходимо нажатие одной из кнопок при нажатом
толкателе конечного выключателя 1.6, т.е. при нахождении
штока в исходном (полностью втянутом положении). Когда шток
цилиндра полностью выдвигается и срабатывает концевой
выключатель 1.3, происходит втягивание штока цилиндра
независимо оттого, нажата какая-либо из кнопок или нет, так
как концевой выключатель 1.6 остается выключенным.
Упражнение 4. "ИЛИ"-функция
Постановка задачи.
Для подачи деталей из магазина используется цилиндр
двустороннего действия. Шток поршня цилиндра выдвигается
полностью при нажатии на кнопку или на ножную педаль. При
достижении крайнего выдвинутого положения шток должен начать
втягиваться. Для опроса конечного положения должен
использоваться 3/2-распределитель с управлением от рычага с
роликом.
Задание.
Составьте и нарисуйте принципиальную пневматическую схему
системы. Обозначьте элементы и пронумеруйте все их
присоединительные линии (каналы).
Рис. 5.16.
Эскиз объекта управления
Вопрос.
Как поведет себя шток цилиндра, если на короткое время
нажать кнопку или педаль, а затем отпустить? Опишите принцип
действия системы, используя ее принципиальную схему.
Рис. 5.17. Принципиальная схема системы
Пример 5. Схема системы с бистабильным распределителем и
регулируемой скоростью цилиндра
Постановка задачи.
Шток цилиндра двустороннего действия должен выдвигаться при
срабатывании 3/2-распределителя с управлением от кнопки.
Шток цилиндра должен оставаться в крайнем выдвинутом
положении до тех пор, пока не будет нажата вторая кнопка и
отпущена первая. После этого шток возвращается в исходное
положение и остается в нем до тех пор, пока не поступит
новый стартовый сигнал. Скорости поршня в обоих направлениях
должны регулироваться независимо друг от друга.
Рис. 5.18. Принципиальная схема системы, оснащенной
4/2-распределителем с двусторонним управлением
Решение.
4/2- или 5/2-распределитель с двусторонним управлением имеет
свойство памяти и называется бистабильным. Бистабильный
распределитель остается в положении, соответствующем
последнему поступившему сигналу до тех пор, пока не поступит
сигнал, который изменит его положение на противоположное.
Поэтому сигналы управления, поступающие на распределители с
памятью, могут быть кратковременными.
Для регулирования скорости движения поршня цилиндра в обоих
направлениях используются дроссели с обратным клапаном. Так
как в данном случае дросселируется вытесняемый из полости
цилиндра воздух, то здесь речь идет о процессе
дросселирования в магистрали
сброса.
Рис. 5.19. Принципиальная схема системы, оснащенной
5/2-распределителем с двусторонним управлением
В исходном положении управляющий распределитель переключен
таким образом, что на штоковую сторону поршня цилиндра
действует давление воздуха и поршень находится во втянутом
положении. При нажатии на кнопку распределителя 1.2 на его
выходе 2(A) появляется сигнал, который поступает на вход
14(Z) 5/2-распределителя 1.1.5/2-распределитель с
двусторонним управлением (с памятью) переключается так, что
поршневая полость цилиндра посредством канала 4(A)
соединяется с линией питания и шток поршня выдвигается. Если
подача воздуха в полость цилиндра осуществляется через
дроссель с обратным клапаном 1.01 без сопротивления, то
воздух, вытесняемый из штоковой полости через дроссель с
обратным клапаном 1.02, дросселируется, При этом скорость
выдвижения штока поршня может регулироваться. Если кнопку
распределителя 1.2 отпустить, то положение распределителя
1.1 останется неизменным, так как он обладает свойством
памяти, Если нажать на кнопку распределителя 1.3, то в
канале управления 12(Y) распределителя 1.1 появляется
сигнал.
Распределитель переключается, воздух поступает в штоковую
полость цилиндра и шток поршня втягивается. Дросселирование
сброса воздуха осуществляется дросселем с обратным клапаном
1.01. При отпускании кнопки распределителя 1.3 положение
распределителя 1.1 остается неизменным благодаря его
свойству памяти.
Обратные клапана "дросселей с обратными клапанами" 1.01 и
1.02 обеспечивают снижение потерь давления в магистралях
подачи сжатого воздуха в полости цилиндра. Дроссель
оказывает влияние на объемный расход воздуха, вытесняемого
из полостей цилиндра, и позволяет уменьшать скорость
движения штока. Различные по объему расходы воздуха,
вытесненного из поршневой и штоковой полостей цилиндра,
должны регулироваться независимо друг от друга для того,
чтобы таким образом настраивать скорости выдвижения и
втягивания штока.
Упражнение 5. Схема системы с бистабильным распределителем и
регулируемой скоростью цилиндра
Постановка задачи.
Цилиндр двустороннего действия должен выталкивать детали из
магазина на лоток. Шток цилиндра должен полностью
выдвигаться при нажатии на кнопку и втягиваться после
достижения крайнего положения. Сигнал о приходе штока в
крайнее выдвинутое положение должен поступать от концевого
выключателя с управлением от роликового рычага. Даже если
кнопка будет отпущена, шток цилиндра должен продолжать
движение вперед до тех пор, пока он не выдвинется полностью.
Скорости поршня цилиндра должны регулироваться в обоих
направлениях независимо друг от друга.
Задание.
Составьте и нарисуйте принципиальную схему системы.
Обозначьте элементы и пронумеруйте все их присоединительные
линии (каналы).
Рис. 5.20. Эскиз объекта управления
Вопросы.
Как поведет себя шток цилиндра, если кнопка останется
нажатой в тот момент, когда шток поршня достигнет своего
конечного положения?
Как поведет себя шток цилиндра во время выдвижения, если
концевой выключатель, управляемый от рычага с роликом,
будет находиться в среднем положении хода штока?
Опишите исходное состояние системы.
Опишите принцип действия системы, используя ее
принципиальную схему.
Рис. 5.21. Принципиальная схема системы
Упражнение 6. Клапан быстрого выхлопа
Постановка задачи.
При совместном срабатывании распределителя с управлением от
кнопки и концевого выключателя, управляемого рычагом с
роликом, гибочный инструмент наезжает на кромку заготовки и
кантует материал. Инструмент приводится в движение штоком
цилиндра двустороннего действия. Для повышения скорости
выдвижения штока в схеме должен быть использован клапан
быстрого выхлопа. Скорость втягивания штока поршня должна
быть регулируемой. Если какая-либо из кнопок будет отпущена,
шток цилиндра медленно возвращается в исходное положение.
Задание.
Составьте и нарисуйте принципиальную схему системы.
Обозначьте элементы и пронумеруйте все их присоединительные
линии (каналы).
Рис. 5.22. Эскиз объекта управления
Вопрос.
Как поведет себя шток цилиндра, если после начала движения
штока отпустить кнопку?
Опишите принцип действия системы, используя ее
принципиальную схему.
Рис. 5.23. Принципиальная схема системы
Пример б. Управление по давлению
Постановка задачи.
На пластмассовые детали с помощью штампа, приводимого в
движение пневмоцилиндром двустороннего действия, наносится
тиснение. Штамп должен опускаться на деталь при нажатии на
кнопку. Возврат штампа в исходное положение осуществляется
автоматически после достижения в цилиндре заданного значения
давления. Это давление определяет усилие тиснения, оно
должно быть настраиваемым.
Рис. 5.24. Эскиз объекта управления.
Решение.
Если при пуске системы шток не занял исходного положения, то
необходимо провести коррекцию его положения. Это
осуществляется с помощью кнопок ручного управления
5/2-распределителем с двусторонним пневматическим
управлением и вспомогательным ручным управлением.
В исходном положении на все распределители не действует
сигнал управления, штоковая полость цилиндра должна
находиться под давлением воздуха, и шток поршня должен
оставаться во втянутом положении.
При нажатии на кнопку распределителя 1.2 на входе 14(Z)
5/2-распределителя 1.1 появляется сигнал. 5/2-распределитель
переключается, на его выход 4(A) подается сжатый воздух,
который поступает в поршневую полость цилиндра и шток
цилиндра начинает выдвигаться. В этом положении
распределитель 1.1 остается даже в том случае, если отпущена
кнопка распределителя 1.2. После того, как шток поршня со
штампом достигнет пластмассовой детали, его движение
прекращается и давление в поршневой полости цилиндра
поднимается. Возрастающее давление вызывает увеличение
усилия штампования.
Управляющий вход 12(Z) клапана последовательности 1.3
соединен трубопроводом с поршневой полостью цилиндра 1.0.
Когда давление в полости цилиндра достигает значения
давления настройки клапана последовательности, то
3/2-распределитель клапана последовательности переключается.
Его выходной сигнал воздействует на управляющий вход 12(Y)
распределителя 1.1. Распределитель
переключается, воздух под давлением поступает в
штоковую полость цилиндра, шток поршня втягивается.
При втягивании поршня давление в поршневой полости
цилиндра снижается и клапан последовательности
возвращается в свое исходное положение.
Рис. 5.25. Принципиальная схема системы
Для того, чтобы гарантировать надежное переключение,
настраиваемое давление срабатывания клапана
последовательности должно быть меньше, чем давление
питания пневмосистемы.
Если выдвигающийся шток поршня встретит на своем
пути сопротивление, то еще до достижения позиции
прессования шток поршня начнет втягиваться.
Упражнение 7. Управление подавлению: тиснение пластмассовых
деталей
Постановка задачи.
Тиснение на пластмассовые детали наносится штампом,
приводимым в движение цилиндром двустороннего действия.
Штамп опускается на деталь при нажатии кнопки, а
возвращается в исходное положение автоматически, когда шток
достигает крайнего положения и давление в поршневой полости
повышается до установленного значения. Достижение крайнего
выдвинутого положения штока контролируется концевым
выключателем с управлением от рычага с роликом. Усилие
тиснения должно быть настраиваемым. Давление в поршневой
полости цилиндра должно измеряться с помощью манометра.
Задание.
Составьте и нарисуйте принципиальную схему системы.
Обозначьте элементы и пронумеруйте все их присоединительные
линии (каналы).
Рис. 5.26. Эскиз объекта управления
Вопрос. Как поведет себя шток цилиндра, если на короткое
время нажать кнопку, а затем отпустить ее? Опишите принцип
действия системы, используя ее принципиальную схему.
Рис. 5.27. Принципиальная схема системы
Пример 7. Клапан выдержки времени
Постановка задачи.
Для прижатия склеиваемых деталей друг к другу используется
цилиндр двустороннего действия. После нажатия кнопки шток
цилиндра должен медленно выдвигаться. В крайнем выдвинутом
положении шток цилиндра должен оставаться в течение 6
секунд, а затем должен автоматически вернуться в исходное
положение. Скорость выдвижения штока должна быть
регулируемой. Новое срабатывание цилиндра возможно только
при условии возвращения штока в исходное положение.
Рис. 5.28. Эскиз объекта управления
Решение.
Если при пуске системы шток оказался не в исходном
положении, то необходимо провести коррекцию. Это
осуществляется с помощью ручного управления
5/2-распределителем с двусторонним пневматическим
управлением и вспомогательным ручным управлением.
В исходном положении на все распределители, за исключением
концевого выключателя (распределителя 1.4, управляемого
рычагом с роликом), не действует сигнал управления, штоковая
полость цилиндра находится под давлением воздуха и шток
остается во втянутом положении.
Необходимые начальные условия для выдвижения штока цилиндра:
шток полностью втянут (включен концевой выключатель 1.4) и
включена кнопка "СТАРТ" (распределитель 1.2). Если условия
старта выполнены, то выходной сигнал клапана двух давлений
1.6 (клапан "И") поступает на вход 14(Z)
распределителя с двусторонним управлением 1.1, который
переключается. Воздух поступает в поршневую полость
цилиндра, и шток выдвигается.
Скорость выдвижения штока при этом настраивается с помощью
дросселя с обратным клапаном 1.02, установленного на выходе
из штоковой полости. После начала движения штока концевой
выключатель 1.4, освобождаясь, выключается.
Рис. 5.29. Принципиальная схема системы
Поэтому даже при нажатой кнопке распределителя 1.2 условие
"И" не выполняется и сигнал на входе 14(Z) распределителя
1.1 снимается, однако при этом положение распределителя 1.1
(обладающего свойством памяти) не изменяется. Новое нажатие
на кнопку распределителя
не приведет к старту до тех пор, пока система не
займет исходное положение. При достижении позиции
прессования включается концевой выключатель 1.3.
Через входящий в состав реле времени
1.5 дроссель с обратным клапаном начинается заполнение
объема воздухом, Скорость увеличения давления в емкости
зависит от настройки дросселя реле времени. Если давление
достигло необходимого уровня, то включается
3/2-распределитель и на управляющем входе 12(Y) распре-
делителя 1.1 появляется сигнал. Распределитель 1.1
переключается, шток втягивается. Скорость втягивания зависит
от настройки дросселя с обратным клапаном 1.01.
В начале процесса втягивания переключается концевой
выключатель
1.3 и емкость реле времени 1.5 соединяется с атмосферой
через дроссель с обратным клапаном и концевой выключатель
1.3. Как следствие, 3/2-распределитель реле времени
переключается в исходное состояние. Это приводит к снятию
сигнала с управляющего канала 12(Y) распределителя с
двусторонним управлением 1.1.
Когда шток поршня займет исходное положение, то включится
концевой выключатель 1.4 и после нажатия кнопки клапана 1.2
может начаться новый цикл работы.
Упражнение 8. Клапан выдержки времени
Постановка задачи.
Для прижатия склеиваемых деталей друг к другу используется цилиндр
двустороннего действия. При нажатии на кнопку шток поршня прессового
цилиндра выдвигается. Когда пресс прижмет деталь, он должен
оставаться в этом положении в течение 6 секунд, после чего шток
должен автоматически вернуться в исходное положение. Начало нового
цикла возможно только при условии достижения штоком крайнего
втянутого положения и при сохранении этого положения в течение 5
секунд. За это время склеенные детали вручную вынимаются из пресса,
на их место устанавливаются новые.
Выдвижение штока цилиндра должно происходить медленно, а втягивание
относительно быстро, но с возможностью регулирования скорости.
Задание.
Составьте и нарисуйте принципиальную схему системы. Обозначьте
элементы схемы и пронумеруйте все их присоединительные линии
(каналы).
Рис. 5.30. Эскиз объекта управления
Вопросы.
Как поведет себя шток цилиндра, если на короткое время нажать
кнопку, а затем отпустить ее? Опишите принцип действия системы,
используя ее принципиальную схему.
Рис. 5.31. Принципиальная схема системы
Глава 6
Схемы с несколькими исполнительными устройствами
Управление несколькими исполнительными устройствами
Для реализации схем с несколькими исполнительными
устройствами необходимо четкое понимание существа задачи.
Процесс движения отдельных исполнительных элементов должен
изображаться на диаграмме "перемещение-шаг" совместно с
условиями старта и переключения.
После уточнения циклограммы движения и условий переключения
проектируется принципиальная схема. Процесс проектирования и
разработки принципиальной схемы должен осуществляться в
соответствии с последовательностью, описанной в разделе А4.
Для реализации на практике необходимы схемы, в которых
исключается пересечение (совпадение) сигналов. Здесь под
пересечением сигналов понимается их одновременное
поступление на оба управляющих входа распределителей с
двусторонним управлением. Для устранения пересечения
сигналов можно использовать:
распределители с управлением от ломающегося рычага,
распределители с управлением от ломающегося рычага с роликом,
реле времени,
триггеры (переключающие распределители) или
тактовые цепочки.
Для лучшего понимания сущности этих методов ниже приводятся примеры
систем, в которых используются распределители с управлением от
ломающегося рычага с роликом и переключающие распределители
(триггеры).
Пример 8. Координированное (согласованное) перемещение
Постановка задачи.
Для перемещения деталей из магазина на лоток используются
два цилиндра двустороннего действия. При нажатии кнопки шток
первого цилиндра выдвигается, выталкивая деталь из магазина
и перемещая ее в зону действия второго цилиндра,
расположенного напротив лотка. Как только шток первого
цилиндра полностью выдвинется, выдвигается шток второго
цилиндра, сталкивая деталь на лоток, по которому она
перемещается в коробку. После этого шток первого, а за ним и
второго цилиндров втягиваются.
Для надежной транспортировки деталей должно обеспечиваться
координированное (согласованное) движение штоков цилиндров.
Для этого проводится опрос достижения штоками цилиндров
исходного и всех конечных положений.
Рис. 6.1. Эскиз объекта управления
Рис. 6.2. Диаграмма "Перемещение - шаг"
Рис. 6.3. Принципиальная схема системы: исходное положение
Решение.
Опрос проводится с помощью концевых выключателей, в качестве
которых применяются распределители, управляемые от рычагами
с роликами.
В исходной позиции штоки обоих цилиндров находятся во
втянутом положении и, следовательно, концевые выключатели
1.4 и 2.3 включены.
В качестве условий для старта системы необходимо, чтобы шток
цилиндра 1.0 был втянут и поступил сигнал от стартовой
кнопки 1.2.
Последовательность движения цилиндров иллюстрируется
диаграммой "Перемещение - шаг" и может быть разбита на
следующие шаги:
Шаг 1
1.2 и 1.4 включены
=>
Цилиндр 1.0 выдвигается
Шаг 2
2.2 включен
=>
Цилиндр 2.0 выдвигается
Шаг З
1.3 включен
=>
Цилиндр 1.0 втягивается
Шаг 4
2.3 включен
=>
Цилиндр 2.0 втягивается
Шаг 5
1.4 включен
=>
Исходное положение
После нажатия кнопки 1.2 распределитель с двусторонним
управлением 1.1 переключается, шток поршня цилиндра 1.0
выдвигается. Деталь выталкивается из магазина.
При достижении переднего конечного положения штоком
цилиндра 1.0 включается концевой выключатель 2.2.
Поэтому распределитель с двусторонним управлением 2.1
переключается, и шток цилиндра 2.0 выдвигается. Деталь
сталкивается в коробку.
При достижении переднего конечного положения штоком
цилиндра 2.0 включается концевой выключатель 1.3. Это
вызывает переключение управляющего распределителя 1.1 и
втягивание штока цилиндра 1.0.
Если шток цилиндра 1.0 полностью втянется, то включится
концевой выключатель 2.3 и переключится управляющий
распределитель 2.1. Шток поршня цилиндра 2.0 втянется и
при достижении своего конечного положения включит
концевой выключатель 1.4.
Только теперь система вновь займет свое исходное
положение, При нажатии на кнопку 1.2 может начаться
новый цикл работы системы.
Рис. 6.4. Иллюстрация шагов 1-5
Пример 9. Совпадение сигналов
Постановка задачи.
Если на распределитель с двусторонним управлением поступает
одновременно оба сигнала управления, говорят о совпадении
(пересечении) сигналов управления. Для решения этой проблемы
имеется несколько возможностей.
Прежде всего с помощью диаграммы "Перемещение-шаг" должны
быть выявлены точки (или положения системы), в которых имеет
место совпадение сигналов.
Рис. 6.5. Диаграмма "Перемещение - шаг"
с изображением положения информационных элементов
Вопрос. Где появляется совпадение (пересечение) сигналов?
Рис. 6.6. Принципиальная схема системы с пересечением
(совпадением) сигналов управления
Решение.
Из схемы (рис.6.6) видно, что совпадение сигналов
встречается на шагах 1 и 3 для управляющих распределителей
1.1 и 2.1 соответственно.
На управляющий вход 12(Y) распределителя с двусторонним
управлением 1.1 поступает сигнал от включенного концевого
выключателя 1.3. Если нажата кнопка 1.2, то появляется также
сигнал на управляющем входе 14(Z) распределителя 1.1. Это
совпадение устраняется благодаря применению распределителя,
управляемого от толкателя с ломающимся рычагом. Этот
распределитель включается от штока цилиндра только при
движении штока в одном направлении и располагается таким
образом, чтобы сигнал управления вначале кратковременно
появлялся и снимался в конечном положении.
На шаге 3 возникает совпадение сигналов на распределителе с
двусторонним управлением 2.1. Выдвинувшийся шток поршня
цилиндра 1.0 включает концевой выключатель 2.2. Шток поршня
цилиндра 2.0 выдвигается и включает концевой выключатель
2.3, который подает сигнал на последующее втягивание штока
поршня. Если концевой выключатель 2.2 в этот момент времени
еще включен, то к распределителю 2.1 одновременно приложены
два сигнала и он не может переключиться. Здесь также можно
исключить совпадение сигналов, если концевой выключатель 2.2
выполнен в виде распределителя, управляемого от толкателя с
ломающимся рычагом. На принципиальной схеме (рис.6.7)
концевые выключатели 1.3 и 2.2 обозначаются штрихами со
стрелками. Направление стрелок показывает, при каком
направлении движения концевой выключатель с ломающимся
рычагом создает сигнал управления. При движении штока поршня
в противоположном направлении взаимодействие с концевым
выключателем не вызывает появления сигнала на его выходе.
Рис. 6.7. Принципиальная схема системы
Устранение совпадения сигналов с помощью концевых
выключателей имеет следующие недостатки:
Конечные положения штоков опрашиваются с невысокой точностью.
Загрязнение концевых выключателей может привести к совпадению
сигналов.
Снижается быстродействие системы управления.
Отключение сигнала с помощью переключающего распределителя
Отключение сигнала с помощью переключающего распределителя
является еще одним методом устранения совпадения сигналов.
Сущность метода заключается в том, что сигнал существует
только в тот промежуток времени, когда он необходим для
переключения распределителя с двусторонним управлением. Это
достигается путем блокировки питания информационных
(входных) элементов (кнопок, конечных выключателей и т.п.)
триггером, который подает питание этих элементов только
тогда, когда их выходные сигналы необходимы. В качестве
триггера, т.е. переключающего распределителя, применяются
распределители с двусторонним пневматическим управлением.
