Измерительные преобразователи, приборы и системы. Методические указания к выполнению лабораторных работ
Методические указания
к выполнению лабораторных работ по дисциплине
«Измерительные преобразователи, приборы и системы»
Содержание
Содержание
1
Лабораторная работа №1
3
ИССЛЕДОВАНИЕ ГИРОСКОПОВ НАПРАВЛЕНИЯ
3
1
Цель работы
3
2
Оборудование, измерительные приборы и инструменты
3
3
Содержание работы
3
3.1
Общие сведения
3
3.2
Погрешности гироскопов направления
5
3.3
Пилотажный гирополукомпас ГПК-48
6
3.4
Конструкция и принцип работы ГПК-52
8
4
Описание лабораторной установки для проверки ГПК-52
14
5
Порядок проведения работы
15
5.1
Проверка комплекта гирополукомпаса ГПК-52
15
5.2
Исследование виражных погрешностей ГПК-48 на вращающемся основании
15
5.3
Исследование кардановых погрешностей гироскопа направления
15
6
Содержание отчета
16
7
Контрольные вопросы
16
8
Литература
16
Лабораторная работа №2
17
ГИРОМАГНИТНЫЕ КОМПАСЫ
17
1
Цель работы
17
2
Оборудование, измерительные приборы, инструменты
17
3
Содержание работы
17
3.1
Общие сведения
17
3.2
Гиромагнитный компас ДГМК-3
20
3.2.1
Функциональная схема гиромагнитного компаса
20
3.2.2
Гироагрегат компаса ДГМК-3
22
3.2.3
Датчик магнитного курса ПДК-3
24
3.2.4
Усилитель компаса ДГМК-3
25
4
Программа и методика выполнения лабораторной работы
25
5
Содержание отчета
26
6
Контрольные вопросы
26
Лабораторная работа № 4
27
НАЗЕМНЫЙ МАЯТНИКОВЫЙ ГИРОКОМПАС
27
1
Цель работы
27
2
Оборудование, измерительные приборы и инструменты
27
3
Содержание
27
3.1
Общие сведения
27
3.2
Устройство гирокомпаса АГ
30
3.2.1
Гироузел
30
3.2.2
Угломерная часть
33
3.2.3
Преобразователь
38
4
Описание лабораторной установки
39
5
Порядок выполнения работы
39
6
Содержание отчета
41
7
Контрольные вопросы
41
8
Литература
42
Лабораторная работа №5
43
ИССЛЕДОВАНИЕ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ
43
1
Цель работы
43
1
2
Оборудование, измерительные приборы и инструменты
43
3
Содержание работы
43
3.1
Общие сведения
43
3.2
Краткая характеристика датчиков ДУСУ
47
3.3
Особенности конструкции прибора
48
3.4
Описание лабораторной установки
51
4
Методика проведения работы
52
5
Содержание отчета
53
6
Контрольные вопросы
53
7
Литература
53
Лабораторная работа №6
54
ИНТЕГРИРУЮЩИЕ ГИРОСКОПЫ
54
1
Цель работы
54
2
Оборудование, измерительные приборы и инструменты
54
3
Содержание работы
54
3.1
Общие сведения
54
3.2
Конструкция макета интегрирующего гироскопа
59
3.3
Описание лабораторной установки для исследования макета ИГ
60
4
Порядок проведения работы
61
5
Содержание отчета
61
6
Контрольные вопросы
61
Лабораторная работа № 7
62
АВИАГОРИЗОНТЫ
62
1.
Цель работы
62
2.
Оборудование, измерительные приборы, инструменты
62
3.
Содержание работы
62
4
Общие сведения
62
4.1
Авиагоризонт самолета-истребителя АГИ-1
64
4.2
Дистанционный авиагоризонт АГД-1
68
4.3
Описание лабораторной установки
75
4.3.1
Установка для проверки АГИ-1
75
4.3.2
Установка для проверки АГД-1
75
5
Порядок проведения работы
76
5.1
Проверка комплекта авиагоризонта АГД-1
76
5.2
Проверка авиагоризонта АГИ-1
76
6
Содержание отчета
77
7
Контрольные вопросы
77
8
Литература
78
2
Лабораторная работа №1
ИССЛЕДОВАНИЕ ГИРОСКОПОВ НАПРАВЛЕНИЯ
1 Цель работы
Целью работы является изучение принципа действия, схемы и конструк-
ции гироскопов направления, построенных на базе трехстепенного астатиче-
ского гироскопа на примере гирополукомпасов ГПК-48 и ГПК-52, проверка ги-
рополукомпаса ГПК-52 и исследование виражных погрешностей на вращаю-
щемся основании.
2 Оборудование, измерительные приборы и инструменты.
При выполнении работы используются действующие приборы ГПК-48 и
ГПК-52, установка для проверки датчика ГПК-52, вольтметр для измерения пе-
ременного напряжения с пределом измерения до 30 В, секундомер, поворотная
установка МПУ-1. При изучении конструкции приборов используются макеты
гирополукомпасов ГПК-48 и ГПК-52, а также плакаты конструкции ГПК-52.
3 Содержание работы
а) изучение принципа действия, схем и конструкции пилотажного и нави-
гационного гироскопов направления ГПК-48 и ГПК-52. При этом особое вни-
мание обратить на схему построения и конструкцию систем азимутальной и го-
ризонтальной коррекции, конструкцию гироузла, работу систем начальной ус-
тановки гироскопического курса, тип токоподводов на наружной и внутренней
осях подвеса, на работу механизма задержки проворота наружного карданного
кольца при сложении рамок, способ компенсации температурной и широтной
погрешностей;
б) исследование комплекта гирополукомпаса ГПК-52 по программе пе-
риодической проверки работоспособности прибора;
в) исследование виражных погрешностей ГПК-48.
3.1 Общие сведения
Для ручного или автоматического управления подвижным объектом по
курсу необходим датчик фиксированного азимутального направления, по кото-
рому можно было бы определять, отклонение объекта от заданного курса. В
случаях, когда время использования показаний такого датчика, невелико (от
минуты до нескольких часов) с успехом применяются гироскопы направления,
выгодно отличающиеся от других навигационных устройств простотой кон-
струкции и надежностью.
Гироскопом направления (ГН) называют трехстепенной астатический ги-
роскоп, снабженный горизонтальной и азимутальной системами коррекции; го-
ризонтальная коррекция удерживает ось гироскопа в плоскости горизонта; ази-
мутальная коррекция удерживает эту ось в заданном направлении относительно
земной системы координат.
3

ГН, в отличие от гирокомпаса, не имеет направляющей силы, удержи-
вающей главную ось в плоскости географического меридиана. Он обеспечивает
только сохранение любого первоначально заданного направления в азимуте,
точнее, обеспечивает малую скорость "ухода" от заданного направления. При
начальной выставке его главной оси в плоскость меридиана, он позволяет опре-
делять курс объекта в течение ограниченного промежутка времени, определяе-
мого скоростью "ухода" гироскопа и требуемой точностью определения курса.
В общем же случае ГН позволяет определять углы рыскания и изменения курса.
В связи с указанными особенностями ГН нередко (особенно в авиационной
технике) называют гирополукомпасами (ГПК).
Принцип действия ГН основан на свой-
H
стве свободного трехстепенного гироскопа
0 час
сохранять положение оси собственного вра-
щения неподвижной в инерциальном про-
6 час
странстве.
H
H
N
Рассмотрим поведение трехстепенно-
го астатического гироскопа на поверхности
18 час
Земли. В соответствии с рис. 1 положим,
H
12 час
что в начальный момент времени вектор
r
кинетического момента H
гироскопа, уста-
Рис. 1. Поведение трехстепенного гироскопа
новленного на экваторе, горизонтален и на-
на поверхности Земли
правлен вдоль линии экватора. Рисунок 1
представляет собой вид на Землю с Север-
ного полюса. Через 6 часов Земля повернется в пространстве на 90°, а свобод-
ный гироскоп сохранит направление кинетического момента неизменным в
инерциальном пространстве. Наблюдатель, находящийся на поверхности Зем-
ли, буде видеть, что гироскоп уходит от плоскости горизонта; это движение на-
зывают видимым или кажущимся уходом. Оно объясняется влиянием перенос-
ного движения основания в виде суточного вращения Земли. На рис. 2 показано
ортодромии (дуге большого круга, проходящей через начальный и конечный
пункты), видимый уход останется прежним − ω sinϕ
З
Для превращения свободного гироскопа в гироскоп направления, необхо-
димо компенсировать его видимый уход относительно земных плоскостей.