Пример 10. Переключающий распределитель
Постановка задачи.
Вместо концевых выключателей с управлением от ломающегося
рычага для исключения совпадения сигналов можно применять
переключающие распределители. Важно, чтобы управляющие
сигналы своевременно подавались на 5/2-распределители 1.1 и
2.1 и при этом не допускалось совпадение сигналов.
Для этого линии давления питания концевых выключателей 1.3 и
2.2 должны своевременно коммутироваться с атмосферой
противоположным сигналом.
Решение.
В представленной на рис. 6.8. принципиальной схеме
переключающий распределитель 0.3 последовательно подает
сжатый воздух в магистрали (шины) S1 и S2 или соединяет их с
атмосферой. В исходном положении оба штока цилиндров
втянуты, концевые выключатели 1.3 и 1.4 включены и каналы
управления 12(Y) 5/2-распределителей с двусторонним
управлением 1.1 и 1.2 находятся под давлением.
После нажатия кнопки 1.2 распределитель 0.3 переключается
(сигнал поступает на его вход 14(Z)), соединяя шину S2 с
атмосферой и подавая сжатый воздух в шину S1. Концевой
выключатель 1.3 остается еще включенным, но в канале
управления 12(Y) распределителя 1.1 давление снимается.
Канал управления 14(Z) распределителя 1.1 запитывается
давлением и он переключается. Шток поршня цилиндра 1.0
выдвигается. Благодаря этому выключается концевой
выключатель 1.4 и канал управления 14(Z) переключающего
распределителя
0.3 соединяется со сливом.
При достижении штоком цилиндра 1.0 переднего конечного
положения включается концевой выключатель 2.2 и
распределитель 2.1 переключается. Шток поршня цилиндра 2.0
выдвигается.
При смещении штока цилиндра 2.0 из исходной позиции
выключается концевой выключатель 1.3, а при достижении
штоком переднего конечного положения включается концевой
выключатель 2.3.
Распределитель 0.3 переключается, линия S2 соединяется с
линией питания, а линия S1 с атмосферой. Распределитель 2.1
переключается, шток поршня цилиндра 2.0 втягивается.
При достижении им исходной позиции срабатывает концевой
выключатель 1.3, распределитель 1.1 переключается и шток
поршня цилиндра 1.0 втягивается. Когда шток поршня цилиндра
достигнет своего исходного положения, включится концевой
выключатель 1.4 и система вновь займет исходное положение.
При нажатии на кнопку 1.2 начнется новый цикл работы.
Рис. 6.8. Принципиальная схема системы
Пример 11. Переключающий распределитель
Постановка задачи.
С помощью сдвигающего устройства детали должны выниматься из
магазина и далее передаваться в коробку. Цилиндр 1.0 выталкивает
деталь из магазина, а цилиндр 2.0 передает ее в коробку. Шток
цилиндра 1.0 втягивается лишь тогда, когда шток цилиндра 2.0 втянут.
Рабочий цикл должен начинаться при нажатии стартовой кнопки.
Положения штока поршня должны опрашиваться с помощью концевых
выключателей.
Рис. 6.9. Эскиз объекта управления
Рис. 6.10. Диаграмма "Перемещение - шаг"
Рис. 6.11. Принципиальная схема системы
Решение.
На принципиальной схеме (рис.6.11.) все информационные устройства
включены активно, т.е. их каналы питания напрямую подключены к
источнику сжатого воздуха, а не через ряд управляющих
распределителей. Потери давления уменьшаются, а быстродействие
логико-вычислительной подсистемы увеличивается. Информационные
элементы соединяются с переключающим распределителем с помощью
клапанов двух давлений ("И"-клапанов).
Рассмотрим процесс управления, состоящий из трех шагов. Совпадение
сигналов может встретиться на втором шаге. На первом шаге
выдвигается шток цилиндра 1.0, а на втором шаге он должен втянуться,
Поэтому может быть совпадение сигналов на каналах управления 14(Z) и
12(Y) распределителя с двусторонним управлением 1.1. В исходном
положении концевой выключатель 1.4 включается штоком цилиндра 2.0,
Кнопка 1.2 включается на короткое время для пуска системы управления
и поэтому может использоваться для исключения первого совпадения
сигналов.
Второе совпадение сигналов встречается на распределителе с
двусторонним управлением 2.1, а именно - на третьем шаге. В данном
случае шток порня должен втягиваться, когда он достигнет переднего
конечного положения. Первый из двух сигналов в каналы управления
распределителя 2.1 должен поступать лишь кратковременно.
С целью исключения совпадения сигналов составлена принципиальная
схема с тремя линиями S1
...S3 для реализации трех шагов.
На первом шаге выдвигается шток поршня цилиндра 1.0. Сигнал к каналу
управления 14(Z) распределителя 1.1 передается от линии S1.
На втором шаге осуществляется два движения: шток поршня цилиндра 1.0
втягивается и шток поршня цилиндра 2.0 выдвигается. Теперь каналы
управления 12(Y) распределителя 1.1 и 14(Z) распределителя 2.1
запитываются от линии S2.
На третьем шаге с помощью сигнала, поступившего на вход 12(Y)
распределителя 2.1, втягивается шток поршня цилиндра 2.0. Этот
сигнал передается от линии S3.
Новый старт цикла возможен, если включены клапана 1.2 и 1.4. Затем
включается концевой выключатель 1.3 и подает сигнал в канал
управления 12(Y) переключающего клапана 0.3. Клапан 0.3
переключается и подает питание в линию S2, а линия S1 соединяется с
атмосферой, Шток цилиндра
1.0 втягивается, а цилиндра 2.0 выдвигается. Текущие конечные
положения опрашиваются концевыми выключателями 2.3 и 2.5, которые
подсоединены к каналу управления 12(Y) переключающего распределителя
0.4. Клапан 0.4 переключается, линия S2 соединяется с атмосферой, а
линия S3 - с питанием. Как только при выдвижении штока цилиндра 2.0
включится концевой выключатель 1.4, будут созданы условия для нового
старта системы управления. При нажатии пусковой кнопки 1.2 начнется
новый цикл работы.
Глава 7
Поиск неисправностей в пневматических системах управления
Документация
Техническая документация на пневматическую систему включает
в себя:
диаграмму "перемещение-шаг", • принципиальную схему системы, •
инструкции по эксплуатации,
список входящих в систему элементов и их технические характеристики.
В случае модификации системы в техническую документацию должны быть
внесены все изменения, чтобы потенциальные пользователи и инженеры
по техническому обслуживанию знали текущее состояние
системы.
Причины неисправностей и их устранение
Неисправности пневмосистемы могут быть вызваны, главным
образом, засорением элементов системы и трубопроводов,
которое возникает в результате:
взаимодействия с окружающей средой (например, при работе
с загрязненным воздухом, а также при высокой или низкой
температуре окружающей среды),
использования сжатого воздуха низкого качества (например, слишком
высокой влажности или с избыточным содержанием масла, поступающего
из маслораспылителя),
нарушения относительного движения исполнительных механизмов или их
элементов,
чрезмерной нагрузки,
неправильного обслуживания,
неправильного монтажа и подсоединения трубопроводов.
Эти причины могут привести к:
разрушению трубопроводов,
заклиниванию подвижных частей,
авариям,
утечкам сжатого воздуха,
падению давления в системе,
нарушению последовательности движения исполнительных устройств
пневмосистемы.
Диагностирование
Регулярные мероприятия по поиску и устранению неисправностей
сокращают время на обслуживание и простои пневматических систем
управления.
Неисправности внутри установки могут быть вызваны:
поломкой элементов управляемой установки,
поломкой элементов внутри пневматической системы управления.
Опыт показывает, что поломки внутри системы управления обычно
встречаются из-за неисправностей управляемой установки.
Поиск неисправностей
О возникновении неисправности системы можно судить по характеру
неправильного функционирования или остановки объекта управления,
Устранение неисправностей может осуществляться:
персоналом, эксплуатирующим установку,
персоналом по обслуживанию и ремонту.
Неисправности управляемой установки и многие неисправности системы
управления часто устраняются опытным оператором установки. В первую
очередь оператор и (или) наладчик анализируют состояние системы на
основании визуального контроля.
Обслуживающий персонал ищет неисправности и устраняет их на
основании собственного опыта эксплуатации данной установки.
Диагностирование неисправностей должно проводиться сразу же после их
первого появления. При этом необходимо руководствоваться
соответствующей методикой по их устранению, что позволит сократить
время простоев эксплуатируемой установки.
Устранение условий появления неисправностей
Даже самый добросовестный уход за пневмосистемой окажется
малоэффективным, если допущены ошибки при ее проектировании или
монтаже. Регулярные профилактические осмотры несколько увеличат
затраты на обслуживание, однако позволят существенно снизить число
случаев выхода системы из строя.
Нормальному функционированию системы способствуют:
Выбор качественных элементов системы, которые должны быть
настраиваемыми на требуемые условия работы и окружающей среды
(например, частота переключения, нагрузка и т.д.).
Защита пневмосистемы от загрязнения.
Демпфирование механических ударов, возникающих при работе
исполнительных устройств, путем установки амортизаторов.
Сокращение длины трубопроводов или установка в необходимых местах
дополнительных узлов их крепления.
Выявление неисправностей в пневматических системах
Как правило, после первичной настройки пневматические системы
работают устойчиво некоторое время. Признаки преждевременного износа
элементов пневмосистемы проявляются в течение нескольких недель или
даже месяцев.
Если появляются неисправности, то важно уметь искать их методически
правильно. При поиске неисправностей в большой системе ее можно
подразделить на маленькие составные части, в каждой из которых затем
по отдельности искать неисправности.
Если оператор установки не может сам устранить неисправность, то
следует вызвать персонал службы обслуживания и наладки.
Бывает, что некоторые части пневматической системы дополняются
новыми элементами, а мощность системы питания остается на прежнем
уровне. В зависимости от последовательности срабатывания
исполнительных механизмов и общего проекта установки в работе
системы могут появляться случайные сбои. Причиной этого может быть
недостаточное снабжение воздухом, которое проявляется в:
уменьшении скорости движения исполнительных устройств,
уменьшении силы или момента, развиваемого исполнительными
устройствами,
снижении быстродействия элементов системы.
Такие же последствия вызывает изменение проходного сечения некоторых
элементов в случае засорения или появление утечек в местах
соединений.
Неисправности, вызванные появлением конденсата в воздухе
Очень важно обеспечить подачу в систему сжатого воздуха без
конденсата. Конденсат может привести к коррозионным разрушениям
элементов системы. Кроме того, следует иметь в виду, что смазочное
масло без специальных присадок имеет склонность к образованию
эмульсии и смолистых отложений или клейких веществ. Все подвижные
соединения с небольшими зазорами особенно восприимчивы к такого рода
образованиям. Дополнительно возникает опасность превращения
продуктов смазки в смолу, которая будет разрушать систему и
загрязнять окружающую среду.
Неисправности, вызванные загрязнениями
Обычно пневматическая система управления снабжается воздухом через
блок подготовки воздуха, одной из задач которого является очистка
воздуха от твердых частиц. Обычно фильтры устанавливаются на входе
пневматических систем. Однако, если трубопроводы подвода питания к
пневмоаппаратам не были перед монтажом очищены изнутри, то все
твердые частицы, внесенные в трубопровод при его присоединении или
сварке (кусочки уплотнительной ленты, окалина после сварки, стружка
и т.д.), могут попасть внутрь пневмоаппаратов.
В системах, которые эксплуатировались продолжительное время, из-за
коррозии, вызываемой наличием конденсата, в воздух могут попасть
кусочки ржавчины. Особенно это касается трубопроводов, установленных
без антикоррозионной защиты.
В результате этого могут возникнуть:
залипание или заклинивание подвижных элементов,
утечки из-за неплотного прилегания клапанов к седлам,
засорение сопел и каналов небольшого диаметра.
Обслуживание
Регулярное обслуживание системы повышает срок и надежность
функционирования пневматической системы управления.
Для каждой пневматической системы должен составляться точный график
ее обслуживания, в котором приводится перечень работ по обслуживанию
и сроки их выполнения. Для больших систем управления должны
прилагаться диаграммы "путь-шаг" и принципиальные схемы системы.
Интервалы времени для проведения отдельных работ по обслуживанию
зависят от длительности эксплуатации системы и условий
взаимодействия отдельных элементов с окружающей средой.
Регулярно должны проводиться работы по обслуживанию подсистемы
подготовки воздуха и информационных устройств.
В подсистеме подготовки воздуха осуществляется:
проверка состояния, очистка или смена фильтра,
удаление конденсата,
заливка масла и настройка его подачи (если установлен
маслорас-пылитель).
Информационные устройства контролируются на износ и степень
загрязненности.
С большими интервалами времени могут проводиться следующие работы по
обслуживанию пневмосистемы:
проверка соединений на наличие утечек,
проверка креплений трубопроводов на подвижных частях,
Воздух является смесью газов и имеет следующий состав:
около 78 % объема составляет азот,
около 21 % объема - кислород.
Воздух также содержит небольшое количество двуокиси
углерода, аргона, водорода, неона, гелия, криптона и
ксенона. Для лучшего понимания законов природы, а также
свойств воздуха ниже представлены размерности физических
величин, которые используются в технической системе и в
международной системе измерений (СИ).
Основные величины
Величина
Обозначение
Единица измерения
Длина
I
Метр (м)
Масса
m
Килограмм (кг)
Время
t
Секунда (с)
Температура
Т
Градус Кельвина (К)
{0°С = 273,15К}
Производные величины
Величина Обозначение Единица измерения
Сила F Ньютон (Н), 1Н = 1 кг .м/с2
Площадь А Квадратный метр (м2)
Объем V Кубический метр (м3)
Объемный расход q (м3/с)
Давление р Паскаль (Па)
1Па=1Н/м21бар=
10.000 Па
Закон Ньютона: Сила = Масса. Ускорение F = m.a
При свободном падении ускорение свободного
падения g = 9,81 м/с2.
Давление: 1 Паскаль соответствует давлению вертикальной
силы 1 Н на поверхность площадью 1 м2
Давление, которое непосредственно воздействует на
поверхность земли, называется атмосферным давлением и
обозначается Ратм. Это давление часто называют базовым.
Превышение абсолютного давления Рабс над атмосферным
называют избыточным давлением (ризб), а недостаток
абсолютного давления до атмосферного - вакуум
метрическим давлением (Рвак). Абсолютное давление и
избыточное связаны формулой:
Ризб = Рабе - Ратм
Это соотношение отражено на рис.1.1.
Рис. 1.1. Давление воздуха
Атмосферное давление не является постоянным. Оно
изменяется в зависимости от географического места и
погодных условий. Диапазон изменения давления,
заключенный между линией абсолютного нуля и линией
атмосферного давления, называется диапазоном вакуума, а
диапазон, лежащий выше линии атмосферного давления,
диапазоном избыточного давления. Абсолютное давление
Рабс складывается из атмосферного и избыточного
давления, которое измеряется приборами, т.е. Рабс = Ратм
+ Ризб. Абсолютное давление приблизительно на 100 кПа (1
бар) больше избыточного давления.
В пневматике количество воздуха оценивается в так
называемом нормальном состоянии. По стандарту DIN 1343
нормальным состоянием жидкостей или газов является то
состояние, которое они принимают при нормальной
температуре и нормальном давлении:
нормальная температура Тн = 273,15 К = 0°С,
нормальное давление рн=
101325 Па = 1,01325 бар.
Характеристики воздуха
Для воздуха характерна незначительная сила сцепления между
молекулами, поэтому в нормальных условиях ею можно пренебречь . Как
и все газы, воздух не имеет собственной формы. Он полностью занимает
предоставленный объем.
Рис. 1.2. Закон Бойля-Мариотта
Закон Бойля-Мариотта
Воздух может сжиматься и расширяться. Это свойство описывается
законом Бойля-Мариотта: "При постоянной температуре объем данной
массы газа обратно пропорционален абсолютному давлению", т.е.
произведение абсолютного давления газа на его объем является
постоянной величиной для данной массы газа.
p1 *V1 =.....= const Пример расчета
Воздух, находящийся под атмосферным давлением, при помощи
компрессора сжимается до 1/7 его
прежнего объема. Какое давление зарегистрирует прибор в конце
сжатия, если этот процесс происходил при постоянной температуре?
p1* V1 = р2* V2
p2=
p1*V1/V2, где: V2/V1 = 1/7
p1= ратм= 100 кПа = 1 бар Р2 = 1*7 = 700 кПа = 7 бар
По полученному выше абсолютному давлению определяется избыточное
давление воздуха: ризб = рабс - ратм = (700 - 100) кПа = 600 кПа = 6
бар
Следовательно, компрессор, который сжимает воздух до избыточного
давления в 600 кПа, должен иметь степень сжатия 1:7.
Закон Гей-Люссака
Если нагреть воздух, имеющий температуру 273 К, в условиях
постоянного давления на 1 К, то его объем увеличится на 1/273
величины этого объема. Закон Гей-Люссака гласит: "При постоянном
давлении объем постоянной массы газа пропорционален его абсолютной
температуре".
где:
V1 - объем газа при температуре Ti , V2 - объем газа при температуре
Тг ,
Изменение объема V определяется по формуле:
Для V2 следует:
Воздух объемом 0,8 м3при
температуре T1 = 293 К (20 °С) нагревается до температуры Т2 = 344 К
(71 °С). Каково изменение объема воздуха?
Пример расчета
Если во время нагревания объем воздуха поддерживается постоянным, то
для изменения давления справедлива формула:
или
Закон Шарля
Уравнение состояния газа
Для постоянной замкнутой массы газа связь между его параметрами
(давлением, объемом и температурой) устанавливается следующим
уравнением состояния газа:
Из этого уравнения можно (как частные случаи) получить рассмотренные
выше законы изменения параметров газа, если поочередно считать
постоянными три параметра газа (р, V или Т):
=>
изобарический процесс
=>
изохорический процесс
=>
изотермический процесс
Давление р постоянно
Температура Т постоянна
Объем V постоянен
Глава 2
Производство и распределение сжатого воздуха
Подготовка сжатого воздуха
С целью обеспечения надежности работы пневматической системы
управления к ней необходимо подвести сжатый воздух высокого
качества. При этом оцениваются следующие параметры воздуха:
уровень давления,
влажность воздуха,
степень очистки воздуха.
Если не будут соблюдены перечисленные выше требования к
параметрам воздуха, то это может привести к увеличению
эксплуатационных расходов из-за роста времени простоя машин
и установок, а также увеличению затрат на ремонт и замену
вышедших из строя элементов.
Подготовка сжатого воздуха начинается уже с момента его
производства, но, если не принять специальных мер, на пути к
потребителям воздух может быть загрязнен. Тип компрессора и
его
техническое состояние оказывают большее или меньшее влияние
на количество твердых частиц, масла и воды, которые могут
попасть в пневматическую систему. В состав подсистемы
подготовки воздуха входят следующие элементы:
всасывающий фильтр,
воздушный компрессор, • воздушный ресивер,
осушитель воздуха,
воздушный фильтр с влагоотделителем,
редукционный клапан,
маслораспылитель (при необходимости),
дренажные (спускные) отверстия для удаления конденсата.
Из-за плохого качества воздуха увеличивается число аварий и
сокращается срок службы пневматической системы, что проявляется в
таких явлениях, как:
быстрый износ уплотнений и подвижных частей пневмоаппаратов и
исполнительных устройств,
замасливание клапанов,
загрязнение глушителей шума,
коррозия трубопроводов, пневмоаппаратов, цилиндров и других
элементов,
вымывание смазки подвижных частей.
В случае плохой герметичности пневмосистемы утекающий воздух может
попасть на обрабатываемые изделия (например, на пищевые продукты).
Уровень давления сжатого воздуха
Как правило, пневматические устройства промышленного назначения
проектируются на максимальное рабочее давление 800... 1000 кПа (8...
10 бар). Однако опыт эксплуатации показал, что из экономических
соображений целесообразнее использовать давление около 600 кПа (6
бар).
Сопротивление течению газа в отдельных элементах (например,
дроссели) и в трубопроводах рассчитывается таким образом, чтобы
суммарные потери давления в них составляли 10...50 кПа (0,1
...0,5 бар). Поэтому для того, чтобы нормальное рабочее давление в
пневмосистеме
было не ниже 600 кПа (6 бар), давление компрессорной установки
должно быть в пределах 650...700 кПа (6,5...7 бар).
Компрессоры
Выбор типа компрессора зависит от рабочего давления и
необходимого потребителю расхода воздуха. Различают
следующие типы компрессоров.
Рис. 2.1. Типы компрессоров
Поршневые компрессоры возвратно-поступательного действия
Объемный поршневой компрессор возвратно-поступательного
действия сжимает воздух, поступающий в его рабочий объем
через всасывающий клапан. Через напорный клапан воздух
подается в пневмосеть.
Компрессоры возвратно-поступательного действия находят
широкое применение, так как они обеспечивают получение
сжатого воздуха в широком диапазоне давления и расхода. Для
получения большого давления используют многоступенчатые
компрессоры, в которых воздух охлаждается между отдельными
ступенями компрессора.
71
Оптимальный диапазон давлений для таких компрессоров:
до
400 кПа
(4 бар)
одноступенчатое сжатие
до
1500кПа
(15 бар)
двухступенчатое сжатие
свыше
1500кПа
(15 бар)
трех- или многоступенчатое сжатие
Возможные, но не всегда экономичные диапазоны давлений:
до
1200кПа
(12 бар)
одноступенчатое сжатие,
до
3000 кПа
(30 бар)
двухступенчатое сжатие,
свыше
3000 кПа
(30 бар)
трех- или многоступенчатое сжатие
Мембранные компрессоры
Мембранные компрессоры принадлежат к группе объемных
компрессоров возвратно-поступательного действия, в которых
рабочий объем отделен от поршня мембраной. Достоинство этого
типа компрессоров заключается в том, что компрессорное масло
не может попасть в поток сжимаемого воздуха. Это особенно
важно там, где недопустимо попадание масла в воздух,
например в пищевой, парфюмерной или химической
промышленности.
Радиально-поршневые компрессоры
В радиально-поршневых компрессорах сжатие воздуха
осуществляется во вращающихся цилиндрах. Во время процесса
сжатия воздуха рабочий объем компрессора постепенно
уменьшается.
Винтовые компрессоры
В таких компрессорах два вала с профилем винтовой формы
вращаются друг относительно друга. При этом профили,
входящие один в другой, уменьшают рабочий объем, из которого
сжимаемый воздух вытесняется в сеть.
Лопастные компрессоры
Для большинства применяемых лопастных компрессоров
характерна большая производительность. Изготавливаются
лопастные компрессоры с аксиальным и радиальным
расположением лопастей. В них воздух приводится в движение с
помощью одного или нескольких турбинных колес. В лопастных
компрессорах кинетическая энергия движения воздуха
преобразуется в потенциальную энергию давления. В осевых
компрессорах воздух перемещается лопастями в осевом
(аксиальном) направлении течения потока.
Регулирование компрессоров
Для того, чтобы производительность компрессора
соответствовала потребляемому расходу воздуха, необходимо
осуществлять регулирование компрессора. Производительность
компрессора регулируется между максимальным и минимальным
уровнями значения давления. Имеются различные способы
регулирования компрессора.
Регулирование холостого хода компрессора
регулирование сбросом
регулирование запиранием,
регулирование коротким замыканием;
Регулирование по нагрузке
регулирование числом оборотов,
регулирование дросселированием на всасывании.
Релейное регулирование
Регулирование холостого хода компрессора
При регулировании сбросом компрессор "работает" на
предохранительный клапан. После достижения настроенного
значения регулируемого давления открывается
предохранительный клапан и воздух сбрасывается в окружающую
среду.
При регулировании запиранием перекрывается всасывающая
магистраль компрессора. Этот вид регулирования применяется
прежде всего для радиально-поршневых компрессоров.
Для больших объемных компрессоров применяется регулирование
"коротким замыканием", при котором во время части цикла
сжатия всасывающий клапан остается открытым. При этом
рабочий объем компрессора оказывается соединенным со
всасывающей магистралью и компрессор не может сжать воздух,
т.е. повысить его давление.
Регулирование по нагрузке
При регулировании по нагрузке в зависимости от давления в
напорной магистрали компрессора изменяется число оборотов
приводного мотора компрессора.
При регулировании дросселированием на всасывании
производительность компрессора поддерживается за счет
изменения сопротивления дросселя, установленного во
всасывающей
При этом виде регулирования компрессор работает на полной
нагрузке или останавливается. Приводной мотор компрессора
выключается при достижении давления, превышающего
максимальное рабочее давление Рмакс и включается при
достижении минимального рабочего дав- ления Рмин.
Продолжительность включения компрессора
Рекомендуется, чтобы продолжительность включенного состояния
компрессора была не выше 75%. При этом необходимо, чтобы
среднее и максимальное значения расхода воздуха
пневматической установки были определены, что важно для
выбора типа компрессора. Если предположить, что потребление
воздуха при модернизации установки увеличится, то необходимо
применять элементы системы управления и подготовки сжатого
воздуха, рассчитанные на больший расход воздуха. Иначе
последующая модернизация системы будет связана с большими
финансовыми расходами из-за необходимости модернизации
компрессорной станции заводской пневматической сети.
Ресивер сжатого воздуха
Для стабилизации давления воздуха за компрессором
устанавливается ресивер. Ресивер сжатого воздуха выравнивает
колебания давления при отборе воздуха из системы. Если
давление в ресивере опускается ниже определенного уровня, то
компрессор заполняет его до тех пор, пока давление вновь не
достигнет настроенного верхнего уровня. Преимущество такого
режима работы заключается в том, что компрессор не работает
непрерывно.
Благодаря относительно большой площади поверхности ресивера
сжатый воздух в нем охлаждается. При этом выделяется
конденсат, который необходимо регулярно удалять через
отводной кран.
Рис. 2.2. Ресивер сжатого воздуха
Размеры ресивера сжатого воздуха зависят от следующих
параметров системы:
производительности компрессора,
количества воздуха, потребляемого пневмосистемой,
допустимой емкости ресивера,
способа регулирования компрессора,
допустимого колебания давления в сети сжатого воздуха.
Рис. 2.3. Диаграмма: определение объема ресивера
Пример
3
Производительность компрессора qL=
20 м /мин
Изменение давления ∆Р - 100кПа(1бар)
Число переключений в час z = 20 час -1Результаты
расчетов по диаграмме VB =
15 м3
Осушители воздуха
При всасывании компрессором воздуха из окружающей среды в
него попадает вода. Влажность сжатого воздуха определяется
его относительной влажностью, которая зависит от температуры
и погодных условий.
Абсолютная влажность - это масса паров воды, содержащихся в
1 м3воздуха.
Влажность насыщенного пара - наибольшая масса паров воды,
которая может содержаться в 1 м3воздуха
при данной температуре.
Относительная влажность, измеряемая в процентах,
определяется по формуле:
Абсолютная влажность *100%
Относит. влажность = влажность насыщенного пара
Так как влажность насыщенного пара зависит от температуры,
то относительная влажность изменяется с изменением
температуры, даже если абсолютная влажность остается
постоянной.
Точка росы
Точкой росы называется температура, при которой
относительная влажность становится равной 100%. При
понижении температуры ниже тонки росы начинается конденсация
содержащихся в воздухе паров воды. Повышенная влажность
воздуха уменьшает долговечность пневматической системы.
Поэтому для ее снижения необходимо устанавливать осушители.
Применяются следующие способы осушки воздуха:
сушка при низкой температуре (рефрижераторная сушка),
адсорбционная сушка, • абсорбционная сушка.
Температура точки росы
При сравнении различных осушительных установок между собой
принимается во внимание значение рабочего давления установки и
температура точки росы воздуха, т.е. температура, которая
достигается в сушилке при рабочем давлении.
Температура точки росы осушаемого воздуха должна быть на 2 ... 3 °С
ниже температуры охлаждающей среды.
Снижение эксплуатационных расходов, сокращение времени простоя и
повышение надежности пневмосистем относительно быстро окупают
дополнительные затраты на установку осушителя воздуха.
Рефрижераторная сушка
Чаще всего в установках по осушке воздуха применяются
рефрижераторные (холодильные) осушители. Протекающий воздух
охлаждается в теплообменнике. Влага, содержащаяся в потоке воздуха,
выделяется и собирается в отстойнике. Входящий в осушитель воздух
предварительно охлаждается потоком выходящего холодного воздуха,
поступающего из теплообменника. Затем в рефрижераторном осушителе он
охлаждается еще на 2 ... 5 °С, Сухой воздух фильтруется. На выходе
из рефрижераторного осушителя воздух нагревается в теплообменнике от
потока входящего воздуха. Используя методы рефрижерации, можно
получить значение точки росы в интервале 2 ... 5
°С.
Рис. 2.4. Рефрижераторный осушитель
Адсорбционный осушитель
Адсорбция - процесс поглощения вещества из газа или жидкости
поверхностью твердого тела. Осушающее вещество, которое также
называют гелем, имеет форму гранул, в состав которых обычно входит
оксид силиция.
На практике всегда используются две емкости. Когда гель в одном из
адсорберов пропитывается водой, поток воздуха переключается на
другой адсорбер с сухим гелем, а первый тем временем осушается
горячим воздухом.
Рис. 2.5. Адсорбционный осушитель
Абсорбционный осушитель
Абсорбция - это чисто химический процесс, при котором твердое тело
или жидкость поглощает газообразное вещество. Из-за высоких
эксплуатационных расходов этот вид сушки применяется очень редко.
Рис. 2.6. Абсорбционный осушитель
С помощью фильтра на входе в осушитель воздух очищается от больших
капель воды и масла. Это достигается за счет закручивания потока
сжатого воздуха перед входом в сушильную камеру, где вода
соединяется с флюсом, т.е. с осушающим веществом. Затем это жидкое
соединение поступает в сборник, размещенный в нижней части
осушителя.
Получаемое соединение должно регулярно удаляться, а флюс регулярно
заменяться.
Положительными сторонами процесса абсорбции являются:
простота оборудования,
низкий механический износ из-за отсутствия в осушителе
подвижных частей,
отсутствие подвода энергии извне.
На выходе осушителя должен быть установлен пылеулавливатель для
отделения от воздуха частиц флюса.
При этом может быть получена температура точки росы ниже О °С.
Рис. 2.7. Кривая
точки росы
Дано:
Производительность установки, приведенная к давлению
во всасывающей магистрали 1000 м3/час
Абсолютное давление 700 кПа (7 бар)
Производительность установки, приведенная
кдавлению в напорной магистрали 143 м3/час
Температура воздуха
во всасывающей магистрали 293 К (20 °С)
Температура воздуха
внапорной магистрали 313 К (40
°С)
Относительная влажность 50%
Пример расчета
При 293 К (20 °С) имеется следующая взаимосвязь относительной и абсолютной
влажностей до сжатия воздуха:
100%-17,3 г/м3,
50% - 8,65 г/м3.
Отсюда определяется количество водяного пара, поступающего в систему:
8,65 г/ м3.1000
м3/час
= 8650 г/час
При 313 К (40 °С) имеется следующая взамосвязь относительной и
абсолютной влажностей после сжатия воздуха:
Отсюда определяется предельное количество водяного пара, которое может
содержатся в системе:
При этом выделившееся после сжатия воздуха количество воды составляет:
Распределение сжатого воздуха
Для того чтобы гарантировать надежную и безаварийную работу
системы распределения воздуха, необходимо выполнить ряд
требований. При этом, безусловно, важно соблюдение рекомендаций
по размерам трубопроводов, материалам, из которых они выполнены,
условному проходу местных сопротивлений, порядку расположения
труб и правилам обслуживания пневмосистемы.
Размеры системы трубопроводов
На случай последующего монтажа новых пневмосистем следует
предусмотреть возможность расширения сети сжатого воздуха.
Поэтому размеры основной магистрали питания сжатым воздухом,
определяемые техническими требованиями, должны быть рассчитаны с
определенным запасом. Это впоследствии позволит легко расширить
систему, используя заглушки и отсечные клапаны.
Во всех трубопроводах имеются потери давления из-за
сопротивления течению потока, причиной которых являются потери
на трение и особенно потери в местных сопротивлениях (сужения,
расширения проходных сечений, повороты потока, разветвления и
т.п.). Эти потери должны преодолеваться напором (давлением)
компрессора. Потери давления во всей сети должны быть, по
возможности, меньшими.
Для расчета потерь давления необходимо знать общую приведенную
длину трубопроводов. Местные сопротивления при расчете
заменяются сопротивлением трубопроводов эквивалентной длины.
Внутренний диаметр трубопроводов, который лучше всего определять
с помощью специальных номограмм, также зависит от рабочего
давления и производительности компрессора.
Потери давления
Любое препятствие на пути потока воздуха или изменение
направления его движения внутри системы трубопроводов вызывает
падение давления (увеличение сопротивления потоку). Это приводит
к постоянным потерям давления в системе трубопроводов. Так как
любая система питания сжатым воздухом не может обойтись без
различных поворотов, разветвлений, элементов соединений
трубопроводов, вентилей, задвижек и т.п., то избежать такого
падения давления не удается.
Но его можно значительно снизить за счет оптимальной
конфигурации системы трубопроводов и выбора подходящего
материала для них, а также правильного соединения и установки в
них необходимых элементов.
Материал трубопроводов
Современные системы питания сжатым воздухом предъявляют
определенные требования к сети трубопроводов, которая должна
обеспечивать:
минимальные потери давления,
герметичность,
стойкость против коррозии,
возможность модернизации системы.
При этом обращается внимание не только на стоимость труб и
других элементов системы сжатого воздуха, но также и на
стоимость монтажа. Наименьшая стоимость монтажа у
пластмассовых трубопроводов. Применение герметиков при
стыковке пластмассовых трубопроводов обеспечивает 100%
герметичность и облегчает перемонтаж в случае модернизации
системы.
Медные и стальные трубопроводы более дешевы, но требуют
антикоррозийного покрытия, а их сопряжение друг с другом
осуществляется с помощью сварки или резьбовых соединений.
Если монтаж такой системы трубопроводов произведен небрежно,
то в нее могут попасть кусочки окалины, стружки, застывшие
капли металла или обрезки уплотнительного материала, что
может привести ко многим неисправностям.
Для систем с трубопроводами, имеющими небольшой и средний
размер внутреннего диаметра, самыми подходящими с точки
зрения стоимости, удобства монтажа, обслуживания и
возможности модернизации являются пластмассовые
трубопроводы.
Необходимо обеспечивать надежный монтаж трубопроводов, так
как иначе может возникнуть разгерметизация трубопровода
из-за раскручивания соединений.
Рис. 2.8. Система снабжения сжатым воздухом
Расположение трубопроводов
Кроме правильного выбора размеров и материала трубопроводов,
решающим фактором в обеспечении экономичной работы системы
питания сжатым воздухом является расположение трубопроводов
(конфигурация системы трубопроводов). Сжатый воздух
поступаете систему от компрессора не непрерывным потоком, а
по мере необходимости. При этом часто бывает так, что воздух
расходуется потребителем в большом количестве лишь в
короткие промежутки времени. Все это может привести к сбою в
работе системы питания. Поэтому основной линии питания
рекомендуется придавать кольцевую форму, так как это
обеспечивает относительное постоянство давления в магистрали
питания.
Рис. 2.9. Кольцевой трубопровод
Для того, чтобы ремонт и модернизация трубопроводов не
нарушали работу всей системы питания, желательно с помощью
запорных клапанов разделить ее на отдельные секции.
Благодаря применению тройниковых соединений и трубопроводов
с заглушками на концах появляется возможность, по мере
надобности, подключения ответвлений для новых устройств,
потребляющих сжатый воздух. Эти ответвления должны
оборудоваться стандартными запорными кранами или обратными
клапанами.
Рис. 2.10. Сеть трубопроводов
Несмотря на самое тщательное отделение и отвод конденсата в
установках по производству сжатого воздуха, падение давления
и охлаждение окружающим воздухом могут вызвать образование
конденсата и в системе трубопроводов. Чтобы он не увлекался
потоком воздуха к потребителям, а собирался в определенных
местах, откуда его было бы удобно отвести, все трубопроводы
при
79
установке должны иметь уклон к горизонтали 1-2%. Это можно
осуществить независимо на отдельных участках трубопровода.
Конденсат должен выводиться из самой нижней точки сети
трубопроводов.
Система подготовки сжатого воздуха
Различные функции системы подготовки сжатого воздуха (фильтрация,
регулирование и смазка элементов пневмосистемы) могут выполняться
отдельными элементами или одним устройством - блоком подготовки сжатого
воздуха.
Фильтр сжатого воздуха
В современных пневматических системах подача смазки в сжатый воздух не
всегда нужна. Это делается только в случае необходимости и, прежде
всего, для смазки элементов исполнительной части системы. Влага,
загрязнения и избыток масла могут привести к износу движущихся частей и
уплотнений пневматических устройств. Из-за негерметичности соединений
эти вещества могут вытекать наружу. И если не применять воздушный
фильтр, то можно нанести вред обрабатываемым продуктам (например, в
пищевой, парфюмерной и химической промышленности).
Рис. 2.11.
Фильтр сжатого воздуха
Выбор воздушного фильтра играет важную роль для обеспечения
пневматической системы сжатым воздухом хорошего качества. Параметром
фильтра сжатого воздуха является размер ширины ячейки фильтрующего
элемента, от которого зависит размер наименьших частиц, задерживаемых
фильтром. Собранный конденсат должен удаляться из отстойника прежде, чем
он достигнет верхнего уровня, иначе конденсат вновь будет вовлекаться в
движение потоком воздуха.
При постоянном поступлении конденсата его целесообразно удалять
автоматически, а не вручную. Однако и в этом случае также следует
определить причины поступления конденсата. Например, неправильно
проложенные трубопроводы могут служить причиной поступления конденсата в
систему. Автоматическое устройство для отвода конденсата содержит
поплавок, который при достижении определенного предельного уровня
конденсата открывает с помощью рычага сопло. Протекающий через сопло
сжатый воздух, воздействует на поршень затвора седельного клапана,
открывая канал для удаления конденсата из корпуса
фильтра-влагоотделителя. Если поплавок достигает своего нижнего уровня,
то сопло закрывается и процесс сброса конденсата прекращается. При этом
также возможно и ручное удаление конденсата из его накопителя.
Входящий в воздушный фильтр сжатый воздух протекает через направляющий
аппарат, который приводит воздух во вращательное движение. Под
воздействием центробежных сил частицы воды и твердые загрязнения
выделяются из потока воздуха. Они устремляются к внутренней стенке
корпуса фильтра. Предварительно очищенный воздух затем протекает через
фильтрующий элемент. Здесь происходит дальнейшее отделение частиц
загрязнений, размеры которых больше, чем ширина ячеек фильтрующего
элемента. В нормальных фильтрах размеры ячеек находятся в диапазоне
5...40 мкм. Под степенью фильтрации фильтра понимается процент твердых
частиц определенного размера, которые могут отделяться от потока
воздуха. Например, степень фильтрации 99,99% касается размеров частиц от
5 мкм. В фильтрах тонкой очистки могут отфильтровываться 99,999% частиц
величиной более 0,01 мкм.
При длительной эксплуатации установки фильтрующий элемент необходимо
заменять, так как он может засориться отфильтрованными частицами. С
увеличением степени загрязненности фильтра возрастает его сопротивление
потоку газа. Поэтому потери давления на фильтре становятся больше. Для
определения срока замены фильтра необходимо проводить визуальный
контроль или измерение перепада давления на фильтре.
Обслуживание
Периодичность замены фильтрующего элемента зависит от состояния сжатого
воздуха, от количества воздуха, потребляемого пневматической системой, и
от размеров фильтра.
Обслуживание фильтра предполагает:
замену или очистку фильтрующего элемента,
удаление конденсата.
При выполнении работ по очистке фильтра должны использоваться
чистящие вещества, рекомендуемые производителем фильтрующего
элемента.
Регулятор давления
Давление сжатого воздуха, поступающего от компрессора, подвержено
колебаниям. Эти колебания давления питания отрицательно сказываются
на скорости движения цилиндров и на характеристиках переключения
клапанов, дросселей, реле времени и распределителей с памятью.
Таким образом, постоянство давления питания является необходимым
условием нормальной работы пневматических систем управления. Чтобы в
пневмосистеме поддерживать постоянное давление питания, за фильтром
сжатого воздуха ( по течению потока) устанавливается регулятор
давления (редукционный клапан), задачей которого является
поддержание постоянного давления на выходе, несмотря на колебания
давления и изменения расхода сжатого воздуха на входе. Установка в
систему нескольких регуляторов давления позволяет независимо друг от
друга поддерживать различные давления питания в отдельных ее частях.
На практике установлено, что наилучшими и с экономической, и
стехнической точки зрения значениями давления питания являются:
600 кПа (6 бар) - для исполнительной части пневмосистемы и
300...400 кПа (3...4 бар) - для управляющей части.
Более высокий уровень давления приведет к неэкономичному
расходованию энергии и ускорению износа элементов пневмосистем,
тогда как более низкий уровень давления отрицательно скажется на
эффективности работы пневмоэлементов и, прежде всего, элементов
исполнительной части.
Регулятор давления с разгрузочным отверстием. Принцип работы
Давление на входе регулятора давления всегда должно быть больше, чем
на выходе. Регулятор автоматически поддерживает давление на выходе с
помощью мембраны. Выходное давление воспринимается мембраной, на
которую с другой стороны воздействует пружина, а проходное
поперечное сечение седельного клапана уменьшается или закрывается
полностью. Седельный клапан открывается мембраной, и сжатый воздух
может через разгрузочное и вентиляционное отверстия в корпусе
вытекать в атмосферу.
Если выходное давление упадет, то силой пружины клапан открывается.
Таким образом, поддержание предварительно настроенного значения
рабочего давления осуществляется за счет постоянного изменения
проходного сечения седельного клапана, что вызывает изменение
расхода протекающего через него сжатого воздуха и, как следствие,
значения рабочего давления. Настройка выходного давления проводится
путем изменения предварительного поджатия пружины с помощью
регулировочного винта.
Рис. 2.12. Регулятор давления с разгрузочным отверстием
Регулятор давления без разгрузочного отверстия
Рис. 2.13. Регулятор давления без разгрузочного отверстия
Принцип действия
С увеличением рабочего давления (давление на выходе регулятора)
поднимается давление над мембраной клапана, уравновешенной с другой
стороны силой пружины. Одновременно уменьшается или полностью
закрывается проходное поперечное сечение седельного клапана. Расход
воздуха уменьшается или прерывается полностью. Поток сжатого воздуха
может снова появиться, если давление на выходе станет меньше
предварительно настроенного значения.
Маслораспылитель
В современных пневмосистемах обычно в сжатый воздух масло не
подается. Если подвижные части цилиндров, пневмомоторов и клапанов
нуждаются во внешней смазке, то воздух предварительно обогащается
маслом и подается только к тем элементам установки, которые
нуждаются в смазке.
Масло, попадающее в сжатый воздух из компрессора, не пригодно для
смазки пневматических устройств.
Цилиндр с теплостойкими уплотнениями не должен работать с воздухом,
обогащенным смазкой, так как консистентная смазка, заложенная в
теплостойкие уплотнения при сборке, может вымываться маслом из
цилиндра.