Уход оси гироскопа в азимуте приводит к появлению накапливающейся
азимутальной ошибки. Для его устранения применяется так называемая азиму-
тальная коррекция.
Для устранения отклонения оси гироскопа от плоскости горизонта при-
меняется ее нивелирование в горизонтальной плоскости с помощью маятнико-
вой или межрамочной горизонтальной коррекции.
Горизонтальная коррекция стремится установить главную ось гироскопа
или в плоскости горизонта, точнее, перпендикулярно к направлению отвеса (в
этом случае она называется маятниковой, поскольку чувствительными элемен-
тами коррекции являются маятники), или в положение, перпендикулярное к
плоскости наружной рамки, ось вращения которой предполагается вертикаль-
ной. В этом случае она называется горизонтальной межрамочной коррекцией
(или, иначе, коррекцией по рамке).
Азимутальная коррекция также может осуществляться двумя способами:
первый способ заключается в том, что относительно горизонтальной оси внут-
ренней рамки накладывается момент, вызывающий прецессию гироскопа отно-
сительно оси наружной рамки с угловой скоростью, равной скорости азиму-
V
тального ухода ω sinϕ
sin Ktgϕ
+
, но направленной в противоположную
З
R
сторону. В результате сложения этих двух скоростей положение оси ротора ги-
роскопа в азимуте остается относительно земных осей постоянным. Такая кор-
рекция называется моментной.
В указателях ортодромии компенсируется только составляющая от вра-
щения Земли, в указателях курса - и составляющая от движения объекта.
Второй способ азимутальной коррекции состоит в том, что гироскоп,
имея горизонтальную коррекцию (по рамке или маятниковую), свободно дви-
жется в азимуте.
Для получения неизменного направления в азимуте скорость этого дви-
жения компенсируется обратным поворотом картушки (шкалы) вокруг оси на-
ружной рамки с угловой скоростью, равной скорости азимутального ухода ги-
роскопа. Такая коррекция называется кинематической.
3.2 Погрешности гироскопов направления
Основными методическими погрешностями ГН являются:
− погрешности, обусловленные некорректируемыми составляющими вра-
щения земной системы координат вокруг вертикальной оси;
− карданные (геометрические) погрешности;
− баллистические погрешности, вызванные линейными ускорениями объекта;
5
− виражные погрешности ГН, а также погрешности, возникающие при качке.
К основным инструментальным погрешностям ГН относятся:
− погрешности из-за статической и динамической неуравновешенности ги-
роузла.
− погрешности, вызываемые трением в осях подвеса;
− погрешности, вызываемые неточностью азимутальной коррекции;
− шкаловые погрешности;
− погрешности, вызываемые наличием люфтов (зазоров) в главной оси ги-
роскопа и в осях его подвеса.
3.3 Пилотажный гирополукомпас ГПК-48
Гирополукомпас ГПК-48 является простейшим гироскопическим прибо-
ром курса и предназначается для выдерживания курса движения самолета в те-
чение непродолжительного времени (10-15 мин) и выполнения разворотов на
заданный угол. Одной из модификаций этого прибора является танковый при-
бор курса ГПК-59.
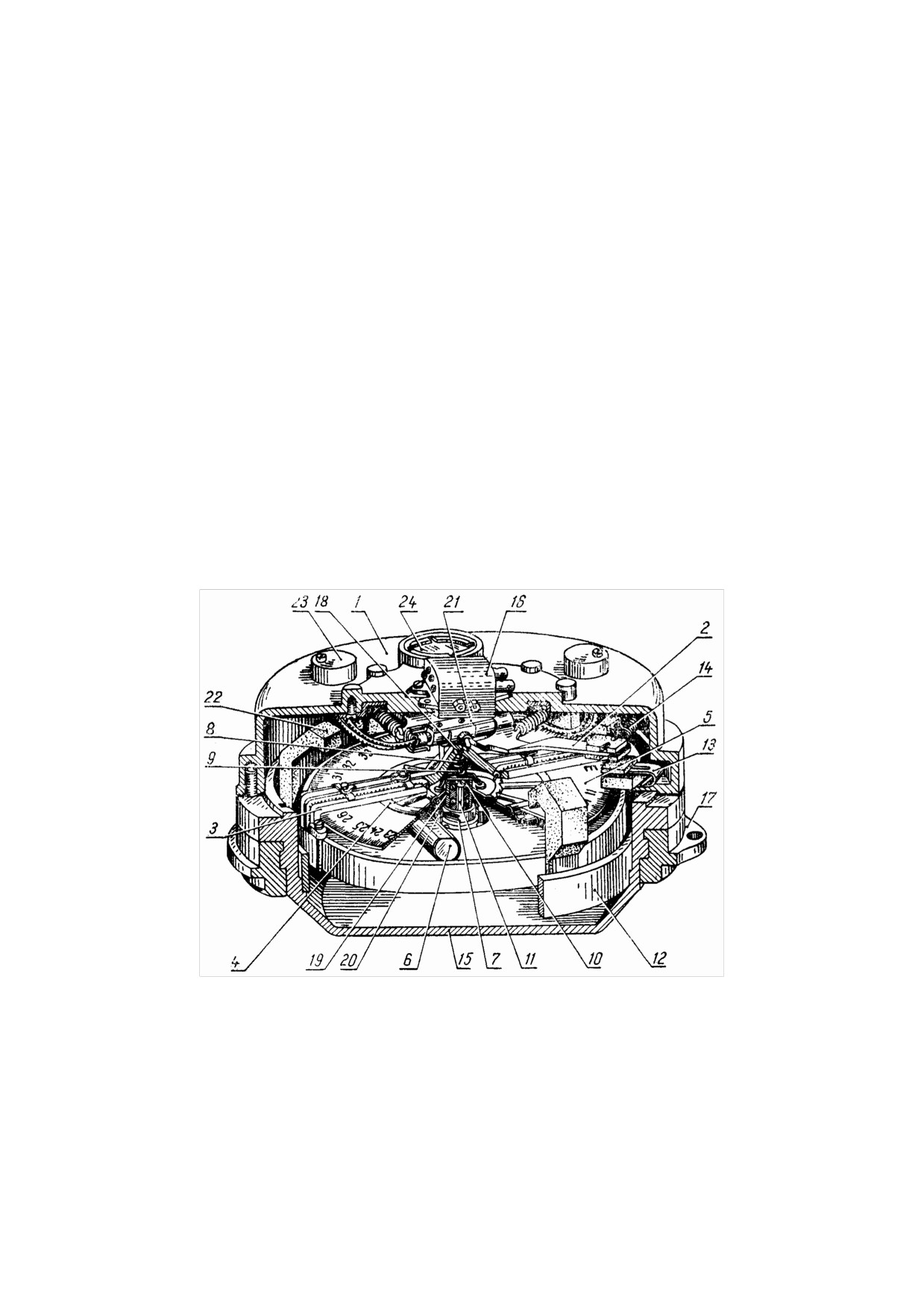
Конструкция прибора представлена на рис. 3.
Основным элементом гирополукомпаса является гироскоп с тремя степе-
нями свободы. Карданный узел состоит из гиромотора 1, помещенного в на-
ружную рамку 2. Гиромотор представляет собой асинхронный двигатель пере-
менного трехфазного тока типа ГМ-4, питаемый напряжением 36В, частотой
400Гц. Три конца обмотки статора гиромотора выведены через полую ось. К
кожуху гиромотора прикреплены две стальные полуоси, на которые насажены
внутренние кольца подшипников. Наружные кольца подшипников связаны с
наружной рамкой 3. Одно из наружных колец имеет возможность перемещать-
ся в осевом направлении при температурных изменениях деталей прибора. На-
ружная рамка карданного узла вращается в подшипниках 7 магнетного типа.