Если системы, которые эксплуатировались на воздухе, обогащенном
смазкой, переводятся на воздух без смазки, то необходимо обновить
собственную оригинальную смазку цилиндров, пневмомоторов и клапанов,
так как она могла быть вымыта в ходе эксплуатации.
Рис. 2.14. Маслораспылитель
Сжатый воздух должен обогащаться маслом только в тех случаях, если:
осуществляются процессы движения с большой скоростью,
устанавливаются цилиндры с большим внутренним диаметром.
В последнем случае маслораспылитель должен размещаться
непосредственно перед входом в полости цилиндра.
При избыточной подаче масла могут возникнуть следующие проблемы:
нарушение работы элементов системы,
повышенное загрязнение окружающей среды,
залипание элементов системы после длительного пребывания в покое.
Принцип действия
Протекающий через маслораспылитель поток сжатого воздуха вызывает,
благодаря эффекту сжатия потока, падение давления между резервуаром
с маслом и камерой распыления. Этого перепада давления оказывается
достаточно, чтобы масло могло подниматься по вертикальной трубке
вверх и далее через канал подвода попадать в виде капелек в камеру
распыления, стенки которой для удобства наблюдения за процессом
выполняются прозрачными. Здесь масло распыляется в воздушном потоке
и попадает в виде масляного тумана в основной поток воздуха, который
транспортирует его в пневматическую систему.
Настройка маслораспылителя
Нормальным считается расход масла из расчета 1 ... 10 капель на 1 м3сжатого
воздуха. Правильная дозировка может проверяться с помощью кусочка
белого картона или бумаги, которые располагают на расстоянии
примерно 10 см от выхлопного отверстия управляющего распределителя и
держат его
так в течение некоторого времени работы системы, пока на нем не
появится желтоватый налет масла. В зависимости от времени его
появления делают вывод о правильности настройки мас- лораспылителя.
Отложение капелек масла на бумаге свидетельствует о необходимости
уменьшить его дозировку путем перенастройки масло-распылителя.
Обслуживание маслораспылителя
Масло, попадающее в сжатый воздух из компрессора, нельзя
использовать для смазки исполнительных устройств пневмосистем. При
работе компрессора выделяется много тепла, масло обогащается
углеродом, а его пары улетучиваются. Это вызывает ускоренный
абразивный износ в цилиндрах и распределителях, в результате чего
срок их службы значительно сокращается. Кроме того, масло, которое
скапливается на внутренних поверхностях трубопроводов, вовлекается в
движение потоком воздуха. Это вовлечение в движение скоплений масла
не является контролируемым и может повышать загрязнение воздушных
трубопроводов. Загрязненный изнутри маслом трубопровод уже не может
быть очищен без его демонтажа.
Помимо этого, чрезмерное количество масла в воздухе способствует
залипанию элементов пневмосистемы после некоторого времени ее
бездействия (например, после выходных и праздничных дней). После
включения системы загрязненные маслом элементы могут в начале давать
сбои в работе.
Масло, предназначенное для смешения со сжатым воздухом, должно
подаваться только в снабжаемую им часть пневмосистемы. Для этого
маслораспылитель лучше всего устанавливать непосредственно перед
нуждающимися в смазке устройствами. Для управляющей части системы
должны выбираться самосмазывающиеся элементы, т.е. элементы, которые
способны функционировать без жидкостной смазки.
Поэтому основное правило гласит: предпочтительнее использование
пневмосистем, которые работают на сжатом воздухе, не обогащенном
жидкой смазкой.
В заключение необходимо обратить внимание на следующее:
Компрессорное масло не должно попадать в сеть сжатого воздуха (для
этого в системе должен быть установлен маслоотделитель).
Следует использовать только такие устройства, которые могут работать
на воздухе, не содержащем масла.
Системы, которые некоторое время эксплуатировались на воздухе,
обогащенном маслом, должны и дальше работать на таком воздухе, так
как они уже утратили смазку, заложенную в элементы системы при их
сборке.
Блок подготовки воздуха
Размеры блока подготовки воздуха определяются величиной расхода
воздуха. При большем расходе воздуха возникают большие потери
давления в элементах системы. Поэтому, безусловно, необходимо
соблюдать рекомендации изготовителя, касающиеся технических
характеристик блока.
Рабочее давление не должно превышать значения, допустимого для блока
подготовки воздуха. Температура окружающей среды не должна превышать
50 °С , т.е. максимального значения температуры, допустимого для
корпусов, изготовленных из пластмасс.
Рис. 2.15. Блок подготовки воздуха: принцип действия
Рис. 2.16. Блок подготовки воздуха: условные обозначения
Обслуживание блоков подготовки воздуха
При обслуживании блоков подготовки воздуха должны регулярно
проводиться следующие мероприятия.
Фильтр сжатого воздуха.
Проверяется уровень конденсата в корпусе фильтра с целью исключения
превышения установленного значения. В противном случае конденсат
будет увлечен потоком сжатого воздуха в трубопроводы. Для отвода
конденсата из корпуса фильтра необходимо открыть дренажный вентиль
внизу корпуса. В случае загрязнения фильтрующего элемента, его
необходимо очистить или заменить.
Редукционный клапан.
Не требует постоянного обслуживания, если не предполагается ремонт
или замена.
Маслораспылитель.
В случае установки маслораспылителя необходимо постоянно проверять
уровень масла в корпусе и качество распыления его в воздушном потоке
(через прозрачный колпачок сверху корпуса). Для смазки элементов
пневмосистемы должно применяться только минеральное масло.
Пластмассовые корпуса фильтра и маслораспылителя нельзя промывать
трихлорэтиленом и подобными растворителями.
Глава 3
Исполнительные устройства и выходные приборы
Исполнительные устройства предназначены для преобразования энергии
сжатого воздуха в работу. Сигнал на перемещение исполнительного
устройства вырабатывается логико-вычислительной подсистемой и
передается ему через управляющий распределитель. Исполнительные
устройства относятся к выходным элементам пневматической системы. К
выходным элементам относятся также индикаторы - приборы, которые
показывают состояние системы управления или ее исполнительных
устройств.
Пневматические исполнительные устройства разделяются на две группы -
устройства с поступательным и с вращательным движением выходного
звена:
устройства с поступательным (линейным) движением:
цилиндры одностороннего действия,
цилиндры двустороннего действия;
устройства с вращательным (ротационным) движением:
пневмомоторы,
пневмоцилиндры с вращательным движением выходного звена,
поворотные пневмоцилиндры.
Цилиндр одностороннего действия
В цилиндре одностороннего действия сжатый воздух
воздействует на поршень только с одной стороны, с другой
стороны полость цилиндра всегда соединена с атмосферой.
Такой цилиндр может совершать работу только в одном
направлении. Возврат поршня в исходное положение
осуществляется под действием упругого элемента (обычно
пружины) или внешней силы. Сила упругости встроенной в
цилиндр пружины подбирается таким образом, чтобы поршень без
нагрузки возвращался в исходное положение с относительно
большой скоростью, приблизительно равной скорости рабочего
хода при отсутствии нагрузки.
Рис. 3.1. Цилиндр одностороннего действия
Ход цилиндров одностороннего действия со встроенной пружиной
ограничен длиной пружины в свободном состоянии. Поэтому
такие цилиндры имеют длину хода, равную примерно 80 мм.
Благодаря простой конструкции цилиндры одностороннего
действия применяются там, где нужны компактность и небольшие
перемещения:
подача заготовок,
обрезка,
соединение деталей,
зажим заготовок,
извлечение деталей,
штамповка.
Конструкция
Поршни цилиндров одностороннего действия имеют всего одно
уплотнение, обращенное рабочей стороной к поршневой полости, в
которую подается сжатый воздух. Уплотнение изготавливается из
упругого материала (пербунан), устанавливаемого в металлический или
пластмассовый поршень. При движении уплотнения его кромки скользят
по внутренней поверхности цилиндра, при этом воздух из штоковой
полости свободно выходит в атмосферу через вентиляционное отверстие,
защищенное фильтром или сетчатой крышкой от попадания загрязнений
извне.
К цилиндрам одностороннего действия также относятся мембранные
цилиндры:
цилиндры с плоской мембраной,
цилиндры с чулочной мембраной.
В мембранных цилиндрах в зависимости от их назначения применяются
встроенные мембраны, выполненные из резины, пластмассы или металла.
Шток поршня закреплен концентрично на мембране. Поскольку в
мембранных цилиндрах отсутствуют трущиеся части, то силы трения в
них минимальные. Такие цилиндры имеют совсем небольшой ход, и
поэтому используются для зажима, тиснения и подъема деталей.
Рис. 3.2. Мембранный цилиндр
Цилиндры двустороннего действия
Рис. 3.3. Цилиндр двустороннего действия
Конструкция цилиндра двустороннего действия аналогична
конструкции цилиндра одностороннего действия. Однако здесь
уже нет возвратной пружины, так как теперь два
присоединительных отверстия используются для подвода воздуха
к рабочим полостям цилиндра и его отвода. Цилиндр
двустороннего действия позволяет совершать работу в двух
направлениях движения штока. Это делает его более
универсальным. При прямом ходе, когда шток цилиндра
выдвигается, развиваемое им усилие несколько больше, чем при
обратном ходе, когда шток втягивается, так как площадь
поршня, на которую действует сжатый воздух со стороны
поршневой полости, больше, чем со стороны штоковой полости,
на величину площади поперечного сечения штока.
Направления совершенствования цилиндров
Совершенствование пневматических цилиндров идет в следующих
направлениях:
установка магнитов на поршни цилиндров для управления бесконтактными
датчиками положения (пневматическими и электрическими),
демпфирование поршня в конце его хода при больших нагрузках на
штоке,
применение бесштоковых цилиндров в условиях ограниченного
пространства,
использование новых конструктивных материалов, например, пластмасс,
применение защитных покрытий от вредного влияния окружающей среды,
например антикислотное покрытие,
увеличение развиваемого усилия,
совершенствование цилиндров с непроворачивающимся штоком, а также
цилиндров с полым поршнем и штоком для вакуумных захватов роботов с
пневматическим приводом.
Цилиндр с демпфированием в конечных положениях
Рис. 3.4. Цилиндр двустороннего действия с демпфированием в конечных
положениях
Чтобы избежать сильных ударов поршня о крышки цилиндра и поломки
цилиндра в случае перемещения больших масс, применяют демпфирование
в конечных положениях.
На некотором расстоянии от упора демпфирующий поршень перекрывает
отверстие, по которому воздух свободно выходит из полости цилиндра.
Теперь воздух вытекает через очень маленькое отверстие, проходное
сечение которого может изменяться с помощью регулировочного винта.
При этом увеличивается сопротивление протоку воздуха и повышается
давление перед поршнем. На последней (тормозной) части хода поршня
его скорость значительно снижается. Однако при чрезмерном уменьшении
сечения поршень может не дойти до крайнего положения.
При значительных передаваемых усилиях и больших ускорениях движения
поршня следует принимать дополнительные меры предосторожности. Для
того, чтобы усилить эффект торможения, устанавливаются внешние
тормозные демпферы.
Настройка замедления поршня в конце хода осуществляется следующим
образом:
регулировочный винт полностью закрывается,
регулировочный винт вновь постепенно открывается до тех пор,
пока не будет получен желаемый эффект торможения поршня
(отсутствие удара и остановка в конце хода).
Тандем-цилиндр
Этот цилиндр представляет собой два цилиндра двустороннего действия
с общим штоком, объединенные в одном корпусе. При одновременной
подаче сжатого воздуха под оба поршня такой цилиндр развивает почти
вдвое большее усилие, чем обычный цилиндр с таким же диаметром
поршня и штока. Тандем-цилиндры применяются там, где при
ограниченных поперечных размерах цилиндра (диаметре) необходимо
развивать значительные усилия.
Рис. 3.5. Тандем-цилиндр
Цилиндр с проходным штоком поршня
Этот цилиндр имеет шток с обеих сторон поршня, т.е. шток является
проходным. В такой конструкции цилиндра улучшаются условия работы
трущихся поверхностей поршня и штока, так как шток опирается на две
опоры. Усилия, развиваемые цилиндром, являются одинаковыми в обоих
направлениях движения.
Проходной шток может быть полым и через него можно пропускать сжатый
воздух. Кроме того, к нему
можно присоединять вакуумные присоски.
Рис. 3.6. Цилиндр с проходным штоком поршня
Многопозиционный цилиндр
Многопозиционные цилиндры состоят из двух или более цилиндров
двустороннего действия. Цилиндры соединены соосно один с другим.
Воздух может подаваться независимо в различные полости цилиндров,
что обеспечивает выдвижение или втягивание отдельных цилиндров. При
двух цилиндрах с различными ходами получается четыре различных
конечных положения.
Ударный цилиндр
Сила давления пневматического цилиндра ограничена. Цилиндр, в
котором формируется большая кинетическая энергия, называется ударным
цилиндром. Большое значение кинетической энергии получается за счет
повышения скорости поршня. Скорость поршня ударного цилиндра лежит в
диапазоне 7,5... 10 м/с. Однако при большом ходе скорость движения
штока значительно меньше. Поэтому при больших ходах ударные цилиндры
не находят применения.
Рис. 3.8. Ударный цилиндр
При срабатывании управляющего распределителя давление подается в
полость А. Поршень сдвигается в направлении Z, открывается вся
площадь торцевой поверхности поршня. Воздух через большое проходное
сечение С может почти без сопротивления поступать в поршневую
полость цилиндра. Поршень эффективно ускоряется, приобретая большую
кинетическую энергию. При взаимодействии с преградой деформируемым
или разрушаемым предметом) из-за резкого тормо- жения поршня его
кинетическая энергия преобразуется в потенциальную
Цилиндр с вращательным движением выходного звена
энергию, создавая большую силу. В рассматриваемой конструкции этого
типа цилиндров шток цилиндра двустороннего действия соединен с
зубчатой рейкой, посредством которой он вращает зубчатое колесо,
преобразуя линейное движение во вращательное. Диапазон поворота
зубчатого колеса различен: от 45° до 360°. Вращательный момент
зависит от давления, площади поршня и коэффициента преобразования
пары рейка-шестерня и может достигать 150 Нм.
Рис. 3.9. Цилиндр с вращательным движением выходного звена
Поворотный цилиндр
В поворотном цилиндре сила на выходной вал передается
непосредственно через поворотную лопасть. Угол поворота может
бесступенчато изменяться от 0° до почти 180° . Вращающий момент
обычно не превышает 10 Нм.
Рис. 3.10. Поворотный цилиндр
Свойства поворотного цилиндра:
компактность и надежность,
совместимость с бесконтактными датчиками,
регулируемость угла поворота,
простота монтажа.
Бесштоковые цилиндры
При разработке бесштоковых цилиндров используется три
различных принципа построения конструкции:
ленточные или тросовые цилиндры,
цилиндры с ленточным уплотнением продольного шлица цилиндрической
трубы,
цилиндры с магнитной муфтой.
По сравнению с обычным цилиндром двустороннего действия бесшто-ковый
цилиндр обладает меньшей длиной конструкции. Случаи поломки штока
поршня исключаются полностью. Бесштоковый цилиндр может применяться
при больших ходах: вплоть до 10 м. Приспособления, нагрузка и другие
устройства могут крепиться непосредственно на монтажной поверхности
каретки или на внешних салазках.
Ленточный цилиндр
Ленточный цилиндр передает силу от поршня на каретку с помощью
охватывающей его ленты. При выходе из рабочего объема цилиндра лента
проходит через уплотнения в крышках цилиндра.
Очистительное устройство предназначено для того, чтобы никакие
загрязнения не переносились лентой к направляющему ролику.
Рис. 3.11. Ленточный цилиндр
Цилиндр с ленточным уплотнением продольного шлица
В этом типе цилиндров вдоль всей длины корпуса выполнен сквозной
шлиц (прорезь). Внешняя сила передается на каретку, которая жестко
соединена с поршнем. Это соединение осуществляется с помощью
элемента, скользящего в шлице корпусной трубы цилиндра. Уплотнение
шлица обеспечивается стальной лентой, которая прилегает к внутренней
стороне шлица. Каждая полость цилиндра герметизирована своими
уплотнениями, установленными на поршне. Между этими уп-
лотнениями лента изгибается и проходит под элементом, соединяющим
поршень с кареткой. Вторая лента уплотняет шлиц снаружи, что
защищает цилиндр от попадания загрязнений извне.
Рис. 3.12. Цилиндр с ленточным уплотнением
Цилиндр с магнитной муфтой
Такой пневматический цилиндр двустороннего действия состоит из
цилиндрического корпуса, бесштокового поршня и подвижной внешней
каретки, скользящей по внешней поверхности корпуса цилиндра, имеющей
в поперечном сечении форму круга. На поршне и на каретке размещены
постоянные магниты, взаимодействующие между собой, т.е. передача
усилия для перемещения нагрузки от поршня к каретке осуществляется с
помощью магнитной муфты. После подачи воздуха в полость цилиндра
синхронно с поршнем перемещается каретка. Полость цилиндра выполнена
герметичной и не имеет никаких подвижных уплотнений, граничащих с
окружающей средой, что полностью исключает возможность утечек
воздуха из цилиндра.
Рис. 3.13. Цилиндр с магнитной муфтой
Устройство цилиндра
Цилиндр состоит из корпуса, глухой и сквозной крышек, поршня
с уплотнениями, штока, уплотнения штока (сальник или манжета
в сквозной крышке), направляющей втулки, грязесъемного
кольца и соединительных деталей.
Корпус цилиндра (1) обычно изготавливается из цельнотянутой
стальной трубы. Чтобы продлить срок службы уплотнений
поршня, внутреннюю поверхность трубы подвергают механической
обработке с достаточно высокой чистотой поверхности. В
отдельных случаях корпус цилиндра может быть изготовлен из
алюминия, бронзы или стали с хромированием внутренней
поверхности. Такие цилиндры применяются при нерегулярном
режиме работы и в тех случаях, когда есть опасность
коррозии.
Глухая (2) и сквозная (3) крышки цилиндра обычно
изготавливаются литьем из алюминия или ковкого чугуна с
последующей механической обработкой. Присоединяются они к
корпусу с помощью резьбовых шпилек, фланцев или просто
резьбы.
Шток (4) чаще всего изготавливается из закаленной стали с
добавлением небольшого количества хрома против коррозии.
Резьба на конце штока обычно накатывается во избежание
появления трещин и изломов.
Для уплотнения по штоку в сквозной крышке цилиндра
устанавливается манжета (5) из упругого материала. Втулка
(6), служащая направляющей для штока, может быть изготовлена
из бронзы или металла с пластиковым покрытием.
Перед втулкой в сквозную крышку вставлено грязесъемное
кольцо (7), которое предотвращает попадание внутрь цилиндра
пыли и мелких твердых частиц. Складывающийся защитный кожух
в промышленных пневмоцилиндрах общего назначения обычно не
используется.
Рис. 3.14. Устройство пневматического цилиндра
В качестве материала для двойной манжеты (8) поршня
применяются:
от-20°С
до+ 80 °С,
от-20°С
до+ 150°С,
от-80°С
до + 200°С.
пербунан
витон
тефлон
Для уплотнения неподвижных соединений используются
О-образные кольца (9) из упругого или мягкого материала.
Рис. 3.15. Виды уплотнений цилиндра
Способы крепления цилиндров
Рис. 3.16. Способы крепления цилиндров
Способ крепления цилиндра зависит от места его размещения в
конструкции машины или установки. Цилиндр может иметь
постоянное крепление, если нет необходимости изменять его в
ходе эксплуатации. Но оно может быть выполнено и по
модульному принципу, позволяющему в случае необходимости
изменять способ крепления. Это в значительной степени
облегчает складирование и хранение цилиндров, особенно когда
они необходимы в больших количествах. При этом используется
базовая конструкция цилиндра и все детали его крепления.
Установка цилиндра и присоединение нагрузки к штоку должны
производиться в полном соответствии с условиями его
применения, поскольку нагружать цилиндр можно только в
осевом направлении.
При передаче усилия от цилиндра к машине или другой
установке возникают напряжения в корпусе и штоке цилиндра,
которые обычно рассчитывают без учета несоосности деталей.
При плохом сопряжении деталей цилиндра или их несоосности
могут возникнуть нагрузки "нерасчетного" характера, которые
вызывают:
ускорение износа кромок направляющей втулки из-за возрастания
контактных напряжений,
увеличение контактных напряжений в направляющих штока,
увеличение и неравномерное распределение напряжений на уплотнениях
поршня и штока,
увеличение изгибающих напряжений в штоке, особенно в цилиндрах с
большим ходом.
Основные характеристики цилиндра
Внешние характеристики цилиндра могут рассчитываться
теоретически или на основании технических данных
изготовителя. Возможно применение обоих методов, но в общем
случае для некоторых исполнений цилиндров и условий их
применения расчет по техническим данным изготовителя
предпочтительнее.
Развиваемое цилиндром усилие зависит от давления сжатого
воздуха, подаваемого в его полости, диаметра поршня и сил
трения в элементах уплотнения. Теоретически это усилие
рассчитывается по формуле:
Усилие на поршне
где
FТ -
теоретическое усилие на поршне (Н), А - полезная площадь
поршня (м2),
р - рабочее давление (Па).
На практике важно знать эффективную силу на штоке цилиндра.
При ее расчете принимается во внимание сопротивление силы
трения. При нормальных эксплуатационных условиях - давление
питания в диапазоне 400 ... 800 кПа (4 ... 8 бар) - сила
трения может приниматься в размере около 10% от
теоретической силы на поршне.
Для цилиндра одностороннего действия:
Для цилиндра двустороннего действия: -при прямом ходе
-при обратном ходе
FЭФФ -
эффективная сила на штоке поршня (Н), А - эффективная
площадь поршня (м2),
которая определяется по формуле:
А" - эффективная площадь поршня со стороны штока (м2),
которая определяется по формуле:
р - давление питания (Па), FTP -
сила трения (Н),
Fnp - сила действия возвратной пружины (Н), D - диаметр
цилиндра (м),
d - диаметр штока (м).
Рис. 3.17. Диаграмма зависимости диаметра поршня от давления
питания и силы на штоке поршня
Длина хода штока
Длина хода штока обычных пневмоцилиндров, как правило, не
превышает 2 м, а у бесштоковых цилиндров длина хода каретки
достигает 10м,
При значительном ходе штока возникающие в нем и его
направляющей втулке напряжения могут оказаться слишком
большими. Чтобы избежать опасности продольного изгиба штока,
следует для больших ходов выбирать и больший диаметр штока.
Расчет диаметра штока на продольный изгиб может
осуществляться с помощью диаграммы (рис. 3.18).
Рис .3.18. Диаграмма зависимости диаметра поршня от его хода
и нагрузки на штоке
Скорость поршня
Скорость движения поршня в пневматическом цилиндре зависит
от нагрузки, давления сжатого воздуха, подаваемого в
цилиндр, длины и эффективного сечения трубопроводов между
цилиндром и управляющим распределителем, а также от расхода
воздуха, поступающего от распределителя.
Кроме того, на скорость поршня влияет демпфирование в конце
хода.
Средняя скорость поршня стандартных цилиндров колеблется в
пределах 0,1 ... 1,5 м/с. В специальных цилиндрах (ударных)
она может достигать 10 м/с. Скорость поршня при
необходимости можно уменьшить с помощью пневмодросселей за
счет снижения расхода воздуха, вытекающего из полости
цилиндра, а увеличить - за счет применения клапанов быстрого
выхлопа.
Рис. 3.19. Средняя скорость ненагруженного поршня
Потребление воздуха
Для того, чтобы правильно выбрать систему подготовки сжатого
воздуха и определить стоимость получения энергии, важно
знать расход воздуха, потребляемого пневмосистемой. Величина
относительного расхода определяется через объемный расход
(л/мин), приведенный, приведенный к атмосферным условиям.
Потребление сжатого воздуха определяется по выбранным
значениям рабочего давления, диаметра поршня, хода поршня и
числа его ходов в минуту по формуле: Потребление воздуха =
Степень сжатия воздуха * Площадь поршня * Ход * Число ходов
в минуту, где
Рис. 3.20. Диаграмма расхода потребляемого воздуха
Для расчета расхода потребляемого воздуха можно также
воспользоваться диаграммой,
приведенной на рис. 3.20, совместно с формулами: для
цилиндра одностороннего действия -
для цилиндра двустороннего действия -
где
qn - потребляемый расход (л/мин), s - ход(см), п - число
ходов в минуту (мин-1),
qx - расход воздуха на единицу хода (л/см).
В этих формулах не принимается во внимание различие расходов
воздуха, потребляемого цилиндрами двустороннего действия при
прямом и обратном ходе штока. Также не учитывается расход
воздуха из-за его сжимаемости в объемах трубопроводов и в
распределителей.
Кроме того, на общий расход воздуха оказывает влияние
процесс наполнения вредного объема цилиндра, который может
составить до 20% расхода воздуха, потребляемого
исполнительным устройством. Вредным объемом цилиндра
является часть объема цилиндра в конечном положении поршня и
часть объема подводящего трубопровода, находящегося внутри
цилиндра.
Диаметр поршня, мм
Вредный объем штоковой полости, см3
Вредный объем поршневой полости, см3
12
1
0,5
16
1
1,2
25
5
6
35
10
13
50
16
19
70
27
31
100
80
88
140
128
150
200
425
448
250
2005
2337
Таблица 3.1. Вредный объем цилиндра
Пневмомоторы
Устройства, преобразующие энергию сжатого воздуха в
механическую энергию непрерывного вращательного движения,
называются пневматическими моторами. Пневмомотор с
неограниченным углом поворота вала в настоящее время стал
одним из широко используемых исполнительных устройств. В
зависимости от типа конструкции различают:
поршневые пневмомоторы,
пластинчатые пневмомоторы,
шестеренные пневмомоторы,
динамические моторы (турбины).
Рис. 3.21. Пневмомотор
Поршневые пневмомоторы
Моторы этого типа подразделяются на радиально- и аксиально-
поршневые. Выходной вал мотора приводится во вращение попеременно
срабатывающими под действием сжатого воздуха поршнями. Для получения
равномерного вращения выходного вала пневмомотора необходимо иметь
несколько поршней. Мощность пневмомотора зависит от входного
давления сжатого воздуха, числа поршней, длины их хода и скорости их
перемещения.
Принцип действия радиально- и аксиально-поршневых моторов одинаков,
только в первом случае возвратно-поступательное перемещение
радиально расположенных поршней передается на вал через штоки с
шарнирами на концах, а во втором случае аксиально расположенные
поршни передают движение на вал через наклонный диск. Обычно
давление подводится одновременно к двум или более (зависит от их
общего числа) поршням, что обеспечивает более плавное вращение вала.
Направление вращения вала мотора может быть как по часовой стрелке,
так и против. Максимальная скорость составляет около 5000 об/мин;
выходная мощность при нормальном уровне давления нахо- дится в
пределах 1,5...19кВт(2...25л.с).
Пластинчатые пневмомоторы
Благодаря своей простой конструкции и малому весу пластинчатые
пневмомоторы используются в ручных пневмоинструментах. Их принцип
работы похож на принцип работы пластинчатого компрессора.
Ротор такого мотора установлен с эксцентриситетом на подшипниках в
цилиндрической камере. В роторе выполнены щели, в которых
размещаются лопасти с возможностью перемещения в радиальном
направлении. При вращении ротора лопасти под действием центробежной
силы прижимаются к внутренней поверхности цилиндрической камеры, за
счет чего обеспечивается уплотнение рабочих объемов мотора друг
относительно друга. Скорость вращения ротора составляет 3000...8500
об/мин. Направление вращения также может быть как по, так и против
часовой стрелки, то есть они имеют возможность реверсирования.
Выходная мощность составляет 0,1 ... 17 кВт (0,14 ... 24 л.с).
Шестеренные пневмомоторы
В этих моторах крутящий момент на выходном валу создается за счет
подачи воздуха под давлением в камеру с двумя находящимися в
зацеплении зубчатыми колесами, одно из которых связано с выходным
валом. Моторы такого типа используются там, где требуется высокая
мощность (до 44 кВт
= 60 л.с). Если используются прямозубые цилиндрические или
геликоидальные зубчатые предачи, шестеренные моторы также могут быть
реверсивными.
Турбинные моторы
Турбинные моторы используются только там, где требуется небольшая
мощность. Скорость вращения их вала очень высокая. Например,
зубоврачебная бормашина, оснащенная турбиной, обеспечивает скорость
вращения 500 000 об/мин. Принцип работы турбинного мотора обратен
принципу работы центробежного компрессора.
непрерывная регулировка скорости и крутящего момента,
небольшие размеры и вес,
большой диапазон скоростей,
защищенность от перегрузки,
нечувствительность к загрязнениям, воде, высокой и низкой
температуре,
взрывобезопасность,
простота обслуживания,
реверсивность.
Индикаторы
Пневматические индикаторы позволяют визуально определить
операционное состояние пневмосистемы и служат для целей диагностики.
Ниже перечислены некоторые устройства визуальной информации:
счетчики циклов,
манометры с индикацией уровня давления,
таймеры с визуальной индикацией выдержки времени,
оптические индикаторы.
Оптические индикаторы
Каждый цвет оптического индикатора несет определенную информацию о
состоянии системы управления. Оптические индикаторы устанавливаются
на панели управления, они показывают
96
состояние и фактическую последовательность выполнения функций
системой управления. Цвета оптических индикаторов должны
соответствовать DIN VDE 0113.
Цвет
Значение
Пояснения
Красный
Стоп, Выключить
Состояние машины или установки требует немедленного
вмешатель- ства.
Любое значение, которое не может быть выражено красным,
желтым или зеленым цветами.
Белый или бесцветный
Несущественное значение
Не играет важной роли.
Может использоваться тогда, когда не могут применяться
красный, желтый или зеленый цвета.
Таблица 3.2. Оптические индикаторы
Глава 4 Распределители
Основные типы распределителей
Распределители - это устройства, предназначенные для пуска,
останова и изменения направления движения потока сжатого
воздуха. Условное обозначение распределителя дает информацию
о числе линий (каналов) для прохода воздуха, числе позиций
переключения и виде управления. Это изображение, однако, не
дает представление о конструкции распределителя, а указывает
только на его функциональные возможности.
За позицию покоя принимается
позиция переключения распределителя с самодействующим
возвратным устройством, например пружиной, которую занимают
подвижные части распределителя, если он не находится под
воздействием сигнала управления. Исходной позицией называется
позиция переключения, которую принимают подвижные части
распределителя после его монтажа на установке и включения
источников энергии (питания сжатым воздухом и (или)
электрическим током) и с которой начинается выполнение
предусмотренной программы (последовательности) переключений.
Конструкция распределителя оказывает существенное влияние на
такие его характеристики, как срок службы, время
переключения, усилие переключения, способ управления, виды
присоединения к трубопроводам и размеры.
По конструктивному исполнению различают распределители с
запорными элементами:
клапанного (седельного) типа:
шариковые,
тарельчатые (плоские);
золотникового типа:
с цилиндрическим золотником,
с плоским золотником,
с торцевым золотником.
Распределители клапанного (седельного)типа
В этих распределителях каналы прохода сжатого воздуха
открываются и закрываются посредством шариковых, тарельчатых,
дисковых или конических запорных элементов, которые
взаимодействуют с седлами соответствующей формы. Уплотнение по
площади контакта запорного элемента с седлом обычно достигается
за счет применения эластичных материалов в месте контакта. В
клапанных (седельных) распределителях почти нет деталей,
подверженных износу (отсутствуют пары трения),
97
поэтому они имеют большой срок службы. Кроме того, они также
нечувствительны к загрязнениям и могут работать в
неблагоприятных условиях. Однако для переключения таких
распределителей необходимо значительное усилие, чтобы преодолеть
действие возвратной пружины или возвратного давления.
Распределители золотникового типа
В этих распределителях отдельные каналы соединяются или
разъединяются посредством цилиндрических, плоских или торцевых
золотников.
2/2-распределители
2/2-распределитель имеет две линии подвода/отвода
воздуха и две позиции переключения. В основном он
используется как отсечной (запорный) распределитель, так
как реализует только функцию перекрытия или открытия
прохода воздуха через себя, не имея возможности в
закрытом положении отводить воздух в атмосферу (в
отличие от 3/2-распределителя).
3/2-распределители
С помощью 3/2-распределителя можно включать и выключать
поток воздуха. 3/2-распределитель имеет три линии
подвода/отвода воздуха и две позиции переключения.
Дополнительный, по сравнению с 2/2-распределителем,
выхлопной канал 3(R) позволяет отключать сигнал на
выходе распределителя, соединяя его с атмосферой. В
нормально закрытом распределителе в исходной позиции
шариковый клапан под воздействием пружины перекрывает
проток воздуха из линии питания 1(Р) к выходному каналу
2(A). Канал 2(A) соединяется через отверстие в толкателе
и канал 3(R) с атмосферой.
Рис. 4.1. 3/2-распределитель, нормально закрытый, с
шариковым запорным элементом
Под действием внешней силы толкатель нажимает на шарик
клапана, преодолевая силу возвратной пружины и
противодействующее давление сжатого воздуха.
В состоянии включения канал 2(A) отсекается от
выхлопного канала 3(R), сжимается возвратная пружина и
шарик отходит от седла, открывая проток воздуха от
канала питания 1(Р) к каналу 2(A), и на выходе
распределителя появляется пневматический сигнал. Если
устранить воздействие на толкатель, распределитель
вернется в исходное положение. В данном случае
распределитель имеет ручное или механическое управление.
Требуемое для переключения распределителя управляющее
усилие зависит от значения давления питания, силы
поджатия пружины и сил трения в распределителе. Это
усилие ограничивает размеры распределителя, поскольку с
ростом проходного сечения управляющее усилие также
возрастает. Конструкция распределителя со сферическим
клапанным затвором очень проста и компактна.
На схеме (рис.4.2) 3/2-распределитель 1.1 управляет
перемещением штока цилиндра одностороннего действия 1.0.
В исходном положении канал подвода питания 1(Р)
распределителя заблокирован, но при нажатии на кнопку
распределитель переключается и канал подвода питания
1(Р) соединяется с каналом 2(A), к которому подсоединена
полость цилиндра. В нее начинает поступать сжатый
воздух, заставляющий поршень перемещаться, сжимая
возвратную пружину, установленную в штоковой полости
цилиндра. Если кнопка отпускается, то под действием
пружины распределитель возвращается в исходную позицию,
при которой канал 2(A) соединяется через канал 3(R) с
атмо- сферой, выпуская воздух из поршневой полости
цилиндра. Поршень цилиндра под действием возвратной
пружины втягивается, занимая исходное положение.
Рис. 4.2. Принципиальная схема: управление цилиндром
одностороннего действия
Рис. 4.3. 3/2-распределитель, нормально закрытый, с
клапаном тарельчатого типа, в позиции "Выключено"
3/2-распределитель, представленный на рис. 4.3, выполнен
на базе тарельчатого (дискового) клапана. Это
обеспечивает простое и эффективное уплотнение между
запорным элементом и седлом. Время переключения
невелико, поскольку такой клапан при небольшом его
перемещении обеспечивает большое проходное сечение. Как
и распределитель со сферическим запорным элементом,
такой распределитель нечувствителен к загрязнениям и
имеет длительный срок службы. 3/2-распределители
используются в системах управления с цилиндрами
одностороннего действия или для выработки входных
сигналов управляющих распределителей.
Рис. 4.4. 3/2-распределитель, нормально закрытый, с
клапаном тарельчатого типа, в позиции "Включено"
У нормально открытого 3/2-распределителя открыт проход
сжатого воздуха из канала питания 1(Р) в канал 2(A). В
этом положении каналы 1(Р) и 2(A) соединены между собой
через канал в запорном элементе, тогда как последний,
удерживаемый пружиной на седле, блокирует выхлопной
канал 3(R). При воздействии на толкатель он сначала,
вступая в контакт с запорным элементом, блокирует канал
питания 1(Р), а затем, отрывая запорный элемент от седла
против силы действия пружины, открывает проход от канала
2(A) к выхлопному каналу 3(R). При снятии воздействия с
толкателя сначала более мощная пружина запорного
элемента без нарушения контакта его с толкателем сажает
его на седло, блокируя канал 3(R), а затем пружина
толкателя возвращает его висходное положение, открывая
проход от канала питания 1(Р) к каналу 2(A).
Управление 3/2-распределителями может быть ручным,
механическим или пневматическим. Вид управления зависит
от требований системы управления.
Рис. 4.5. 3/2-распределитель, нормально открытый, с
клапаном тарельчатого типа, в позиции "Выключено"
Рис. 4.6.3/2-распределитель, нормально открытый, с
клапаном тарельчатого типа, в позиции "Включено"
На представленной схеме используется нормально открытый
3/2-распределитель, который в исходном положении подает
сжатый воздух в полость цилиндра одностороннего действия
1.0. Поэтому шток цилиндра в исходном положении
выдвинут. При воздействии на толкатель распределителя
1.1 рабочий объем цилиндра через каналы 2(A) и 3(R)
соединяется с атмосферой. Шток цилиндра 1.0 под
действием возвратной пружины втягивается.
Рис. 4.7. Принципиальная схема: управление цилиндром
одностороннего действия
3/2-распределитель золотникового типа с двусторонним
ручным управлением
Конструкция распределителя очень проста и компактна.
Распределитель имеет две фиксированные позиции -
открытую и закрытую. При смещении вручную золотника,
имеющего вид втулки на трубопроводе, канал питания 1(Р)
соединяется с выходным каналом 2(A). При обратном
переключении канал 2(A) сообщается с атмосферой через
канал 3(R), сжатый воздух удаляется из системы. Такой
распределитель используется для подключения питания
пневмосистемы сжатым воздухом.
Рис. 4.8. 3/2-распределитель золотникового типа с ручным
управлением, нормально закрытый
3/2-распределитель с пневматическим управлением
Распределитель имеет управляющий поршенек и возвратную
пружину. В позиции покоя распределитель нормально
закрыт, так как канал питания 1(Р) блокируется дисковым
запорным элементом, а выходной канал 2(A) соединен
посредством канала 3(R) с атмосферой. Распределитель
переключается поступающим на его вход 12(Z) давлением
сжатого воздуха, прилагаемым к управляющему поршеньку.
При этом канал 1(Р) соединяется с каналом 2(A). После
снятия давления в управляющем канале 12(Z)
распределитель возвращается под действием возвратной
пружины в исходную позицию (позицию покоя). Клапан
разъединяет каналы 1(Р) и 2(A). Выходной канал 2(A)
соединяется через канал 3(R) с атмосферой.
3/2-распределитель с односторонним пневматическим
управлением и возвратной пружиной выполняется нормально
закрытым и нормально открытым.
Рис. 4.9. 3/2-распределитель, с пневматическим
управлением и возвратной пружиной, в позиции "Выключено"
Рис. 4.10. 3/2-распределитель, с пневматическим
управлением и возвратной пружиной, в позиции "Включено"
Рис. 4.11. Принципиальная схема: непрямое управление
цилиндром одностороннего действия
Распределитель с пневматическим управлением может
применяться в качестве входного элемента при непрямом
управлении цилиндром. Непрямой сигнал управления на
выдвижение штока цилиндра
1.0 (рис. 4.11) подается 3/2-распределителем с ручным
управлением 1.2 на управляющий распределитель 1.1, при
включении которого выдвигается шток цилиндра 1.0.
Конструкция рассматриваемого распределителя выполнена
таким образом, что для преобразования нормально
закрытого 3/2-распределителя в распределитель нормально
открытый необходимо лишь инверсировать (взаимно поменять
местами) каналы 1(Р) и 3(R), a управляющую головку с
каналом 12(Z) повернуть на 180°. Следует также присвоить
новое обозначение каналу управления: 10(Z).
Если нормально открытый распределитель установить в
рассмотренную выше систему непрямого управления, то в
исходной позиции шток поршня окажется выдвинутым. После
нажатия пневматической кнопки 1.2 шток цилиндра
втянется.
Рис. 4.12. Принципиальная схема: непрямое управление
цилиндром одностороннего действия
3/2-распределитель с непрямым управлением от рычага с
роликом
Распределители с предварительным каскадом усиления
позволяют уменьшить усилие управления. Распределители,
имеющие каскад непрямого управления, называют
распределителями с непрямым управлением, а элемент
управления, осуществляющий функцию предварительного
каскада усиления,
пилотным клапаном (или пилотным золотником). К
пилотному клапану (рис. 4.14) подводится давление
питания. Если нажать на рычаг с роликом, то
открывается пилотный клапан. Сжатый воздух
воздействует на мембрану, которая перемещает
тарельчатый запорный элемент главного клапана вниз.
При этом происходит процесс последовательного
переключения 3/2-распределителя: сначала прерывается
соединение канала 2(A) с каналом 3(R), а затем канал
1 (Р) соединяется с каналом 2(A).
Рис. 4.13. Элемент непрямого управления: слева
выключен, справа включен
Возврат распределителя в исходное положение
происходит после отпускания рычага с роликом.
Благодаря этому закрывается пилотный клапан. Воздух
из-под мембраны вытекает через каналы направляющей
буксы толкателя пилотного клапана. Управляющий
поршень главного клапана под действием возвратной
пружины занимает исходное положение.
Рис. 4.14. 3/2-распределитель с непрямым управлением
от рычага с роликом, нормально закрытый
Конструкция этого распределителя позволяет применять
его как в качестве нормально закрытого, так и в
качестве нормально открытого распределителя. Она
выполнена таким образом, что канал питания 1(Р) и
канал выхлопа 3(R) можно поменять местами, а
управляющая головка с каналом 12(Z) может быть
повернута на 180°.
Распределитель с управлением от ломающегося рычага с
роликом
Распределитель с управлением от ломающегося рычага
включается только в том случае, если переключающий
толкатель воздействует на ролик в одном определенном
направлении.
Распределитель устанавливается в качестве конечного
выключателя для опроса положения втяги- вающегося и
выдвигающегося штока цилиндра. При этом необходимо
обратить внимание на то, что клапан при монтаже
должен быть сориентирован таким образом, чтобы он
включался только при желаемом направлении движения.
Конструкция этого распределителя также позволяет
применять его как в качестве нормально закрытого,
так и в качестве нормально открытого распределителя.
Она выполнена таким образом, что канал питания 1(Р)
и канал выхлопа 3(R) можно поменять местами, а
управляющая головка с каналом 12(Z) может быть
повернута на 180° .
Рис. 4.15. 3/2-распределитель с непрямым управлением
от рычага с роликом, нормально открытый
4/2-распределители
4/2-распределитель имеет 4 канала подвода/отвода воздуха
и 2 позиции переключения.
Рис. 4.16. 4/2-распределитель с тарельчатым запорным
элементом, позиция "Выключено"
4/2-распределитель выполняет такие же функции, как и
комбинация двух 3/2-распределителей, один из которых
должен быть нормально открытым, а другой - нормально
закрытым.
Рис. 4.17. 4/2-распределитель с тарельчатым запорным
элементом, позиция "Включено"
При одновременном воздействии на оба толкателя сначала
перекрываются проходы между каналами 1(Р) и 2(B) и между
каналами 4(A) и 3(R). По мере дальнейшего перемещения
толкателей уже вместе с клапанными запорными элементами
против силы действия пружин открываются проходы между
каналами 1(Р) и 4(A) и между каналами 2(B) и 3(R).