Наружное кольцо верхнего подшипника установлено в стальной втулке,
имеющей возможность перемещаться в осевом направлении внутри бронзовой
втулки с фланцем, закрепленной в верхней крышке корпуса прибора. Для уст-
ранения осевого люфта наружной рамки над стальной втулкой помещена ком-
пенсационная бронзовая пружина, натяг которой регулируется прокладкой. К
верхней части наружной рамки гироузла прикреплены картушка с ценой деле-
ния 1° и оцифровкой через 10°, и ротор двигателя горизонтальной коррекции.
По картушке при помощи курсовой черты, имеющейся на корпусе прибора, от-
читывается курс самолета.
Статор коррекционного двигателя 7 закреплен с верхней крышкой корпу-
са прибора. Он представляет собой "беличью клетку", пакет которой составля-
ют высечки, отштампованные из электротехнической стали, залитые алюми-
ниевым сплавом.
Внутренняя рамка (кожух) имеет свободу вращения в пределах ±75° от-
носительно наружной рамки. Наружная рамка, в свою очередь, может повора-
чиваться относительно своей оси на неограниченный угол.
6
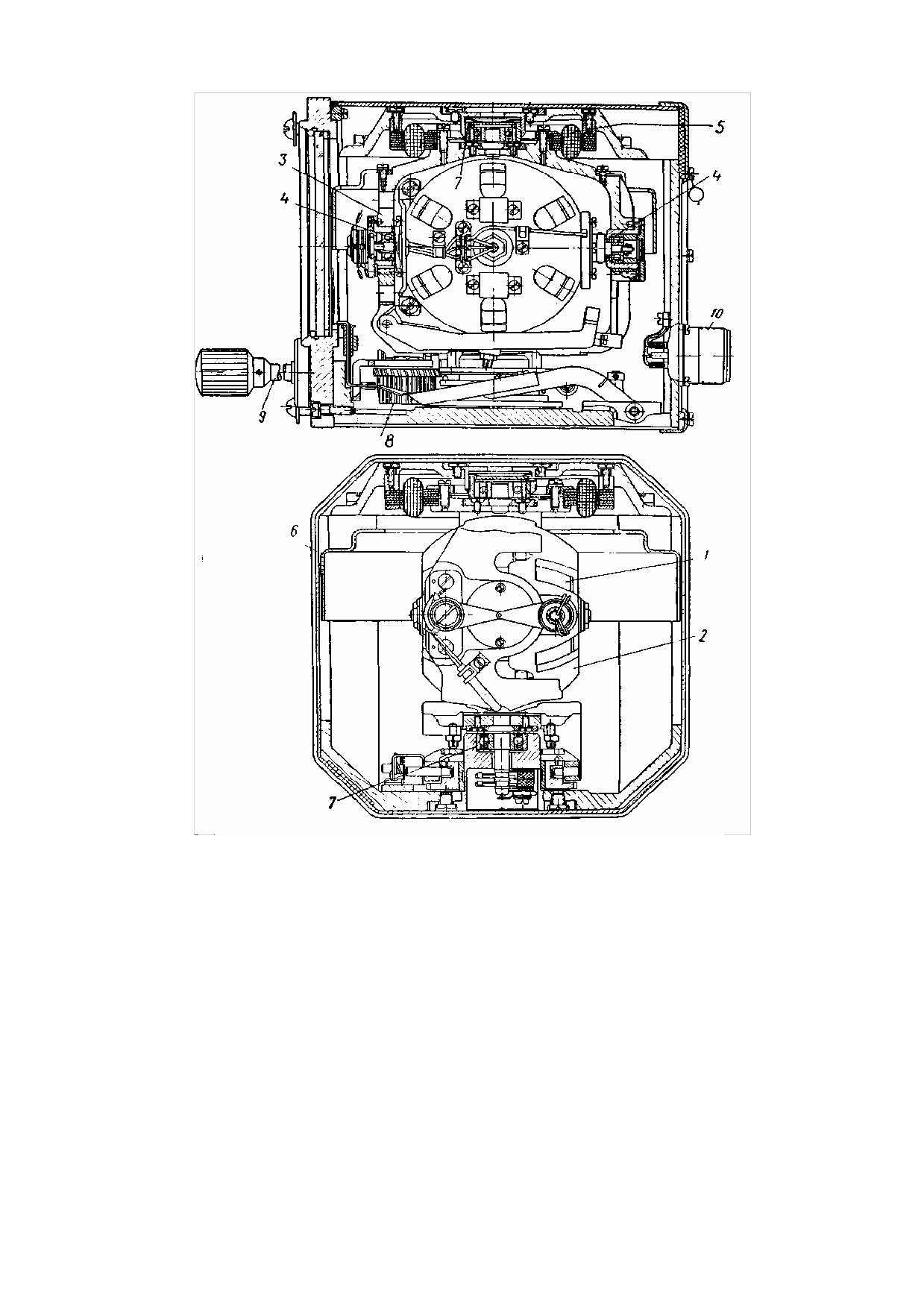
Рис. 3. Конструкция гирополукомпаса ГПК 48
Гирополукомпас имеет горизонтальную межрамочную коррекцию, удер-
живающую главную ось гироскопа под углом 90° к оси наружной рамки.
При отклонении главной оси гироскопа от перпендикуляра к оси наруж-
ной рамки замыкаются контакты датчика углов, включающие коррекционный
двигатель 5. Коррекционный двигатель начинает работать только при наруше-
нии перпендикулярности главной оси гироскопа на 4° относительно оси наруж-
ной рамки.
Коррекционный момент, действующий на наружную рамку карданового
подвеса, заставляет прецессировать гироузел до восстановления перпендику-
лярности главной оси гироскопа относительно плоскости наружной рамки. В
качестве коррекционного двигателя применен двухфазный асинхронный мно-
гополюсный двигатель, работающий в заторможенном режиме.
7

В гирополукомпасе ГПК-48 отсутствует азимутальная коррекция. Для ус-
тановки заданного курса прибор имеет арретирующее устройство 8, позволяю-
щее поворачивать гироузел вместе с картушкой. Арретирующий механизм по-
следовательного действия смонтирован в нижней части прибора. При нажатии
на ручку арретира 9 происходит фиксация гироузла. При вращении ручки арре-
тира ее поворот передается на наружную рамку.
Подвод питания к двигателю гироузла и коррекционному двигателю
осуществляется через щеточные (коллекторные) токоподводы.
Для уменьшения момента трения по оси внутренней рамки используют
точечные токоподводы. Группы контактов расположены в них так, что сопри-
косновение подвижных и неподвижных контактов происходит в точках, распо-
ложенных по геометрической оси вращении кожуха двигателя гироузла.
Основные технические характеристики ГПК-48
− Питание прибора - трехфазный ток напряжением 36± 4в, частотой 400гц
±10%;
− Потребляемая мощность 12вт;
− момент инерции ротора 1,8 Гсмс2;
− Скорость вращения 21000 об/мин;
− Кинетический момент 4000 Гсмс;
− Рабочий диапазон температуры от +50° до -60°С;
− Скорость ухода в азимуте - 3°+5° за 15 мин.
3.4 Конструкция и принцип работы ГПК-52
В отличие от ГПК-48, гирополукомпас ГПК-52 является не только пило-
тажным, но и навигационным прибором. ГПК-52 позволяет длительное время
(1-2 часа) выдерживать направление полета по заданной ортодромии (дуге
большого круга на земной сфере) с точностью до ухода гироскопа.
Гирополукомпас ГПК-52 может быть использован при самолетовождении
на любых широтах северного полушария.
Ось ротора гироскопа в приборе удерживается в плоскости горизонта с
помощью горизонтальной маятниковой коррекции. Гирополукомпас ГПК-52
имеет азимутальную коррекцию, предназначенную для компенсации кажуще-
гося ухода оси ротора, вызванного вертикальной составляющей вектора угло-
вой скорости суточного вращения Земли.