После снятия управляющего воздействия на толкатели
распределитель возвращается в исходное положение под
действием возвратной пружины. 4/2-распределители
используются для управления цилиндрами двустороннего
действия.
Имеются также 4/2-распределители с односторонним
пневматическим управлением и возвратной пружиной, с
двусторонним пневматическим управлением, с непрямым
управлением от рычага с роликом. В качестве органа
распределения в них могут использоваться плоские или
цилиндрические золотники. Как правило,
4/2-распределители выполняют такие же функции, как и
5/2-распределители.
Рис. 4.18. Принципиальная схема: прямое управление
цилиндром двустороннего действия
В распределителях с плоским золотником коммутация
каналов подвода/отвода воздуха осуществляется на плоской
поверхности с помощью скользящего по ней плоского
запорного элемента. Запорный элемент приводится в
движение управляющим поршнем, жестко соединенным с ним.
Рис. 4.19. 4/2-распределитель с двусторонним
пневматическим управлением и плоским золотником
Рассматриваемый распределитель имеет прямое двустороннее
пневматическое управление. При снятии давления
управления управляющий поршень вместе с запорным
элементом остается в занятой им позиции до тех пор, пока
новый сигнал управления не поступит с противоположного
канала управления.
4/3-распределители
4/3-распределитель имеет 4 канала подвода/отвода воздуха
и 3 позиции переключения. Примером такого распределителя
может служить распределитель с плоским краном,
оснащенным ручным или ножным (педальным) управлением.
При повороте плоского крана с выполненными в нем
проточками происходит соединение входных и выходных
каналов между собой.
Рис. 4.20. 4/3-распределитель с ручным управлением, в
нейтральном положении закрыт
Рис. 4.21. 4/3-распределитель с ручным управлением,
поперечное сечение
На конструктивной схеме (рис. 4.21) показан
4/3-распределитель, у которого в средней позиции все
каналы перекрыты и не соединяются между собой. Это
позволяет останавливать шток цилиндра двустороннего
действия в любом положении по ходу его движения, хотя
такое промежуточное положение нельзя обеспечить с
достаточной точностью. Из-за сжимаемости воздуха при
изменении нагрузки на шток поршень каждый раз будет
останавливаться в разных положениях.
Рис. 4.22. Принципиальная схема: прямое управление
цилиндром двустороннего действия
5/2-распределители
5/2-распределитель имеет 5 каналов подвода/отвода
воздуха и 2 позиции переключения.
Он используется в основном как управляющий элемент
пневмосистем управления с цилиндрами двустороннего
действия. Примером такого распределителя может служить
распределитель с цилиндрическим золотником в качестве
подвижного запорного элемента. Коммутация и перекрытие
соответствующих каналов происходит при осевом смещении
золотника. В отличие от распределителей с шариковыми и
тарельчатыми запорными элементами, управляющее усилие в
них, действующее на торец золотника со стороны сжатого
воздуха или возвратной пружины, невелико из-
за небольших сил сопротивления. Для управления
распределителем с цилиндрическим золотником могут
применяться все виды управления - ручное, механическое,
пневматическое или электрическое. Для возвращения
распределителя в исходное положение используются те же
виды управления.
Рис. 4.23. 5/2-распределитель с двусторонним
пневматическим управлением
Управляющее перемещение у золотниковых распределителей
больше, чем у клапанных. Кроме того, в цилиндрических
золотниках осложнено решение задачи уплотнения. Как
говорят, уплотнение типа "металл по металлу" требует
точной подгонки цилиндрического золотника к отверстию в
корпусе или гильзе.
Зазор между золотником и корпусом должен быть в
пневматическом распределителе, по возможности, меньше,
так как иначе возможны слишком большие утечки.
Фактическое значение радиального зазора находится в
диапазоне 0,002...0,004 мм. Чтобы как-то снизить
стоимость производства золотниковых пар, допустимый
зазор несколько увеличивают, а золотник или корпус
снабжают уплотнительными кольцами из упругого материала.
Уплотнения в виде круглых колец или чашечных манжет
могут устанавливаться на золотник, а круглые кольца ■в
корпус. Во избежание повреждения уплотнений каналы
распределителя располагают по окружности золотниковой
втулки (корпуса).
Рис. 4.25. Принципиальная схема: непрямое управление
цилиндром двустороннего действия 5/2-распределители
обычно устанавливаются в систему вместо
4/2-распределителей. 5/2- распределитель позволяет
удалять воздух из рабочих полостей цилиндра по различным
каналам выхлопа при выдвижении и втягивании штока.
Функции управления 4/2- и 5/2-распределителей, в
основном, одинаковые.
Распределитель с двусторонним пневматическим управлением
золотникового типа может быть оснащен уплотняющим
элементом в виде тарельчатого седельного клапана,
имеющего относительно малый ход переключения.
Тарельчатые седельные клапаны, размещенные на золотнике,
соединяют канал 1(Р) с каналом 2(B) или 4(A). А клапаны,
размещенные на поршеньках, открывают или закрывают
соответственно каналы выхлопа. Кроме того,
рассматриваемый распределитель с обеих сторон имеет
ручное управление.
Рис. 4.25. 5/2-распределитель с двусторонним
пневматическим управлением и вспомогательным ручным
управлением, с запорным элементом тарельчатого типа;
открыт проток воздуха от канала 1 к каналу 2
5/2-распределитель с двусторонним пневматическим
управлением обладает свойством памяти. Распределитель
управляется путем попеременной подачи пневматического
сигнала в каналы управления 14(Z) и 12(Y). Позиция
переключения сохраняется и после снятия сигнала
управления до тех пор, пока не будет подан сигнал
управления с противоположной стороны распределителя.
Рис. 4.26. 5/2-распределитель с двусторонним
пневматическим управлением и вспомогательным ручным
управлением, с запорным элементом тарельчатого типа;
открыт проток воздуха от канала 1 к каналу 4
5/3-распределители
5/3-распределитель имеет пять рабочих каналов
подвода/отвода воздуха и три позиции переключения. С
помощью таких распределителей можно останавливать
поршень цилиндра двустороннего действия в любом месте по
ходу штока. При этом в нейтральной позиции распре-
делителя поршень цилиндра останавливается под действием
кратковременного повышения давления, а движение поршня
начинается со сброса давления в соответствующей полости
цилиндра. Если сигнал управления отсутствует в обоих
управляющих каналах, то золотник удерживается в
нейтральной позиции с помощью центрирующих пружин.
Рис. 4.27. 5/3-распределитель с двусторонним
пневматическим управлением; в нейтральном положении все
каналы перекрыты
Расходные характеристики распределителя
При выборе распределителя пользователь прежде всего
должен обратить внимание на потери давления и расход
воздуха, пропускаемый пневматическим распределителем.
Выбор распределителя определяется:
объемом и скоростью поршня цилиндра,
требуемой частотой переключений,
допустимыми потерями давления.
Пневмораспределители характеризуются их номинальным расходом. При
расчете величины расхода принимаются во внимание следующие
переменные:
p1 - давление на входе распределителя (кПа или бар), р2 - давление
на выходе распределителя (кПа или бар),
∆р- перепад давлений (p1 - р2) (кПа или бар), T1 - температура (К),
qn - номинальный расход (л/мин).
Распределитель испытывается путем прогона через него воздуха в
определенных направлениях. При этом измеряются входное и выходное
давление воздуха. По измерениям массы прошедшего через
распределитель воздуха определяют номинальный расход.
Сведения о номинальном расходе распределителей можно найти также в
каталогах изготовителей.
Надежность работы распределителей
Надежность управления системой в определенной мере зависит от
способа крепления концевых выключателей. Концевые выключатели должны
конструироваться таким образом, чтобы обеспечивались их простая
установка и присоединение. Это важно для точного определения
положения штока цилиндра.
Установка распределителей
Кроме правильного выбора типа распределителей, на надежность работы
системы влияет и их монтаж, от которого зависят характеристики
переключения, безаварийная работа и возможность доступа для ремонта
и обслуживания. Это относится как к распределителям, подводящим
питание к цилиндрам, так и к распределителям, выполняющим
логико-вычислительные или информационные функции.
Облегчению работ по обслуживанию и ремонту способствуют:
нумерация элементов системы,
установка оптических индикаторов,
наличие полного комплекта документации.
Монтаж распределителей с управлением от рычага с роликом
Обычно распределители с ручным управлением, используемые для ввода
сигналов, устанавливаются на пульте или панели управления. Поэтому
удобно использовать сменные управляющие головки на корпусе бaзoвой
конструкции распределителя. Для выполнения широкого разнообразия
вариантов ввода сигналов имеются самые различные конструкции
управляющих головок.
Распределители в качестве управляющих элементов (усилителей
мощности) определяют рабочие процессы пневматических исполнительных
устройств. Основным требованием к управляющим распределителям,
которые используются для управления исполнительными устройствами,
является обеспечение быстрого реверса последних при подаче нового
управляющего сигнала. Поэтому такие распределители должны
располагаться, по возможности, вблизи исполнительных устройств,
чтобы сократить длину трубопроводов, а следовательно, и время
переключения самих устройств. В идеальном случае распределитель
должен устанавливаться непосредственно на исполнительном устройстве,
перемещениями которого он управляет, в результате чего сокращаются
число промежуточных соединений и длина трубопроводов, а также
значительно снижается время монтажа системы.
Обратные клапаны - это устройства, позволяющие свободно протекать
воздуху в одном направлении и закрывающие проход его в
противоположном направлении. Конструкция обратного клапана такова,
что давление за запорным элементом клапана действует в сторону,
противоположную его рабочему перемещению, что увеличивает
герметичность пары "запорный элемент-седло"*.
* В Германии, Австрии и ряде других стран клапаны такого типа
называют запорными клапанами. К этому типу клапанов относят (по
терминологии, принятой в России) обратные клапаны, логические
клапаны, клапаны быстрого выхлопа и запорные краны. В настоящем
переводе, ориентированном на российского читателя и читателей стран
СНГ, принята рос- сийская терминология. Поэтому в этом разделе
учебника базовый элемент клапанов данного типа будет называться
собственно обратным клапаном
Собственно обратные клапаны
Собственно обратные клапаны полностью перекрывают проток воздуха в
одном из направлений. В противоположном направлении воздух протекает
с минимальной потерей давления, то есть сопротивление клапана в этом
направлении минимально. В качестве подвижного запорного элемента
могут применяться шарики, мембраны, конические или плоские
(тарельчатые, дисковые) запорные элементы.
Рис. 5.1. Обратный клапан
Логико-вычислительные элементы
Элементы, обладающие свойствами обратного клапана, могут выполнять
логические операции над двумя входными сигналами, формируя выходной
сигнал управления. В качестве элементов, осуществляющих логические
операции, рассмотрим два типа клапанов, имеющих один выходной и два
входных канала. Клапан двух давлений, реализующий логическую функцию
"И", вырабатывает на выходе сигнал только при наличии обоих входных
сигналов, а перекидной клапан, реализующий логическую функцию "ИЛИ",
для получения выходного сигнала требует присутствия на входе хотя бы
одного из двух сигналов. По функциональному назначению эти клапаны
относятся к логико- вычислительным элементам системы управления.
Клапан двух давлений: логическая "И"-функция
Этот клапан имеет два входных и один выходной каналы. Сжатый воздух
проходит через клапан только в случае подачи сигнала на оба его
входа. При подаче одного входного сигнала проход воздуха через
клапан блокируется. Если сигналы появляются на обоих входах X и Y
клапана, то последний из поданных сигналов проходит на выход. Если
давление входных сигналов различно, то большее по значению давление
прижимает подвижный элемент к упору, а на выход проходит сигнал с
меньшим давлением. Клапан двух давлений используется главным образом
для блокировки сигналов, реализации условий безопасности,
контрольных функций и логических операций.
Рис. 5.2. Клапан двух давлений: логическая "И"-функция
Рис. 5.3. Принципиальная схема: клапан двух давлений
Принципиальная схема пневматической цепи с клапаном "И" эквивалентна
схеме с последовательным подключением двух информационных устройств
(распределителей с управлением от кнопок), то есть -одно за другим
(рис.5.4). Пневматический сигнал проходит к управляющему
распределителю только при одновременном включении обоих
информационных элементов 1.2 и 1.4.
Недостатком этого варианта схемы является то, что на практике часто
между двумя клапанами имеется длинный участок трубопровода,
оказывающий сопротивление течению воздуха. Кроме того, сигнал
клапана 1.4 не может быть использован в других логических операциях,
так как он появляется только при включенном клапане 1.2.
Перекидной клапан: логическая "ИЛИ"-функция
Этот элемент имеет также два входа, X и Y, и один выход А. Если
сжатый воздух подается на вход X, то подвижный элемент клапана
прикрывает вход Y, позволяя воздуху проходить на выход А. Если
воздух следует на выход А от входа Y, то запирается вход X. При
обратном течении сжатого воздуха, то есть когда воздух из полости
цилиндра или от распределителя выпускается в атмосферу, подвижный
элемент остается в положении последнего переключения и удерживается
в нем давлени- ем протекающего через клапан воздуха. Этот клапан
также называют клапаном "ИЛИ". Если необходимо управлять цилиндром
или управляющим распределителем по двум или более каналам
управления, то следует установить один или несколько перекидных
клапанов. В представленном при- мере перемещением цилиндра
можно управлять с помощью любой из двух пневмокнопок, расположенных
либо рядом с ним, либо на большом расстоянии от него. Если не
устанавливать в схему перекидной клапан, то, например, при нажатии
на кнопку 1.2 сжатый воздух главным образом будет поступать не в
канал 14(Z) распределителя 1.1, а в канал сброса 3(R) клапана 1.4.
Рис. 5.5. Перекидной клапан: "ИЛИ"- функция
Рис. 5.6. Принципиальная схема: управление цилиндром от двух входных
элементов
Для реализации "ИЛИ"- функции на три или большее число входов
клапаны "ИЛИ" могут подключаться последовательно, как показано на
рис.5.7. Тогда при нажатии на любую из трех пневмокнопок шток
цилиндра 1.0 выдвигается.
Рис. 5.7. Принципиальная схема: управление цилиндром от трех входных
элементов
Клапан быстрого выхлопа
Клапан быстрого выхлопа используется для увеличения скорости
перемещения поршня цилиндра при прямом или обратном ходе. Это
сокращает время обратного хода цилиндра, что особенно важно для
цилиндров одностороннего действия. За счет снижения сопротивления
пнев-молинии, в которой установлен клапан быстрого выхлопа, поршень
цилиндра может двигаться практически с максимальной скоростью. При
этом воздух сбрасывается в атмосферу через относительно большое
выхлопное отверстие. Клапан имеет поочередно перекрываемые канал
давления 1(Р) и атмосферный канал 3(R), а также выходной канал 2(A).
Рис. 5.8.
Клапан быстрого выхлопа, воздух протекает от 1(Р) к 2(A)
Если давление подается на вход 1(Р), то подвижный запорный элемент
закрывает выхлопной канал 3(R). Сжатый воздух протекает от 1(Р) к
2(A). Если давление в канале 1(Р) снято, то воздух, поступающий из
канала 2(A), перемещает передвижной запорный элемент в сторону
канала 1(Р) и закрывает его. Удаляемый воздух может по кратчайшему
пути свободно выходить в атмосферу.
Линия сброса воздуха в атмосферу не должна иметь длинных или узких
каналов. Целесообразно клапан быстрого выхлопа устанавливать в
непосредственной близости от цилиндра.
Рис. 5.9. Клапан быстрого выхлопа, воздух протекает от 2(A) к 3(R)
Запорным краном называется устройство, которое непрерывно открывает
или закрывает проток воздуха в обоих направлениях. В качестве
запорных кранов широко используются вентили с шаровыми и дисковыми
запорными элементами.
Рис. 5.11. Запорный кран
Регуляторы расхода
Регуляторы расхода предназначены для управления расходом
сжатого воздуха. К регуляторам расхода в пневмоавтоматике
относятся дроссели.
Дроссели
Дроссель дозирует расход сжатого воздуха в обоих
направлениях течения потока. Дроссель, как правило, является
регулируемым. Он применяется для управления скоростью
движения штоков цилиндров. При этом следует обратить
внимание на то, что дроссель не должен полностью
закрываться.
Рис. 5.12. Дроссель
В зависимости от конструктивного исполнения существует два
типа дросселей:
игольчатые (длина канала дросселя больше, чем его
диаметр),
дроссельная шайба (длина канала дросселя меньше, чем его
диаметр).
Дроссель с обратным клапаном
Дроссель с обратным клапаном осуществляет дросселирование
воздуха только в одном направлении. Обратный клапан
закрывает проток воздуха в этом направлении и воздух может
протекать лишь через регулируемое поперечное сечение
дросселя. В обратном направлении воздух имеет свободный
проход через открывающийся обратный клапан. Дроссели с
обратным клапаном применяются для регулирования скорости
поршней пневматических цилиндров. Они должны устанавливаться
в непосредственной близости от цилиндров.
Рис. 5.13. Дроссель с обратным клапаном
Дросселирование в напорной линии
Различают два вида дросселирования при управлении
цилиндрами:
дросселирование в напорной линии,
дросселирование в линии выхлопа.
При дросселировании в напорной линии дроссель с обратным клапаном
устанавливается таким образом, что в цилиндр попадает
дросселированный воздух. Удаление воздуха из цилиндра осуществляется
свободно через обратный клапан, находящийся в линии выхлопа. При
этом виде дросселирования даже при малых изменениях нагрузки на
штоке, например при срабатывании концевого выключателя, возникают
значительные изменения скорости перемещения поршня.
Снижение нагрузки в подвижных частях цилиндра (например, нагрузки от
возвратной пружины в цилиндре одностороннего действия) вызывает
ускорение поршня цилиндра. Поэтому дросселирование в напорной линии
применяется при управлении цилиндрами одностороннего дей- ствия и
цилиндрами малых объемов.
Рис. 5.14. Дросселирование в напорной линии
Дросселирование в линии выхлопа
При таком способе регулирования скорости движения поршня воздух
свободно проходит в полость цилиндра через обратные клапаны, а
вытекает из полости через дроссели, создающие сопротивление
протекающему воздуху. В данном случае поршень как бы находится между
двумя пневматическими амортизаторами. Первый такой "амортизатор"
формируется за счет сжатого воздуха, втекающего в одну из полостей
под давлением, а второй - за счет ограничения расхода воздуха,
вытекающего из другой полости в атмосферу. Этот способ
дросселирования оказывается более предпочтительным, т.к. скорость
поршня менее восприимчива к изменениям нагрузки по ходу движения, и
поэтому он используется при управлении цилиндрами двустороннего
действия. Для малых цилиндров из-за незначительного расхода воздуха
применяется дросселирование и в напорной линии, и в линии выхлопа.
Рис. 5.15. Дросселирование в линии выхлопа
Механически регулируемые дроссели с обратным клапаном
Применяя механически регулируемые дроссели с обратным клапаном,
можно изменять скорость поршня цилиндра по ходу его движения.
Регулируемым винтом настраивается основная скорость, а с помощью
кулачка, который воздействует на роликовый рычаг механически
регулируемого дросселя с обратным клапаном, изменяется поперечное
сечение дросселя по ходу штока.
Рис. 5.16. Механически регулируемый дроссель с обратным клапаном
Клапаны давления
Клапаны давления - это пневматические элементы,
предназначенные для поддержания давления. Различаются
следующие три типа клапанов давления:
регуляторы давления (или редукционные клапаны),
предохранительные клапаны,
клапаны последовательности (или реле давления). Регуляторы давления
Регуляторы давления подробно описаны в разделе В 2.6 "Оборудование
для подготовки воздуха". Задачей этих устройств является поддержание
постоянного давления на выходе, несмотря на коле- бания давления на
входе. При этом входное давление всегда должно быть больше
требуемого выходного.
Рис. 5.17. Регулятор давления
Предохранительные клапаны
Эти клапаны используются главным образом как устройства
безопасности, защищающие пневмосистему от чрезмерного повышения
давления. При достижении заданного максимального уровня давления на
входе клапана он открывается и сбрасывает излишки сжатого воздуха в
атмосферу. Клапан остается открытым до тех пор, пока давление не
упадет до установленного значения, после чего он под действием
пружины закрывается.
Клапаны последовательности
Этот клапан действует по тому же принципу, что и предохранительный
клапан, то есть при достижении на входе заданного значения давления,
которое определяется настройкой пружины, клапан открывается.
Воздух проходит через клапан от канала 1(Р) к выходу 2(A), который
открывается только после достижения заданного значения давления в
канале управления 12(Z). Давление входного сигнала, воздействуя
через мембрану, открывает пилотный клапан, который открывает проход
воздуху из линии питания к основной мембране, связанной с главным
клапаном. При перемещении главного клапана происходит соединение
линии питания 1(Р) с выходом 2(A).
Клапан последовательности устанавливается в пневматической системе,
в которой необходимо управление по давлению, т.е. сигнал на
выполнение следующего шага поступает только после того, как давление
в определенном месте системы достигает заданного значения.
Рассмотренные выше пневматические элементы могут объединяться в
различные блоки, свойства и конструктивные особенности которых
определяются применяемыми клапанами. Такие блоки называют
комбинированными клапанами. Их условные графические обозначения
представляют собой также комбинации обозначений входящих в них
элементов, соединенных друг с другом соответствующим образом. К
комбинированным клапанам относятся:
пневмоблоки управления: генерация сигналов для реализации
реверсивных и циклических движений цилиндров двустороннего действия,
5/4-распределители: устройство управления цилиндром двустороннего
действия,
8-линейные распределители с пневмоуправлением: управление тактовым
устройством,
тактовые генераторы: мультивибраторы для управления быстрым
движением цилиндров,
вакуумные головки с выбрасывателем: для захвата и отпускания
деталей,
тактовые цепочки: для реализации задач управления,
командные модули с памятью: для пуска при определенных входных
условиях.
Клапан выдержки времени состоит из 3/2-распределителя, дросселя с
обратным клапаном и
небольшой пневмоемкости. 3/2-распределитель может быть нормально
открытым или нормально закрытым. Обычно выпускаются клапаны выдержки
времени в обоих вариантах исполнения с диапазоном выдержки времени
0...30 секунд.
Рис. 5.20. Клапан выдержки времени, нормально закрытый
Этот диапазон может быть значительно расширен при подключении
дополнительных пневмоемкостей. Точность выдержки времени зависит от
степени чистоты воздуха и постоянства давления.
Принцип действия клапана выдержки времени
Принцип действия клапана выдержки времени рассматривается на примере
клапана с нормально закрытым 3/2-распределителем. Сжатый воздух
подводится к клапану по каналу 1(Р).
Пневматический сигнал управления подается на вход 12(Z) и через
регулируемый дроссель начинает заполнять емкость. Настройка дросселя
влияет на величину расхода воздуха, а значит, и на время, за которое
в емкости повысится давление. После достижения в емкости заданного
значения давления запорный орган 3/2-распределителя перемещается
вниз. При этом блокируется проход от выхода 2(A) к выхлопному
отверстию 3(R), a затем открывается проход от канала питания 1(Р) к
выходу 2(A). Время, необходимое для наполнения пневмоемкости сжатым
воздухом до заданного значения давления, и является временем
настройки данного устройства.
Чтобы переключить клапан выдержки времени в исходное положение,
необходимо снять сигнал со входа 12(Z). Воздух из емкости через
обратный клапан быстро вытечет в атмосферу, и 3/2- распределитель
под действием пружины вернется в исходное положение, блокируя канал
питания 1 (Р) и соединяя выход 2(A) с выхлопом 3(R).
Рис. 5.21. Клапан выдержки времени, нормально открытый
В нормально открытом клапане выдержки времени в исходном положении
выход 2(A) 3/2- распределителя соединен с питанием 1(Р). При подаче
сигнала на вход 10(Z) выход 2(A) через заданное время соединяется с
атмосферой, а канал питания 1(Р) запирается. В результате выходной
сигнал будет отключен через установленное время.
Время выдержки соответствует моменту достижения определенного уровня
давления в пневмоемкости.
В изучаемой принципиальной схеме используются нормально открытый 1.4
и нормально закрытый
1.5 клапаны выдержки времени. При нажатии на кнопку 1.2 сигнал
проходит через клапан 1.4 и, переключая распределитель 1.1,
заставляет шток цилиндра выдвигаться. Клапан имеет настройку времени
0,5 секунды. Этого достаточно, чтобы стартовый сигнал поступил на
вход 14(Z) распределителя 1.1. Но спустя 0,5 секунды клапан выдержки
времени 1.4, на вход 10(Z) которого также поступает стартовый сигнал
от кнопки 1.2, выключается и снимает сигнал со входа 14(Z)
распределителя 1.1. Однако распределитель 1.1 остается в положении,
соответствующем выдвижению штока цилиндра 1.0. В крайнем выдвинутом
положении шток цилиндра 1.0 нажимает на концевой выключатель 1.3,
который посылает сигнал на вход 12(Z) нормально закрытого клапана
выдержки времени 1.5. Через установленное время, определяемое
настройкой дросселя в клапане 1.5, на выходе 2(A) клапана 1.5
появляется сигнал. Этот сигнал поступает на вход 12(Y)
распределителя 1.1, который переключается в исходное положение,
поскольку на его противоположном входе 14(Z) сигнала уже нет. Шток
цилиндра втягивается. Новый цикл можно будет начинать, если кнопка
1.2 отпущена. После отпускания кнопки сигнал на входе 10(Z) клапана
выдержки времени 1.4 пропадает и клапан 1.4 возвращается в исходную
позицию, подготовив линию для подачи нового сигнала на вход 14(Z)
распределителя 1.1.
Рис. 5.22. Принципиальная схема: клапан выдержки времени
На рис. 5.23 представлены графики переключения клапанов выдержки
времени.
Глава 6 Системы
Выбор и сравнение источников энергии систем управления
При выборе источника энергии для питания управляющей и
исполнительной частей системы управления учитываются:
требования к исполнительным и выходным устройствам,
метод управления,
наличие необходимых для реализации проекта человеческих и
производственных ресурсов,
совместимость проектируемой системы с другими системами, связанными
с ней.
В первую очередь должны быть рассмотрены все преимущества и
недостатки того или иного вида энергии, который планируется
применить в исполнительной и управляющей частях системы. Затем
осуществляется выбор решения.
Критерии
Пневмоавтоматика
Гидроавтоматика
Электроавтоматика
Сила линейная
Сила ограничена низким давлением питания и диаметром
поршня; при нагрузке торможения энергия не потребляется.
Большие силы благодаря большому давлению.
Малые силы; низкий КПД; отсутствие защиты от перегрузок;
высокое потребление энергии в режиме холостого хода.
Сила вращательная
Полный вращающий момент в режиме торможения без
потребления энергии.
Полный вращаю щий момент в ре жиме торможения, однако
некоторое потребление энергии.
Низкий вращающий момент в режиме тор можения (при полной
остановке).
Движение линейное
Простота изготовления; высокие ускорения; высокая
скорость.
Простота изготовления; хорошая регулируемость.
Сложно и дорого, так как требуются преобразователи рода
движения; при малых ходах необходимы линейные магниты, а
при малых силах - линейные моторы.
Движение вращательное или поворотное
Пневмомоторы с очень высоким числом оборотов; высокая
стоимость изготовления; низкий КПД; поворотное движение
путем преобразования с помощью зубчатой рейки и
шестерни.
Гидромоторы и поворотные цилиндры с числом оборотов
ниже, чем в пневмоавтоматике; хороший КПД.
Лучший КПД для приводов вращательного действия,
ограниченное число оборотов.
Таблица 6.1. Источники энергии исполнительной части системы
Простая регулируемость силы путем изменения давления и
скорости – расхода газа; то же самое в области низких
скоростей.
Очень хорошая регулируемость силы и скорости; а также
высокая чувствительность в области малых скоростей.
Иногда возможно при значительных издержках.
Способность
к аккумулирова- нию и транспор- тировке энергии
Возможно для любого количества воздуха; легко
транспортируется по трубам (до 1000 м) и в емкостях.
Аккумулирование возможно с использованием газовой среды
или пружины; транспортируется по трубопроводам (до 100
м).
Аккумулирование затруднено, но возможно с применением
аккумуляторов и батарей; транспортируется просто на
большие расстояния.
Чувствитель- ность к влиянию окружающей среды
Нечувствительность к колебаниям температуры;
взрывобезопасность; опасность замерзания водяных паров
при высокой влажности воздуха, высокой скорости движения
и низкой температуре окружающей среды.
Чувствительность к колебаниям температуры; источник
загрязнения и пожаро- опасности при утечках.
Нечувствительность к изменениям температуры; в опасных
условиях необходимо применение оборудования в пожаро-
и взрывобезопасном исполнении.
Стоимость энергии
Высокая по сравнению с электроавтоматикой; 1 м3сжатого
воздуха с давлением 600 кПа (6 бар) стоит от 0,03 до
0,05 DM в зависимости от типа установки и степени
использования воздуха.
Высокая по сравнению с электроавтоматикой.
Наименьшая стоимость энергии.
Другие свойства
Нечувствительность к перегрузкам; недопустимый уровень
шума выхлопа, поэтому необходима установка демпфера.
Нечувствительность
к перегрузкам; повышенный шум насосов при высоком
давлении.
Чувствительность к перегрузкам; нечувствительность
к перегрузкам достигается только за счет больших затрат;
шум при переключении контакторов и линейных магнитов.
Таблица 6.1. Источники энергии исполнительной части системы
(продолжение)
Критерии
Электро- автоматика
Электроника
Пневмоавтоматика нормального давления
Пневмоавтоматика низкого
давления
Безопасность работы элементов
Нечувствительность
к влиянию окружающей среды (пыль, влажность и т.д.)
Очень чувствительна к влиянию окружающей среды (пыль,
влажность, электрические помехи, удары и вибрации);
высокая долговечность
Высокая нечув- Ствительность к влиянию окружающей среды;
высокая долговечность
при чистом воздухе
Высокая нечувст- Вительность к влиянию окружающей среды;
нечувстви- тельность к степени чистоты воздуха; высокая
долговечность
Быстродействие элементов
> 10мс
<< 1 мс
> 5 мс
> 1 мс
Скорость передачи сигнала
Скорость света
Скорость света
10...40 м/с
100...200 м/с
Дальность передачи сигнала
Практически неограничена
Практически неограничена
Ограничена скоростью передачи сигнала
Ограничена ско- ростью передачи сигнала
Габариты
Небольшие
Очень небольшие
Небольшие
Небольшие
Способы обработки сигнала
Дискретный
Дискретный, аналоговый
Дискретный
Дискретный, аналоговый
Таблица 6.2. Источники энергии управляющей части системы
Виды управления
Системы управления можно классифицировать по различным
признакам. Ниже представлены виды управления по DIN 19226. В
зависимости от постановки задачи может быть выбран один из
трех видов управления (рис.6.1). Если предполагается
применение программного управления, то имеется возможность
выбора одного из трех его подвидов.
Рис. 6.1. Виды управления по DIN 19226
Виды управления по DIN 19226 Следящее управление.
Такое управление, при котором между входной (задающей) и
выходной величинами устанавливается однозначная взаимосвязь,
а внешние возмущающие переменные не должны вызывать
недопустимых отклонений. Следящая система не имеет свойств
памяти.
Управление с запоминанием.
При таком управлении после снятия или нового введения
задающей величины, в особенности после отработки
рассогласования, выходная величина сохраняет (запоминает)
достигнутое значение. Для того, чтобы выходную величину
вновь привести к начальному уровню, необходимо ввести
входной сигнал противоположного знака.
Программное управление.
Известно три подвида программного управления.
Управление по перемещению.
При управлении по перемещению сигнал управления подается от программного
устройства, выходные величины которого зависят от перемещения или
положения подвижных частей управляемой установки.
Последовательное управление.
В такой системе программа последовательного выполнения действий хранится
в генераторе программы, который осуществляет ее пошаговое выполнение в
соответствии с состоянием управляемой системы. Эта программа может или
непрерывно вводиться или же считываться с перфокарт, магнитных лент или
других элементов хранения информации.
Управление по времени.
При управлении по времени задающие величины поступают от
программного устройства, оснащенного генератором времени. Таким
образом, характерным признаком системы управления по времени
является генерация задаваемых программным устройством управляющих
воздействий во времени. В качестве генератора программы может
использоваться:
кулачковый вал,
копир,
перфокарта,
перфолента,
электронные контроллеры.
В следующем разделе представлены выдержки из предварительного
стандарта DIN 19237 (издание 1980 года). Во введении к
предварительному стандарту DIN 19237 имеются ссылки на еще
действующий стандарт DIN 19226. Однако сравнение обоих стандартов
указывает на их разногласия. Желательно, чтобы читатель сам провел
сравнение этих документов.
Как уже отмечалось выше, системы управления классифицируют по
различным признакам. Так в DIN 19237 также представлено несколько
видов управления, которые отличаются по форме представления
информации и по видам ее обработки.
Аналоговое управление.
При этом виде управления обрабатываются аналоговые сигналы. Их
обработка осуществляется непрерывно функциональными элементами
системы.
Цифровое (дискретное) управление.
При этом виде управления обрабатываются цифровые сигналы. Информация
представляется в цифровой форме. Функциональными элементами являются
счетчики, регистры, ячейки памяти, счетные устройства и т.д.
Двоичное управление.
При этом виде управления обрабатываются двоичные сигналы, которые не
являются составной частью информации, представленной в цифровой
форме.
Рис. 6.2. Классификация форм представления информации
Виды обработки сигналов Синхронное управление.
Управление, при котором обработка сигналов синхронизированна с
тактовым импульсом.
Асинхронное управление.
Управление, осуществляемое без тактовых импульсов, при котором
изменение выходных сигналов происходит только за счет переключения
входных сигналов.
Логическое управление.
Управление, при котором поле значений входных сигналов формирует
определенное поле значений выходных сигналов на основе связей,
выражаемых в терминах Булевой алгебры. Прежние названия, например:
параллельное управление, следящее управление или блокировочное
управление, в стандарте DIN 19237 не упоминаются.
Последовательное управление.
Управление с принудительным пошаговым процессом, при котором
переключение программы от шага к шагу зависит от определенных
условий, выполняемых в ходе процесса. Алгоритм программы такого
управления может иметь переходы, петли, разветвления и т.д. Такие
прежние названия, как программное управление или тактовое
управление, в стандарте DIN 19237 не упоминаются.
Последовательное управление подразделяется на две подгруппы.
Последовательное управление по времени.
Управление, при котором условия переключения зависят только от
времени.
Для осуществления этого вида управления используются реле времени,
счетчики времени или задающие валы с постоянным числом оборотов.
Понятие "Схемы с управлением по времени" по DIN 19226 заменяется
понятием "Формирование входной величины в зависимости от времени".
Последовательное управление по состоянию процесса. Последовательное
управление, при котором условие дальнейшего переключения зависит
только от сигналов, поступающих от управ- ляемой системы.
Понятие "Схемы с управлением по перемещению" по DIN 19226 - тоже
самое, что последовательное управление по состоянию процесса, при
котором условие дальнейшего переключения зависит только от сигнала о
перемещении объекта управления.
Проектирование систем управления
При разработке систем управления необходима четкая
постановка задачи. Известно несколько способов представления
задачи в описательной или графической форме. Системы
управления должны быть снабжены следующей документацией:
эскиз объекта управления,
диаграмма "перемещение-шаг",
диаграмма "перемещение-время",
диаграмма управления,
диаграмма функционирования,
функциональная схема,
принципиальная схема.
Эскиз объекта управления
Эскиз объекта управления дает представление о пространственном
расположении исполнительных устройств на установке, работой которой
управляет пневматическая система. Обычно эскиз изображается не в
масштабе и не очень подробно, но ориентация исполнительных устройств
показывается правильно. Эскиз сопровождается описанием работы
установки (машины) и диаграммой движения исполнительных устройств.
Рис. 6.4. Пример эскиза объекта управления
Диаграмма "перемещение-шаг"
Диаграмма "перемещение-шаг" и диаграмма "перемещение-время" являются
диаграммами движения. Диаграмма "перемещение-шаг" применяется для
схематического представления последовательности движения. Диаграмма
показывает последовательность работы исполнительных устройств. На
ней представляется зависимость пути от шага.
Если система состоит из нескольких исполнительных устройств, то их
перемещения изображаются на диаграмме одно под другим. Сравнивая
положение отдельных исполнительных устройств на каждом шаге, можно
установить взаимосвязь между их положением.
Рис. 6.5. Диаграмма "перемещение-шаг"
На диаграмме (рис.6.5) показано перемещение штоков двух цилиндров
1.0 и 2.0. На шаге 1 выдвигается шток цилиндра 1.0, а на шаге 2 -
шток цилиндра 2.0. На шаге 3 шток цилиндра 1.0 втягивается, а на
шаге 4 втягивается шток цилиндра 2.0. Шаг 5 эквивалентен шагу 1.
По диаграмме "перемещение-время" устанавливается зависимость пути от
времени.
Рис. 6.6. Диаграмма "перемещение-время"
Диаграмма управления
На диаграмме управления представляется зависимость состояний
переключения информационных и управляющих элементов от шага. Время
их переключения не принимается во внимание.
Рис. 6.7. Диаграмма управления
Функциональная диаграмма
Функциональная диаграмма есть комбинация, состоящая из диаграммы
перемещения и диаграммы управления. Отдельные состояния системы
обозначаются линиями, называемыми функциональными линиями.
Рис. 6.8. Функциональная диаграмма
Наряду с функциональными линиями
на функциональной диаграмме могут изображаться линии сигналов,
которые описаны в нормах VDI 3260 "Функциональные диаграммы рабочих
машин и производственных установок".
Линии сигналов изображаются линией со стрелкой. Они выходят из
изображения информационных элементов и заканчиваются в том месте
диаграммы, где от действия этого сигнала должно осуществляться
изменение состояния. Стрелки на линии сигналов обозначают
направление действия сигнала управления.
Рис. 6.9. Изображение линий сигналов
Разветвление сигналов непосредственно на месте разветвления
обозначается точкой. От одного входного сигнала может изменяться
состояние нескольких устройств.
Для "ИЛИ"-функции в месте объединения сигнальных линий ставится
точка. В этом случае несколько входных сигналов независимо друг от
друга могут управлять одинаковым состоянием системы.
"И"-функция обозначается поперечным штрихом на месте пересечения
линий сигналов. Изменение состояния системы может произойти только в
том случае, если будут приложены все входные сигналы.
Рис. 6.10. Изображение входных устройств
Обозначение входных элементов размещается у основания
соответствующих линий сигналов.
Рис. 6.11. Диаграмма "перемещение-шаг" с линиями сигналов
Диаграмма описывает следующий процесс: если включается концевой
выключатель 1.4 и оператор нажимает кнопку 1.2, то выдвигается шток
цилиндра 1.0. Когда цилиндр 1.0 полностью выдвинется, то включится
концевой выключатель 2.2 и выдвинется шток цилиндра 2.0. Когда
цилиндр 2.0 выдвинется, то включится концевой выключатель 1.3 и шток
цилиндра 1.0 начнет втягиваться. Когда цилиндр 1.0 втянется, то
включится концевой выключатель 2.3 и начнет втягиваться цилиндр 2.0.
Когда шток цилиндра 2.0 втянется, то включится концевой выключатель
1.4, т.е. система вернется в исходное положение.
Краткий способ описания процесса
Краткий способ описания процесса дает представление о процессе
движения. В этом случае применяются обозначения движения штоков
цилиндров А, В и т.д. Процесс выдвижения обозначается знаком "+", а
втягивания - знаком "-".
Процесс А+ В+ В- А- означает: цилиндр А выдвигается, цилиндр В
выдвигается, цилиндр В втягивается, цилиндр А втягивается, т.е.
следующие друг за другом движения описываются последовательно друг
за другом.
Процесс А+В+В- А- означает: цилиндр А выдвигается, цилиндр В
выдвигается и цилиндр А втягивается, цилиндр В втягивается.
Одновременно происходящие движения изображаются один под другим.
При кратком способе описания концевые выключатели обозначаются теми
же буквами, что и цилиндры, с которыми они связаны, но маленькими
(строчными) буквами. При этом индекс "О" присваивается позиции
"втянуто", а индекс "1"- позиции "выдвинуто".
Функциональная схема
Функциональная схема дает ясную картину взаимодействия и
последовательности выполнения команд в пневматической системе. На
приведенной ниже функциональной схеме автоматической лепки представ-
Рис. 6.12. Функциональная схема: клепка
лен следующий процесс: зажимной цилиндр А выдвигается (А+) и
включается концевой выключатель а1. Сигнал а1 вызывает выдвижение
(В+) цилиндра В, т.е. процесс клепки завершается.
Выдвигающийся шток клепочного цилиндра В включает концевой
выключатель b1, который подает сигнал на втягивание клепочного
цилиндра (В-). Теперь срабатывает концевой выключатель b0, который
освобождает деталь от фиксации и вызывает втягивание (А-) цилиндра
А. Когда цилиндр А полностью втянется, включится концевой
выключатель а0. Сигнал а0 служит предпосылкой начала повторного
рабочего цикла.
Принципиальная схема
Принципиальная схема показывает взаимосвязь между элементами системы
управления и последовательность прохождения сигналов управления.
Принципиальная схема не дает представления ни о физических, ни о
механических аспектах процесса управления. Принципиальная схема
всегда показывает направление потоков энергии, которые должны быть
направлены на схеме снизу вверх. На различных по высоте чертежа
уровнях схемы изображаются источники энергии, ин- формационные,
логико-вычислительные, управляющие и исполнительные элементы.
Положение концевых выключателей показывается рядом с исполнительными
элементами. Элементы обозначаются в соответствии с нумерацией цепей
управления системы, а трубопроводы - по номерам присоединительных
каналов элементов. Эти обозначения делают читаемой принципиальную
схему системы управления и позволяют легко заказывать элементы.
Рис. 6.13. Пример принципиальной схемы
Аспекты совершенствования пневмораспределителей
Важным элементом передачи сигнала от процессора к
исполнительному устройству с поступательным или вращательным
движением выходного звена является распределитель. Выбор
размеров и типа распределителя влияет на большинство
выходных характеристик привода.
Совершенствование распределителей осуществляется по
следующим направлениям:
блочный монтаж с общим подводом питания и выхлопом;
снижение потерь энергии за счет применения распределителей непрямого
действия (с пилотными клапанами);
многофункциональные распределители, изменение свойств которых
осуществляется за счет применения различных вариантов шайб и
уплотнений;
замена традиционных материалов на пластмассы и широкое применение
штамповки;
интеграция нескольких распределителей в один функциональный блок
(тактовые цепочки);
монтаж распределителя на цилиндре.
Установленные на коллекторе распределители используют общий подвод
питания (в центре) и общий выхлоп (по бокам). Если требуется, то
выхлопные тракты с помощью трубопроводов могут быть отведены в любое
место и снабжены индивидуальными или общими глушителями. Компактная
и прочная конструкция коллекторов отвечает идее создания локальных
постов управления.
Рис. 6.14. Блок клапанов, установленный на коллекторе
Специальные устройства и модули
В пневмоавтоматике под термином специальные устройства (блоки
управления) понимается комбинация исполнительных и управляющих
элементов в едином конструктивном блоке. Простейшим примером блока
управления может служить комбинация цилиндра и распределителя. Для
приведения такого блока в действие после монтажа необходима только
подача сжатого воздуха под давлением. В зависимости от решаемой
задачи в блок могут входить цилиндры и распределители различных
типов. Такое устройство, имея согласованные друг с другом составные
части, является линейным приводом, готовым к эксплуатации после
установки на объекте управления.