Угловая скорость кажущегося ухода гироскопа в азимуте из-за вращения
Земли равна:
На широте места, где прибор изготовляется, гирополукомпас балансиру-
ется таким образом, чтобы не было видимого ухода гироскопа, т.е. на гироскоп
при помощи искусственного небаланса накладывается момент:
Момент, накладываемый двигателем азимутальной коррекции, создается
за счет подачи на его управляющую обмотку напряжения, изменяющегося в за-
висимости от изменения широты места.
В комплект гирополукомпаса ГПК-52 входят следующие агрегаты:
а) датчик гирополукомпаса;
б) пульт управления;
в) соединительная коробка;
г) два указателя ПДК-49.
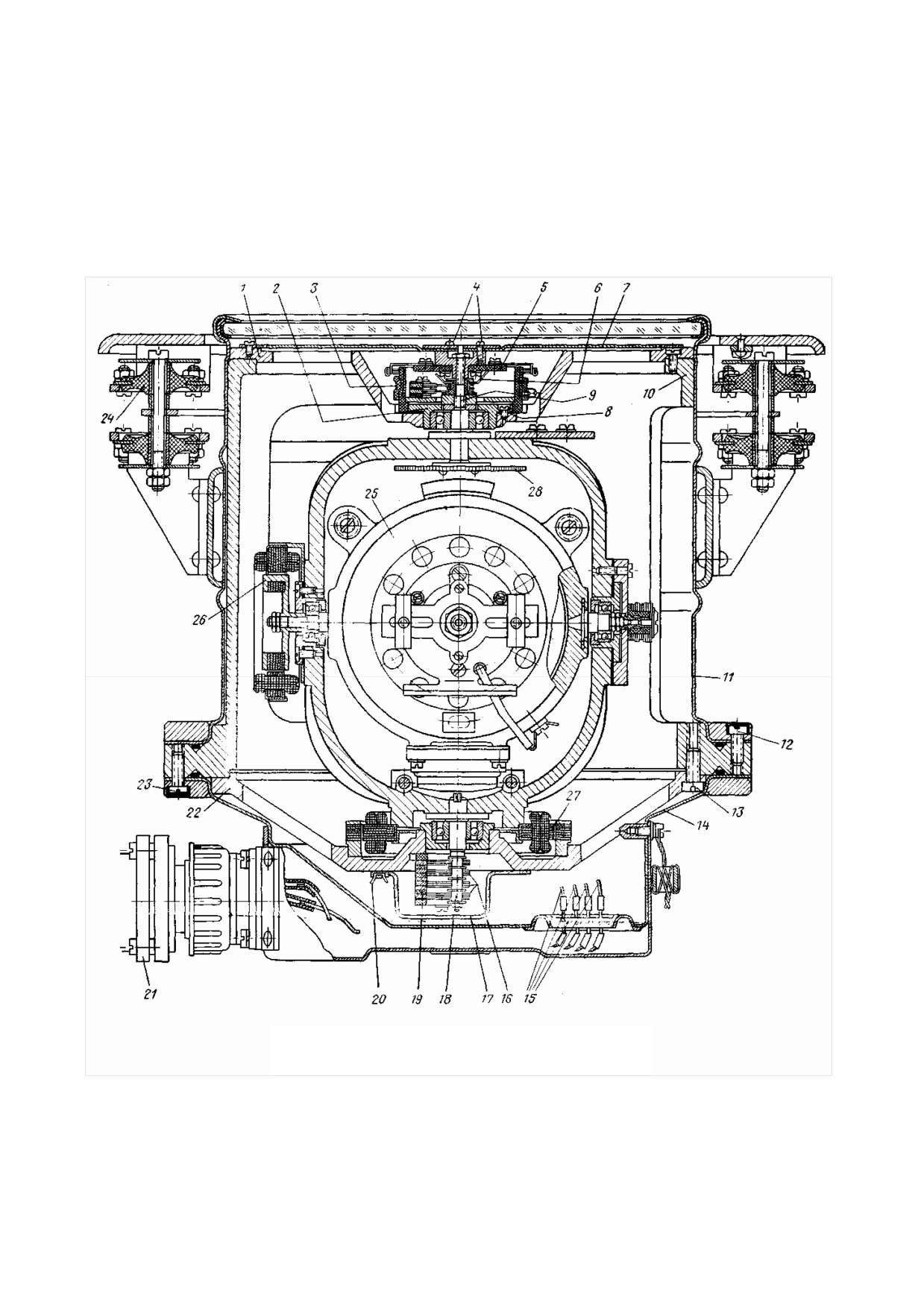
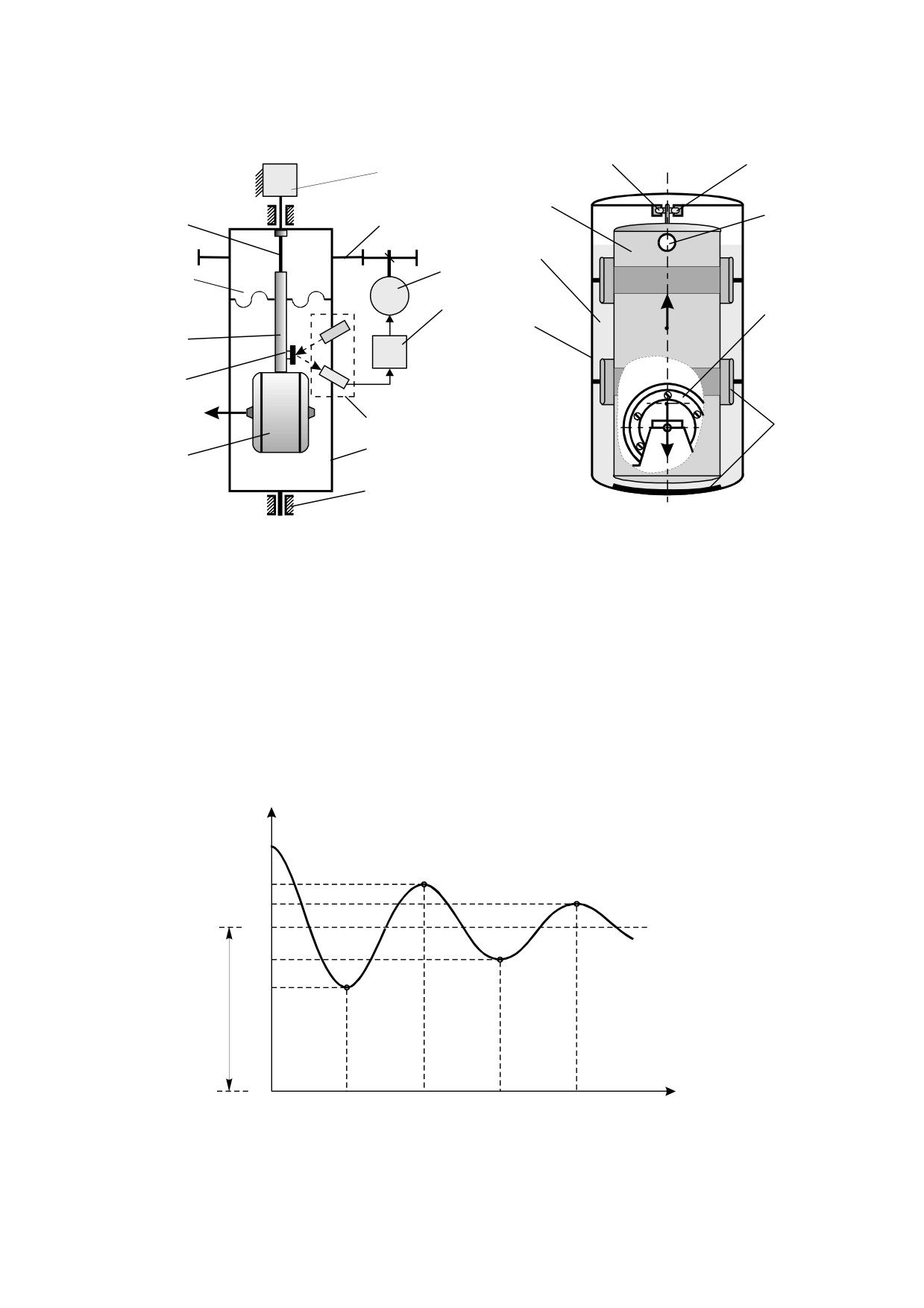
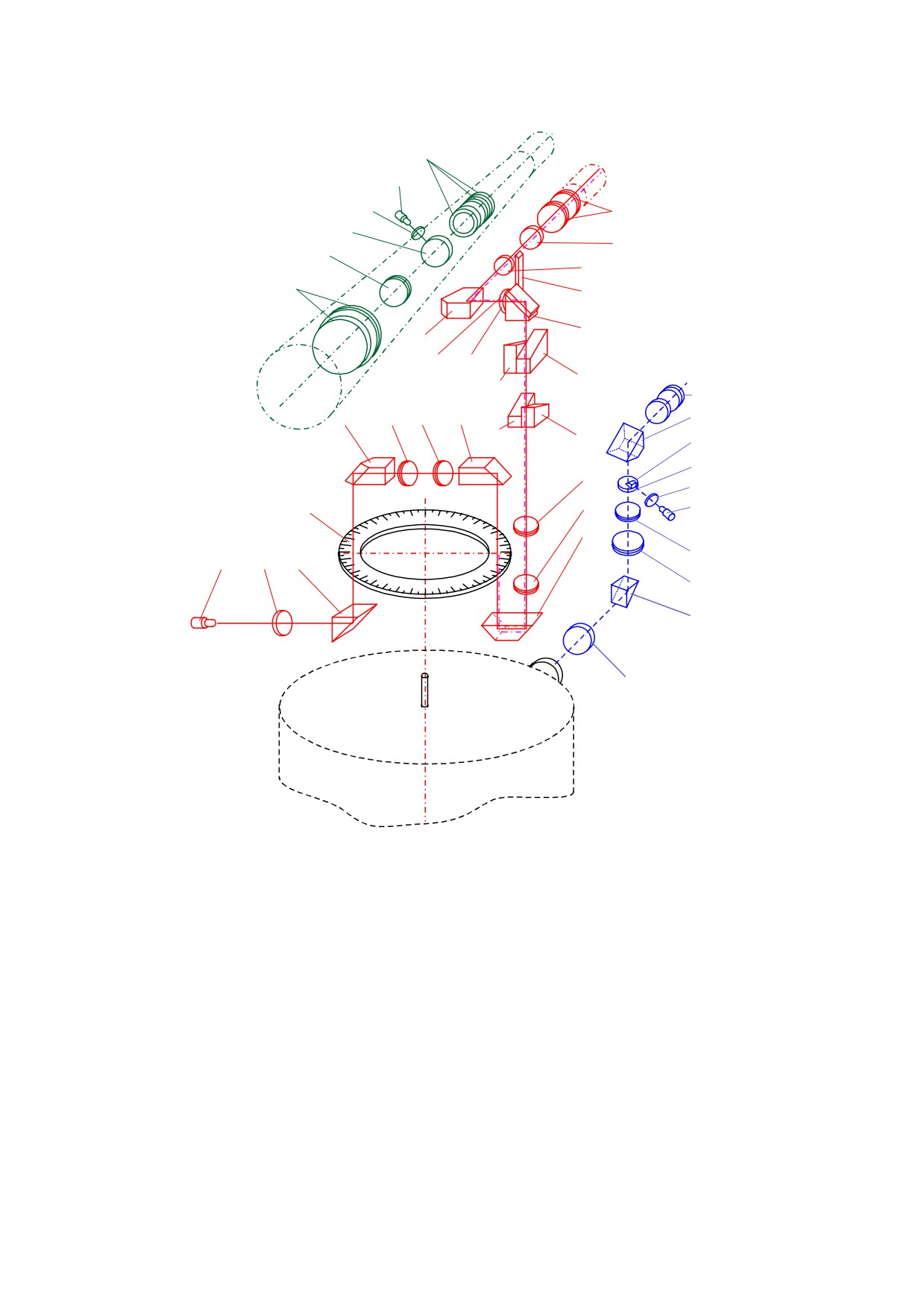
Схема построения датчика ГПК-52 представлена на рис. 4. В корпусе дат-
чика размещаются все основные механизмы: гироузел, элементы горизонталь-
ной коррекции, двигатель азимутальной коррекции, механизм поворота шкалы
гироскопического курса, шкалу с датчиком-потенциометром для выдачи сигна-
ла "курс" на указатели и другие потребители.
Основой гироузла является гиромотор ГУА-25000, представляющий со-
бой трехфазный электродвигатель с двумя короткозамкнутыми обмотками ста-
тора, выполненный по обращенной схеме. Ротор гиромотора симметричен в
геометрическом и тепловом отношении, что позволяет существенно уменьшить
влияние изменения температуры на положение его центра масс. Гиромотор по-
мещен в кожухе 5, являющемся внутренней рамкой гироскопа.
К нижней части корпуса гиромотора крепится жидкостный маятниковый
переключатель (ЖМП) 8, являющийся чувствительным элементом горизон-
тальной коррекции.
Кожух подвешен в подшипниках наружной рамки гироузла. Одна из по-