Поворотный стол
В некоторых производственных процессах необходимо обеспечить
движение рабочего органа по окружности с рядом фиксированных
значений угла поворота. Для этих целей используются поворотные столы
с фиксацией промежуточных положений. Исполнительным элементом такого
устройства служит пневматический цилиндр, который получает сигнал от
пневматического блока управления.
Рис. 6.15. Поворотный шаговый стол
Рис. 6.16. Пример применения поворотного шагового стола
Представленный на рис. 6.16 обрабатывающий центр выполняет ряд
функций:
Поворотный стол - шаговое вращение.
Станция 1 - обработка детали.
Станции 2-7 - прием, позиционирование и фиксация детали.
Станция 8 - выдача детали.
На поворотном столе могут проводиться различные процессы
последовательной обработки детали. При этом только один раз деталь
поступает и устанавливается для обработки и только один раз снимается и
выдается с обрабатывающего центра.
Поворотный стол пригоден для поворотных тактовых работ на монтажных и
упаковочных автоматах, а также в обрабатывающих центрах.
Шаговое подающее устройство
Ниже показано шаговое подающее устройство с зажимающей и подающей
цангой. Оно служит для шагового перемещения лент, полос, стержней,
профилей и труб из металла, пластмассы, дерева и текстиля. Шаговое
подающее устройство может как толкать, так и тянуть заготовки. Скорость
и величина подачи, а также усилие зажима и усилие подачи могут
настраиваться.
Рис. 6.17. Пневматическое шаговое подающее устройство
Ширина подаваемого материала может достигать 200 мм. Точность
позиционирования зависит от требуемой точности подачи и веса материала и
находится в диапазоне 0,02...0,05 мм.
Рис. 6.18. Шаговое подающее устройство
Пневмогидравлическое подающее устройство
Эти устройства устанавливаются там, где требуется постоянная сила при
переменной внешней нагрузке.
Пневматический цилиндр, гидравлический цилиндр и блок пневматического
управления образуют компактный модуль. Гидравлический цилиндр
соединяется с пневматическим цилиндром с помощью коромысла.
Благодаря гидравлическому тормозному цилиндру обеспечивается постоянная
скорость подачи, которая может настраиваться с помощью дросселя.
Во время подачи возможно переключение на ускоренный ход. Благодаря
пневматическому сигналу на блоке управления устанавливается связь с
соответствующим дросселем тормозного цилиндра. Как только появляется
сигнал, движение подающего устройства ускоряется. Ускорение возможно и в
противоположном направлении движения.
Рис. 6.19. Пневмогидравлическре подающее устройство
Часть С РЕШЕНИЯ
Решения
В этой части приведены решения к упражнениям из главы 5 части А.
Постановка задачи.
Упражнение 1. Прямое управление цилиндром двустороннего действия
Шток цилиндра двустороннего действия выдвигается при нажатии
пневмокнопки. При отпускании кнопки шток втягивается. Цилиндр имеет
небольшой диаметр поршня (25 мм) и для работы на требуемой скорости
потребляет небольшой расход воздуха.
Рис. 1. Принципиальная схема с 5/2-распределителем
Решение.
Для управления цилиндром двустороннего действия можно выбрать следующие
распределители с ручным управлением:
5/2-распределитель,
4/2-распределитель.
В исходной позиции кнопка распределителя не нажата, штоковая полость
цилиндра находится под давлением и шток цилиндра втянут. При нажатии на
кнопку распределителя 1.1 воздух проходит от канала питания 1(Р) к
выходу 4(A) и, попадая в поршневую полость цилиндра, заставляет его шток
выдвигаться. При этом вытесняемый из штоковой полости воздух через
каналы 2(B) и 3(S) вытекает в атмосферу. При отпускании кнопки
распределителя 1.1 пружина возвращает его в исходное положение, при
котором питание поступает на выход 2(B),
А выход 4(A) через канал 5(R) сообщается с атмосферой. Шток цилиндра
втягивается.
Если кнопку отпустить, то движение сразу изменит направление и шток
втянется. Возможно изменение направления движения без достижения поршнем
его исходной или конечной позиции.
Рис. 2. Принципиальная схема с 4/2-распределителем
Упражнение 2. Непрямое управление цилиндром двустороннего действия
Постановка задачи.
Шток цилиндра двустороннего действия выдвигается при нажатии на кнопку и
после ее отпускания шток втягивается. Цилиндр имеет диаметр поршня 250
мм и поэтому потребляет большой расход воздуха.
Рис. 3. Принципиальная схема с 4/2-распределителем
Решение.
Для управления цилиндром с большим потреблением воздуха рекомендуется
применять управляющий распределитель с большим условным проходом. Сила,
необходимая для его переключения, может оказаться достаточно большой, и
в этом случае предпочтительным оказы- вается непрямое управление.
При нажатии на кнопку 1.2 на ее выходе 2(A) появляется пневматический
сигнал, поступающий на вход 14(Z) распределителя 1.1. Распределитель
переключается, на его выходе 4(A) появляется давление, заставляющее шток
цилиндра выдвигаться. После отпускания кнопки управляющий канал 14(Z)
распределителя 1.1 соединяется с атмосферой. При этом распределитель 1.1
переключается и шток втягивается.
Если кнопка 1.2 отпущена еще до того, как шток цилиндра 1.0 полностью
выдвинулся, то направление движения меняется и шток втягивается.
Изменение направления движения возможно в том случае, если шток цилиндра
еще не достиг своей исходной или конечной позиции. Так как
распределитель 1.1 не обладает свойством памяти, то он изменяет свою
позицию сразу после отпускания кнопки распределителя 1.2.
Рис. 4. Принципиальная схема с 5/2-распределителем
Упражнение 3. Логическая "И"-функция
Постановка задачи.
Шток поршня цилиндра 1.1 должен выдвигаться только в том случае, если
деталь установлена на станок, защитная сетка опущена и оператором нажата
кнопка распределителя. После отпускания кнопки распределителя или
смещения защитной сетки с ее нижнего положения цилиндр 1.0 возвращается
в исходное положение.
Рис. 5. Принципиальная схема
Решение.
Логическая "И"-функция выходных сигналов распределителей 1.2, 1.4 и 1.6
реализуется на выходе группы клапанов двух давлений 1.8 и 1.10.
Если включены распределители 1.4 (от детали), 1.6 (от защитной сетки) и
1.2 (от оператора), то появляется сигнал на выходе А клапана двух
давлений 1.10. Этот сигнал поступает в канал управления 14(Z)
управляющего распределителя 1.1. Распределитель переключается, в
поршневую полость цилиндра 1.0 поступает сжатый воздух и шток
выдвигается.
Освобождение кнопок или открытие защитной сетки приводит к тому, что
больше не выполняется "И"- условие. В управляющем канале 14(Z)
распределителя 1.1 исчезает давление. Распределитель 1.1 под действием
пружины переключается и шток втягивается.
Упражнение 4. Логическая "ИЛИ"-функция
Постановка задачи.
Для подачи деталей из магазина используется цилиндр двустороннего
действия. Шток поршня цилиндра выдвигается полностью при нажатии на
кнопку или на ножную педаль. При достижении крайнего выдвинутого
положения шток должен начать втягиваться. Для опроса конечного положения
используется 3/2-распределитель с управлением от рычага с роликом.
Рис. 6. Принципиальная схема
Решение.
Логическое "ИЛИ"-условие выходных сигналов распределителей 1.2 и 1.4
реализуется с помощью перекидного клапана 1.6.
При нажатии кнопки распределителя 1.2 или педали распределителя 1.4 на
входах X или Y перекидного клапана 1.6 появляется сигнал. "ИЛИ"-условие
выполняется и сигнал поступает на управляющий вход 14(Z) распределителя
1.1. Распределитель 1.1 переключается, в поршневую полость цилиндра
поступает воздух под давлением, и поршень выдвигается.
При отпускании управляющих распределителей (кнопки и педали) сигнал в
канале управления 14(Z) распределителя 1.1 снимается. Так как
распределитель 1.1 обладает свойством памяти, то его положение не
изменяется. Когда шток цилиндра полностью выдвинется, то включится
концевой выключатель 1.3. Тогда поступит сигнал в канал управления 12(Y)
распределителя 1.1.
Распределитель 1.1 переключится, и его шток втянется.
Если в ходе процесса втягивания концевой выключатель 1.3 выключить, то
можно изменить направление движения штока, нажав кнопку или педаль даже
в том случае, если шток еще не достиг своей исходной позиции.
Упражнение 5. Схема с памятью и управление скоростью движения штока
цилиндра
Постановка задачи.
Цилиндр двустороннего действия должен выталкивать детали из магазина на
лоток. Шток цилиндра должен полностью выдвигаться при нажатии на кнопку
и втягиваться после достижения крайнего положения. Сигнал о приходе
штока в крайнее выдвинутое положение должен поступать от концевого
выключателя с управлением от рычага с роликом. Шток цилиндра должен
продолжать двигаться вперед, даже если кнопка будет отпущена еще до
того, как он полностью выдвинется. Скорость поршня цилиндра должна
регулироваться в обоих направлениях.
Рис. 7. Принципиальная схема
Решение.
Ответ на вопрос 1.
Когда шток достигнет своей конечной позиции, то включится концевой
выключатель 1.3. Если кнопка
1.2 остается при этом включенной, то переключение распределителя 1.1
невозможно. В обоих каналах управления 12(Y) и 14(Z) есть управляющее
давление. При этом сигнал 14(Z) доминирует. Система не может осуществить
действие в соответствии с сигналом в канале управления 12(Y). Шток
остается в выдвинутом положении. Втягивание штока возможно только в том
случае, если кнопка 1.2 выключится, и при этом снимется давление в
управляющем канале 14(Z).
Ответ на вопрос 2.
Если распределитель с роликовым рычагом установлен в среднем положении
по ходу поршня, то шток, достигнув этого положения, начнет втягиваться.
Это возможно при условии, что кнопка 1.2 была уже отпущена. Если кнопка
1.2 к этому моменту времени еще не отпущена, то шток проследует мимо
концевого выключателя 1.3 и будет выдвигаться до удара о крышку
цилиндра. Обратный ход возможен только при ручном воздействии на
распределитель с роликовым рычагом 1.3 или с помощью кнопки
вспомогательного ручного управления распределителя!.1.
Ответ на вопрос 3.
В исходном положении системы распределители 1.2 и 1.3 выключены.
Распределитель 1.1 находится в позиции, при которой канал 1(Р) соединен
с каналом 2(B), а канал 4(A) - с каналом 5(R). При этом штоковая полость
цилиндра 1.0 находится под давлением и шток остается во втянутом
положении.
Ответ на вопрос 4.
При нажатии кнопки 1.2 подается сигнал на вход 14(Z) распределителя 1.1.
Распределитель 1.1 переключается, в поршневую полость цилиндра 1.0
подается давление и шток выдвигается. В конце своего хода шток включит
концевой выключатель 1.3 и сигнал управления поступит в канал управления
12(Y) распределителя 1.1. Он переключается, и шток втягивается.
Скорость поршня настраивается с помощью регулировочных винтов дросселей
1.01 и 1.02,
обеспечивающих дросселирование потока воздуха, вытесняемого из полостей
цилиндра.
После снятия управляющего воздействия с распределителей 1.2 и 1.3 тотчас
снимается давление в управляющих каналах распределителя 1.1. Применение
распределителя с двусторонним управлением (распре-делителя с памятью) в
качестве управляющего распределителя 1.1 обеспечивает сохранение
занимаемой позиции переключения после снятия давления в каналах
управления.
Упражнение 6. Клапан быстрого выхлопа
Постановка задачи.
При совместном срабатывании распределителя с управлением от кнопки и
концевого выключателя, управляемого от рычага с роликом, гибочный
инструмент наезжает на кромку заготовки и кантует материал. Инструмент
приводится в движение штоком цилиндра двустороннего действия. Для
повышения скорости выдвижения штока в схеме использован клапан быстрого
выхлопа. Скорость втягивания штока поршня должна быть регулируемой. Если
какая-либо из кнопок будет отпущена, шток цилиндра медленно возвратится
в исходное положение.
Рис. 8. Принципиальная схема
Решение.
В исходном положении лежащая деталь воздействует на распределитель с
роликовым рычагом 1.4. Клапан быстрого выхлопа 1.02 изолирован от
атмосферы, штоковая полость цилиндра находится под давлением, шток
остается во втянутом положении.
При нажатии на кнопку 1.2 к обоим входам (X) и (Y) клапана двух давлений
1.6 поступят сигналы. "И"- условие выполняется и сигнал с выхода клапана
1.6 передается на управляющий вход 14(Z) управляющего распределителя
1.1. Распределитель 1.1 переключается, в поршневую полость цилиндра 1.0
поступает воздух под давлением и шток выдвигается. При переключении
распределителя 1.1 со входа 1(Р) клапана быстрого выхлопа 1.02 снимается
давление. Во время процесса выдвижения штока цилиндра из его штоковой
полости вытесняется воздух, который открывает клапан быстрого выхлопа,
вытекая через его канал 3(R) прямо в атмосферу.
Сопротивление течению вытесняемого воздуха, которое могли бы создать (в
схеме без клапана
быстрого выхлопа) распределитель 1.1 и трубопроводы, пропадает. Поэтому
шток может двигаться быстрее.
Если один из двух распределителей 1.2 или 1.4 освободить от воздействия,
то на выходе клапана двух давлений 1.6 больше не выполняется
"И"-условие. Распределитель 1.1 переключается, клапан быстрого выхлопа
1.02 закрывается и шток втягивается.
Скорость движения штока может настраиваться с помощью винта
дросселирующего элемента дросселя с обратным клапаном.
Упражнение 7. Управление по давлению
Постановка задачи.
Тиснение на пластмассовые детали наносится штампом, приводимым в
движение цилиндром двустороннего действия. Штамп опускается на деталь
при нажатии кнопки, а возвращается в исходное положение автоматически,
когда шток достигнет крайнего положения и давление в поршневой полости
повысится до установленного значения. Достижение крайнего выдвинутого
положения штока контролируется концевым выключателем, управляемым от
рычага с роликом. Усилие тиснения должно быть настраиваемым. Давление в
поршневой полости цилиндра должно измеряться с помощью манометра.
Рис. 9. Принципиальная схема
Решение.
В исходном положении распределители 1.2 и 1.3 выключены, штоковая
полость цилиндра находится под давлением и шток втянут. Если это
необходимо, то с помощью кнопок вспомогательного ручного управления
распределителя 1.1 система может быть установлена в исходное положение.
При воздействии на кнопку 1.2 подается сигнал в канал управления 14(Z)
управляющего распределителя 1.1. Распределитель 1.1 переключается, в
поршневую полость цилиндра подается давление и шток выдвигается. Если
кнопку 1.2 отпустить, то положение распределителя с двусторонним
пневматическим управлением 1.1 не изменится, так как он обладает
свойством памяти. Когда шток полностью выдвинется, достигнув переднего
конечного положения (позиция прессования), то включится концевой
выключатель 1.3. Сработавший распределитель с роликовым рычагом 1.3
откроет проход воздуха к каналу 1(Р) клапана последовательности давлений
1.5. Во время процесса прессования начинает подниматься давление в
поршневой полости цилиндра. Стрелка манометра
поворачивается вправо. Когда это давление, подаваемое в канал управления
12(Z) клапана последовательности давлений 1.5, достигнет уровня
настройки, включится 3/2-распределитель клапана последовательности
давлений. Управляющий распределитель 1.1 переключится и шток втянется.
Во время процесса втягивания выключится концевой выключатель 1.3 и
снимется сигнал в канале управления 12(Y) распределителя 1.1. При этом
выключится клапан последовательности давлений.
Упражнение 8. Клапан выдержки времени
Постановка задачи.
Для прижимания склеиваемых деталей друг к другу используется цилиндр
двустороннего действия. При нажатии на кнопку шток поршня прессового
цилиндра выдвигается. Когда пресс прижмет деталь, он должен остаться в
этом положении в течение 6 секунд, после чего шток должен автоматически
вернуться в исходное положение. Начало нового цикла возможно только при
условии полного втягивания штока и сохранении этого положения в течение
5 секунд. За это время склеенные детали вручную вынимаются из пресса, а
на их место устанавливаются новые. Выдвижение штока цилиндра должно
происходить медленно, а втягивание относительно быстро, но с
возможностью регулирования скорости.
Рис. 10. Принципиальная схема
Решение.
В исходном положении распределитель с роликовым рычагом 1.4, находящийся
под воздействием штока, включен и переключен клапан выдержки времени
1.6, т.е. на его выходном канале 2(A) имеется сигнал. Условиями старта
системы являются:
распределитель с роликовым рычагом 1.4 включен,
клапан выдержки времени 1.6 переключен,
кнопка пуска 1.2 включена.
Если концевой выключатель 1.4 продолжительно включен (t = 5 сек), то
пневмоемкость клапана выдержки времени 1.6 уже наполнилась, а
принадлежащий ему 3/2-распределитель переключился, что вызвало появление
сигнала на входе Y клапана двух давлений 1.8.
При нажатии кнопки 1.2 выполняется "И"-условие на выходе клапана двух
давлений 1.8. На управляющий вход 14(Z) распределителя 1.1 поступает
сигнал. Распределитель 1.1 переключается, в поршневую полость цилиндра
1.0 подается давление и шток выдвигается. После начала выдвижения штока
выключается концевой выключатель 1.4, пневмоемкость клапана выдержки
времени 1.6 опорожняется через каналы распределителя с роликовым рычагом
1.4, и 3/2-распределитель клапана
1.6 возвращается в исходное положение. "И"-условие на клапане двух
давлений больше не выполняется. С кнопки 1.2 снимается воздействие.
Когда шток полностью выдвинется, то включится распределитель с роликовым
рычагом 1.3. Появится давление питания клапана выдержки времени 1.5 и
давление в его пневмоемкости начнет подниматься. Скорость возрастания
давления настраивается встроенным в него дросселем. Если достигается
давление срабатывания, то переключается встроенный в клапан
3/2-распределитель и на управляющем входе 12(Y) распределителя 1.1
появляется сигнал. Распределитель 1.1 пере- ключается и шток
втягивается. После выключения концевого выключателя 1.3 клапан выдержки
времени возвращается в исходное состояние.
Когда шток займет исходное положение, включится концевой выключатель
1.4. Давление в пневмоемкости клапана выдержки времени 1.6 начнет
подниматься и через 5 сек достигнет давления переключения. Встроенный в
клапан 3/2-распределитель переключится. Таким образом, система приходит
в исходное состояние и может начинаться новый цикл.
Скорость штока настраивается с помощью винтов дросселей, входящих в
состав дросселей с обратным клапаном 1.01 и 1.02, осуществляющих
дросселирование потока воздуха, вытесняемого из полостей цилиндра в
атмосферу.
Действующие и предварительные стандарты
Список литературы
DIN ISO 1219 Пневмогидравлические системы и устройства. Графические
обозначения.
DIN 1343 Рекомендуемые ряды размеров, нормальные ряды, нормальные
объемы. Понятия, значения.
DIN 19226 Техника регулирования и управления. Понятия и обозначения.
DIN 19237 Измерение, управление, регулирование, техника управления.
Понятия. DIN ISO 5599-3, часть 1 Техника гидро- и пневмоавтоматики,
пятилинейные пневмораспределители, монтажная поверхность, общие понятия.
СЕТОР RP 68P REV. Правила обозначения присоединений и способов
управления пневматическими распределителями и другими пневматическими
устройствами (временные рекомендации).
DIN 40719, часть 6 Схемотехника. Правила составления документации.
DIN VDE 0113, часть 1 Электрическое оснащение промышленных машин в
соответствии с EN 60204. VDI 3226 Пневматическое управление.
Принципиальные схемы.
VDI 3260 Функциональные диаграммы рабочих машин и производственных
установок.
Литература
Bissinger N., Meixner H. Einfache Speicher- und
Verknuepfungsschaltungen, Festo Didactic, Esslingen, 1987 (Простые
логические схемы и схемы с памятью)
Bocksnick В. Grundlagen der Steuerungstechnik, Festo Didactic,
Esslingen, 1988 (Основы техники управления) Deppert W., Stoll K.
Pneumatische Steuerungen, VogelVerlag, 1985 (Пневматическое управление)
Deppert W., Stoll K. Pneumatik in der Holzverarbeitung, VogelVerlag,
1979 (Пневмоавтоматика в деревообработке) Deppert W., Stoll K. Pneumatik
in der Anwendung, VogelVerlag, 1983 (Пневмоавтоматика и ее применение)
Deppert W., Stoll К. Pneumatik in der Verpackungstechnik, VogelVerlag,
1983 (Пневмоавтоматика в упаковочной технике) Festo KG: Technische
Informationen, Pneumatik (Техническая информация, пневмоавтоматика)
Hasebrink H., Kobler R., Idler S. Grundlagen der pneumatischen
Steuerungstechnik, Festo Didactic, Esslingen, 1979 (Основы техники
пневмоавтоматики) Meixner H., Kobler R. Einfuehrung in die Pneumatik,
Esslingen, 1979 (Введение в пневмоавтоматику)
Meixner H., Kobler R. Wartung und Fehlersuche an Anlagen mit
pneumatischer Steuerung, Esslingen, 1991
(Обслуживание и поиск неисправностей в установках с пневматическим
управлением)
Условные обозначения
I
длина
м
m
масса
кг
t
время
с
Т
температура
К
F
сила
Н
А площадь м2
V объем м3
qv
объемный расход
м3/с
р
давление
Па(бар)
А площадь поршня м2А"
площадь поршня со стороны штока м2