луосей кожуха гиромотора связана с ротором электродвигателя 7 азимутальной
коррекции. Статор 6 связан с внешней рамкой. Нижняя полуось 12 наружной
рамки связана с ротором 10 электродвигателя горизонтальной коррекции. На
этой же полуоси располагается семикольцевой коллектор 13 для подачи элек-
трического питания на наружную рамку и съема сигналов курса.
Верхняя вертикальная полуось 3 наружной рамки полая, внутри нее про-
ходит втулка, на которой крепятся шкала 21 гироскопического курса и щетки
9

22, скользящие по потенциометру 1, который жестко связан с корпусом прибо-
ра. Нижняя часть втулки шестеренчатой передачей 16 связана с валом электро-
двигателя ДИД-05 19 механизма поворота шкалы гироскопического курса.
Чувствительным элементом
4
горизонтальной коррекции явля-
ется ЖМП, который включен в
5
цепь управляющей обмотки дви-
гателя горизонтальной коррек-
ции.
6
Механизм установки гиро-
скопического курса служит для
установки в полете любого его
7
значения. Для этого шкала курса
8
21 поворачивается с помощью
9
электродвигателя
19, Одновре-
3
менно поворачиваются относи-
тельно потенциометра - датчика 1
и щетки 22, соединенные с об-
мотками указателей. Для уста-
новки истинного курса исполь-
зуются показания каких-либо
10
курсовых приборов, находящихся
2
на самолете.
11
В указателе ортодромии осо-
1
12
бенно важно свести до минимума
Рис. 4 Схема построения ГПК 52
вредные моменты трения и неба-
ланса по оси вращения кожуха ги-
роскопа, так как эти моменты вызывают уход ГПК в азимуте, Для уменьшения мо-
мента трения токоподвод к гиродвигателю и жидкостному переключателю осуще-
ствляется через безмоментные контакты 18 (точечные токоподводы).
С целью уменьшения момента небаланса относительно оси кожуха необ-
ходимо обеспечить минимальный сдвиг центра тяжести ротора и кожуха по оси
ротора при различных условиях работы прибора. Для этого в конструкции ги-
роузла ГПК-52 введен ряд усовершенствований:
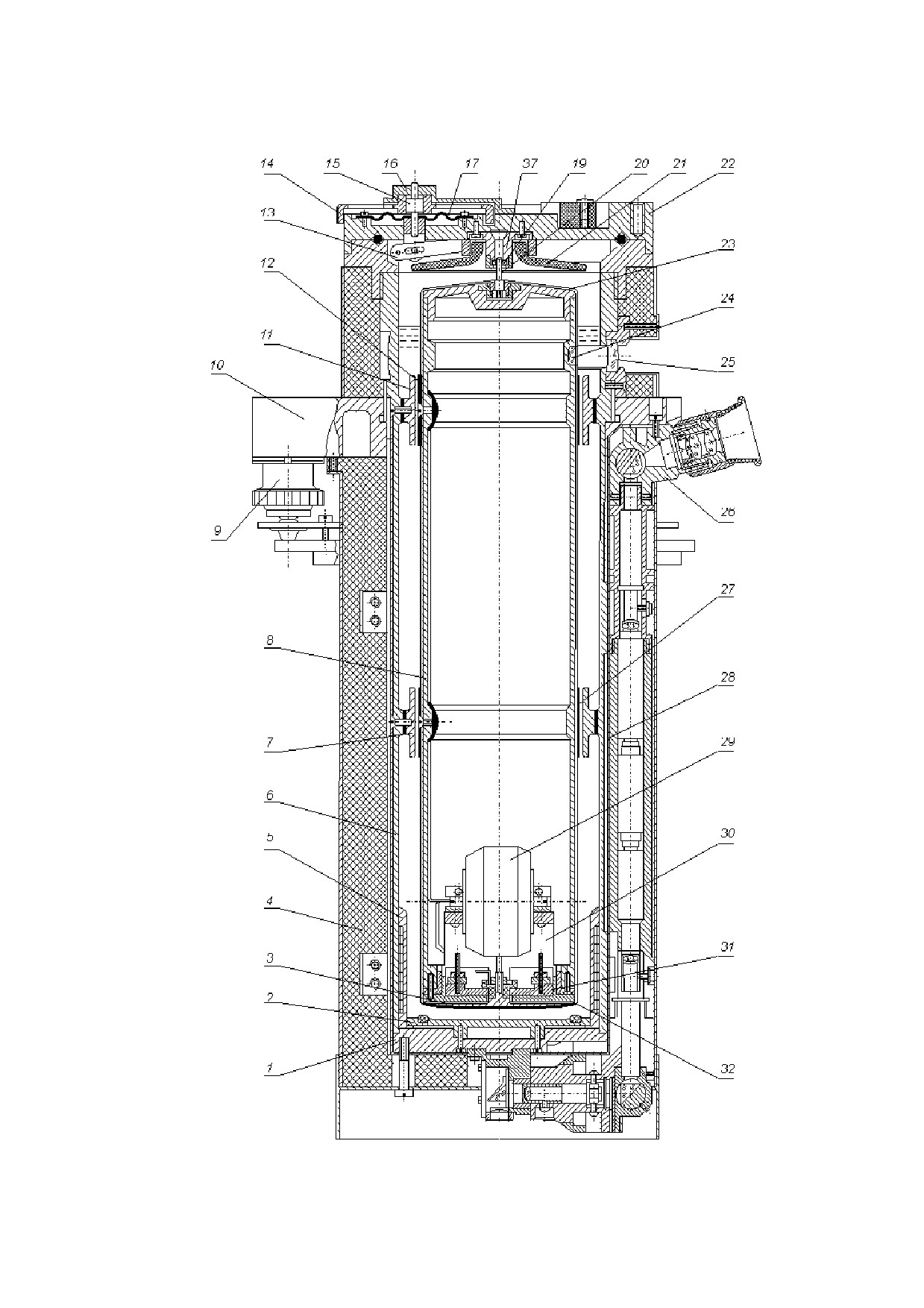
а) ротор 7 гироскопа (рис. 5) симметричен относительно его экваториаль-
ной плоскости (АВ). Ротор приводится во вращение двумя идентичными, сим-
метрично расположенными асинхронными двигателями. Такая конструкция по-
зволяет свести до минимума смещения центра тяжести электродвигателя при
изменении температуры;
б) при измерении температуры окружающей среды от +50°С до -60°С, не-
смотря на симметричную конструкцию гиродвигателя, возможно смещение его
центра тяжести относительно оси кожуха. Для уничтожения небаланса приме-
няется весовая биметаллическая термокомпенсация. К кожуху крепится биме-
таллическая пластина 2 с двумя грузами 23 (рис. 5). При изменении температу-
ры пластина прогибается, изменяется расстояние грузов от оси вращении кожу-
10
ха, что приведет к появлению искусственного небаланса. При температурной
регулировке прибора изменением расстояния грузов от центра пластины доби-
ваются полной балансировки гироузла.
Кроме того, прибор заключен в круглый кожух, что исключает неста-
бильность ухода гироскопа на разных румбах, вследствие влияния воздушных
струй, выходящих из окон кожуха гиромотора. На рис. 5 представлен разрез
датчика ГПК-52.
Рис. 5. Конструкция датчика ГПК-52
На рис. 6 представлена принципиальная электрическая схема ГПК-52.
Комплект ГПК-52 питается переменным током 36в, 400 гц и постоянным
током 28в. Переменный ток подается: на два статора гиромотора М1, обмотки
возбуждения и управления двигателей горизонтальной М4 и азимутальной М3
11
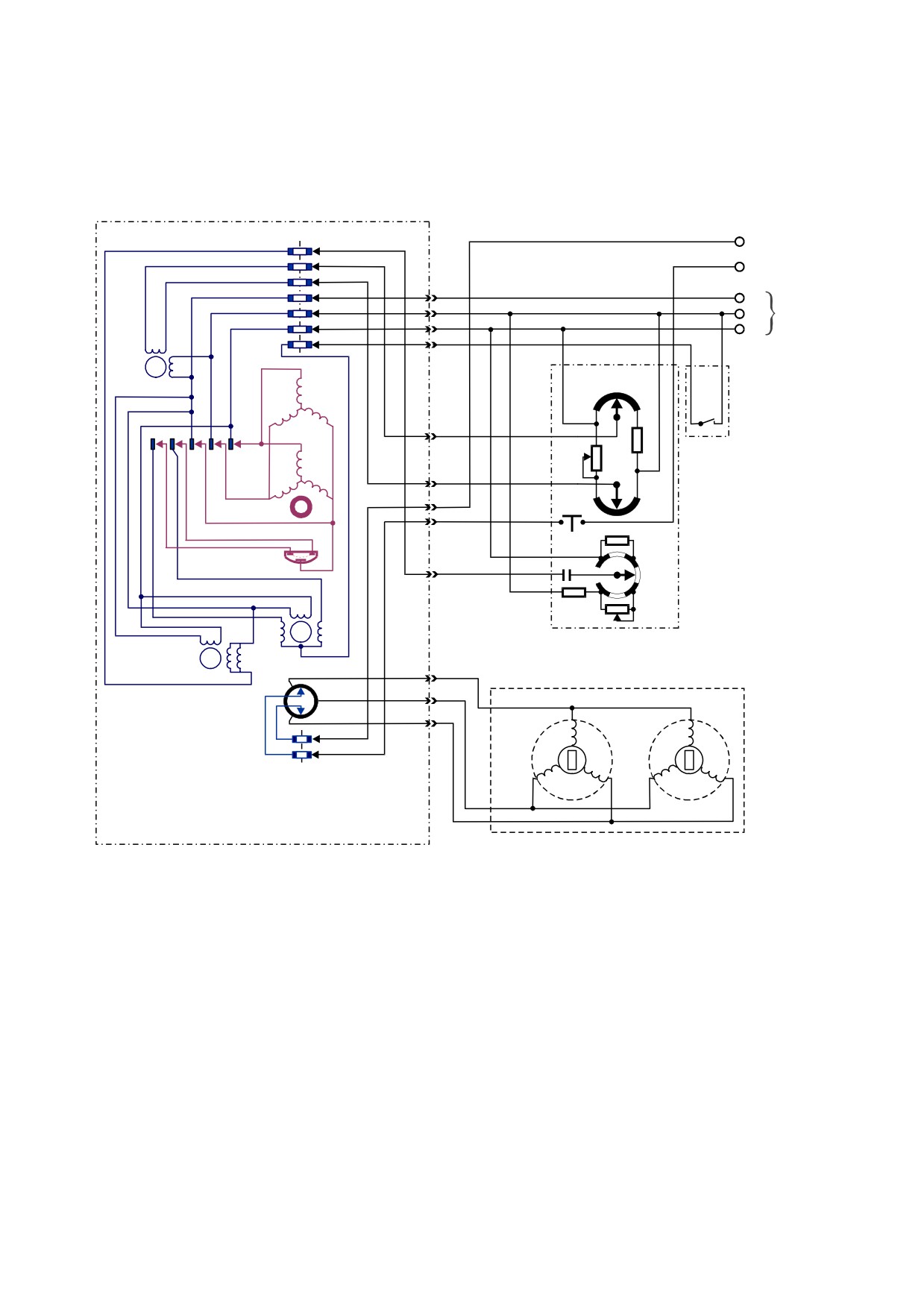
коррекции и двигателя М5 отработки шкалы, на жидкостный маятниковый пе-
реключатель М2. Кроме того, этот ток подается на широтный П2, П3 и попра-
вочный R2 потенциометры, на задатчик К2 разворота шкалы, расположенные в
пульте управления ПУ, Постоянный ток передается через переключатель К1 на
потенциометрический датчик П1 курса.
Гироагрегат
ТП2
-28В
+28В
А
36 В
Б
400 Гц
В
М3
ПУ
ВК
П2
М1
К3
ТП1
R2
R1
K1
П3
R3
3
1
М2
C
К2
2
R4
4
R5
М4
М5
П1
УК
ТП3
Рис. 6. Схема электрическая ГПК-52
Двигатель М4 горизонтальной коррекции представляет собой двухфаз-
ный реверсивный электродвигатель, работающий в заторможенном режиме.
Управляющая обмотка расщеплена на две половины. Последовательно к каж-
дой половине управляющей обмотки включены сопротивления плеч жидкост-
ного маятникового переключателя М2 (ЖМП), в котором используется одна
пара контактов, расположенных параллельно главной оси ротора, Электриче-
ское подсоединение половин обмоток двигателя выполнено так, что токи, про-
текающие по ним, создают взаимно противоположные моменты. При горизон-
тальном расположении оси ротора задействованная пара контактов переключа-
теля перекрыта токоподводящей жидкостью симметрично; сопротивление плеч
одинаково; моменты, создаваемые этими точками, по величине равны, а по на-
правлению противоположны; результирующий момент двигателя горизонталь-
ной коррекции равен нулю.
12
При отклонении оси ротора гироскопа от горизонтального положения сопро-
тивления плеч переключателя ЖМП неодинаковы; токи половин обмотки по
величине различны; под действием результирующего момента коррекционного
двигателя ось ротора будет прецессировать к горизонтальному положению. Фа-
за В подается на управляющую обмотку коррекционного двигателя через кон-
такты К3 выключателя коррекции ВК-53РБ. При развороте самолета контакты
К3 разрывают цепь управляющей обмотки коррекционного двигателя. Это сде-
лано с целью устранения виражных погрешностей ГПК-52.
Двигатель М3 азимутальной коррекции, как я двигатель горизонтальной кор-
рекции, тоже представляет собой асинхронный двухфазный двигатель, но с не-
расщепленной управляющей обмоткой (УО). Напряжение на управляющую об-
мотку снимается с мостовой схемы, смонтированной в пульте управления (ПУ)
и состоящей из сопротивлений R1, R2, П2 и П3.
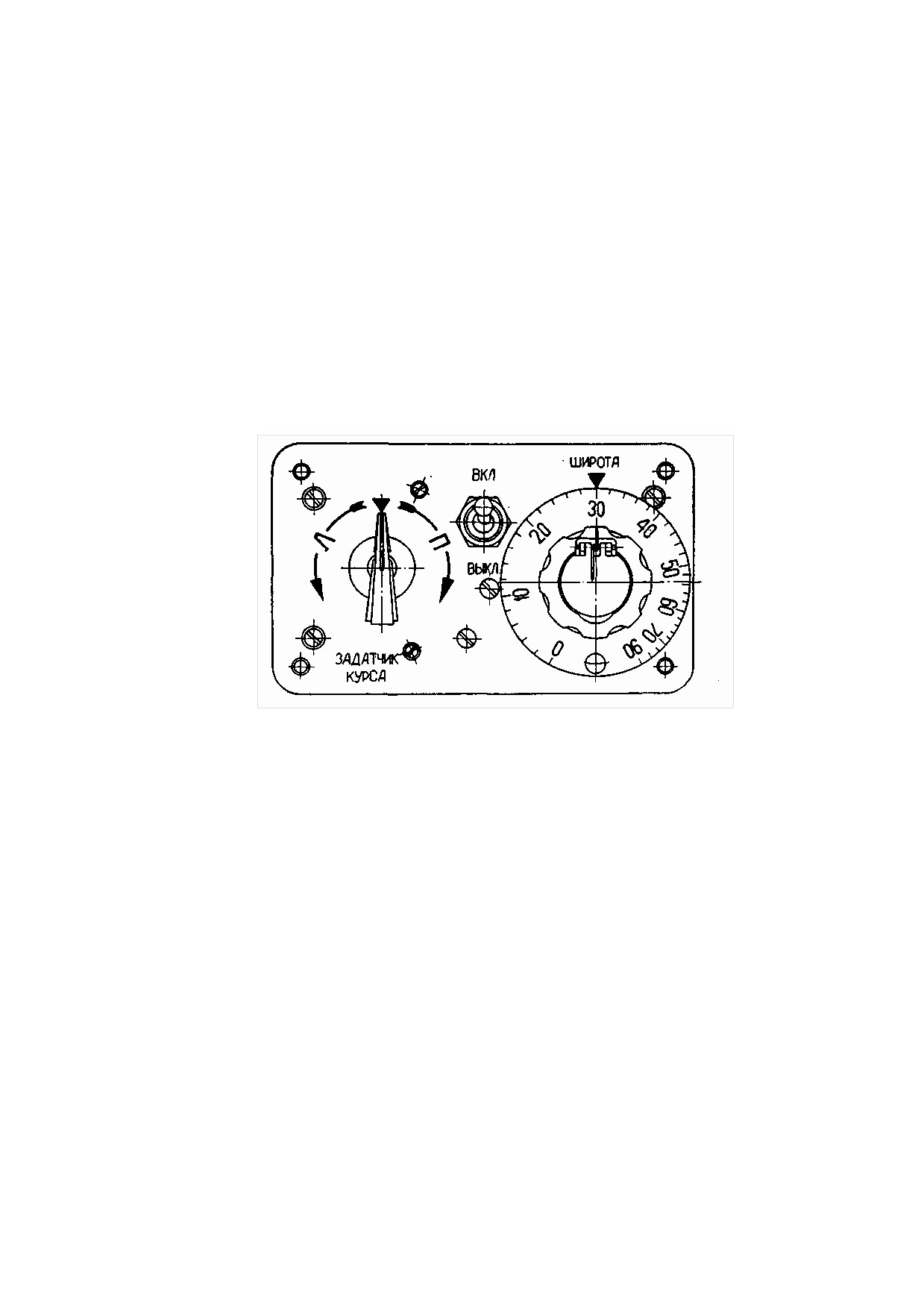
Рис. 7. Пульт управления
Ручка поворотов движков имеет нелинейную шкалу (рис. 8), проградуи-
рованную от 0 до 90° широты. На корпусе пульта управления имеется индекс
«широта». По шкале и индексу отсчитывается установленная широта. Градуи-
ровка шкалы выполнена таким образом, что напряжение, снимаемое с моста на
управляющую обмотку коррекционного двигателя, обеспечивая необходимую
синусоидальную зависимость коррекционного момента от широты. С помощью
потенциометра R2 вводится дополнительный электрический дебаланс моста с
целью компенсации механического дебаланса гироузла относительно оси внут-
ренней рамки, который может появиться в процессе эксплуатация прибора.
Для разворота шкалы прибора и щеток потенциометрического датчика
курса применен двигатель М5 ДИД-О5 (рис.6). Один конец управляющей об-
мотки УО подключен к фазе А, а второй, в зависимости от положения контакта
19, к фазам Б или В. Подключение к той или иной фазе осуществляет реверс
двигателя. Контакт К2 поворачивается ручкой 1 задатчика курса (рис. 8). Кон-
денсатор С1 (рис. 6) создает необходимый фазовый сдвиг (90°) между токами
основной и управляющей обмоток. Для обеспечения малой скорости поворота
шкалы при небольших поворотах ручки задатчика курса в цепь обмотки управ-
ления двигателя подключаются балластные сопротивления R3 и R5. При пово-
13

роте ручки на угол более 30° эти сопротивления закорачиваются, что приводит
к увеличению скорости разворота шкалы.
Основные технические характеристики ГПК-52
4 Описание лабораторной установки для проверки ГПК-52
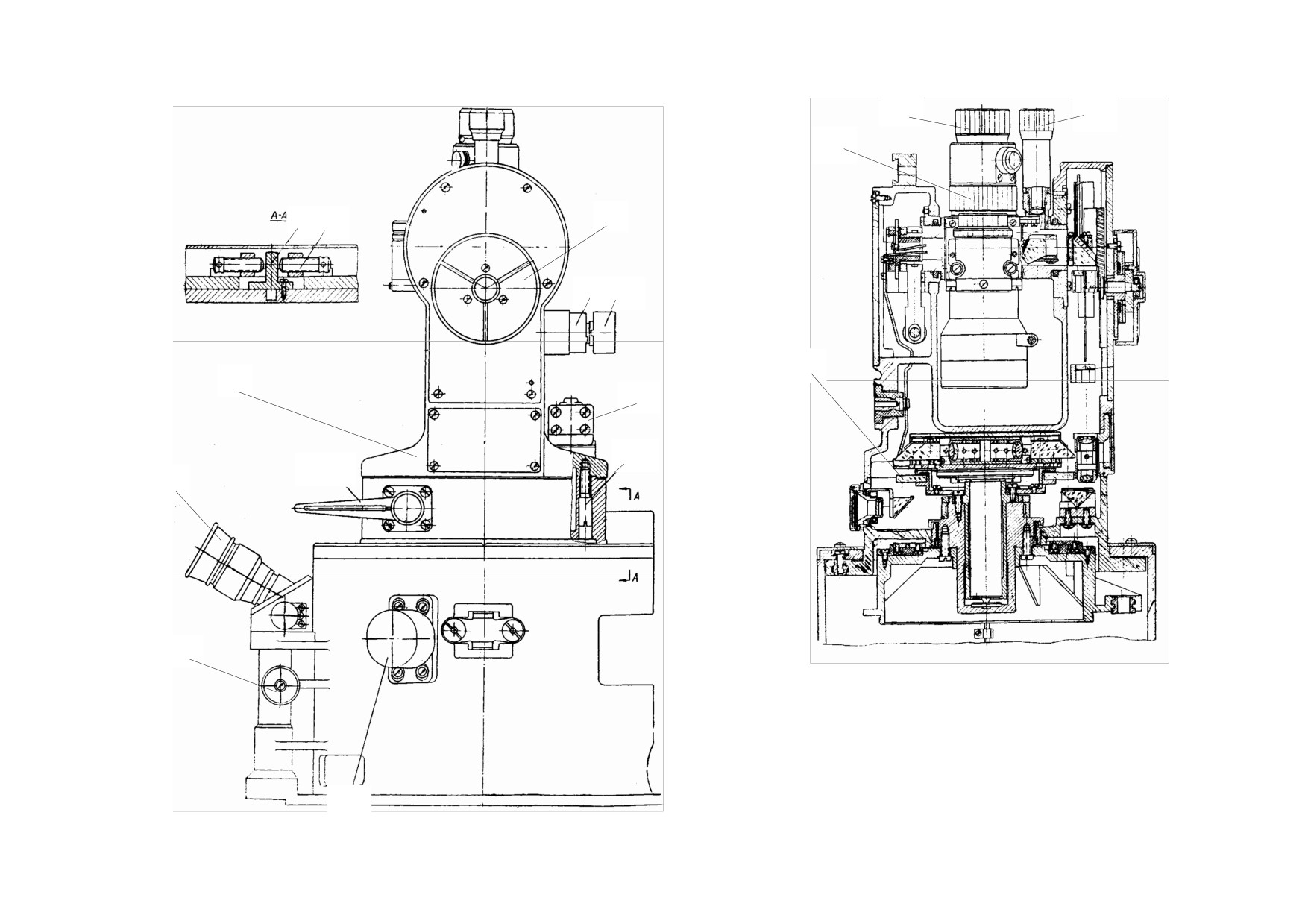
Лабораторная установка (рис. 8) состоит из двух частей.
5
8
4
9
3
6
7
2
10
1
Рис. 8. Внешний вид лабораторной установки
Датчик гирополукомпаса ГПК-52 5 и выключатель коррекции ВК-53РБ 4
установлены на вращающемся основании 3. На щите 1 располагается показы-
вающий прибор 6 ПДК-49, пульт управления 2, соединительная коробка, тумб-
леры включения питания и управления движением основания, шнур для под-
ключения вольтметра 7.
Гирополукомпас ГПК-48 8 установлен на кронштейне 9, позволяющем
задавать требуемые углы крена и тангажа. Кронштейн смонтирован на пово-
ротном столе МПУ-1 10.
14
5 Порядок проведения работы
5.1 Проверка комплекта гирополукомпаса ГПК-52
Порядок выполнения проверки.
1. Ознакомиться с лабораторной установкой.
2. Включить питание 36В 400Гц, 28 В постоянного тока и переменное на-
пряжение 220 В и дождаться, когда шкала датчика займет устойчивое положе-
ние. Время разгона гиромотора равно 2,5-3,5 минутам.
3. Подсоединить к шнуру вольтметр переменного напряжения. Поворачи-
вая ручку установки широты от 0° до 90° (через 10°) снять зависимость напря-
жения, подаваемого на азимутальный коррекционный двигатель, от широты.
4. Поворачивая ручку задатчика курса и используя секундомер, опреде-
лить максимальную и минимальную скорости разворота шкалы прибора (влево
и вправо).
5. Определить время выключения горизонтальной коррекции при враще-
нии основания в разные стороны.
5.2 Исследование виражных погрешностей ГПК-48 на вращающемся ос-
новании
1. Установить ГПК-48 в кронштейне установки МПУ-1 так, чтобы ось на-
ружной рамки прибора была вертикальна.
2. Заарретировать прибор и вращением ручки арретира прибора добиться
одинаковых показаний шкалы прибора и лимба установки МПУ-1.
3. Включить питание и после разгона гиромотора разарретировать при-
бор.
4. Включить на 3 минуты поворотную установку с угловой скоростью
вращения 15°/с. После остановки МПУ-1 найти разницу показаний шкалы при-
бора и лимба установки.
5. Определить уход ГПК-48 в условиях виража объекта, для чего задавать
вращение прибора о той же угловой скоростью (15 °/сек) и углами крена 20° и
45°. Спустя 3 мин в каждом случае привести ГПК-48 в горизонтальное положе-
ние и сиять разницу показаний прибора и установки.
5.3 Исследование кардановых погрешностей гироскопа направления.
1. Заарретировать прибор и вращением ручки арретира прибора добиться
нулевого показания шкалы прибора. Зафиксировать показания лимба установки
МПУ-1.
2. Задать угол крена прибора (величина указана в индивидуальном зада-
нии) и разарретировать прибор.
3. Поворачивая вручную платформу поворотной установки на фиксиро-
ванные углы в пределах одного оборота, снять зависимость показаний прибора
от угла поворота платформы.
4. Вычислить величину кардановой погрешности и построить график
этой погрешности. Сравнить полученные результаты с рассчитанной креновой
ошибкой.
15
6 Содержание отчета
В отчете должны быть представлены результаты экспериментального ис-
следования гирополукомпаса ГПК-48 в виде графиков и таблиц погрешностей,
а также данные о скоростях отработки шкалы ГПК-52 и график зависимости
напряжения, подаваемого на датчик момента азимутальной коррекции ГПК-52,
от широты.
7 Контрольные вопросы
1. Чем отличается ГПК-52 от ГПК-48?
2. Почему ГПК-52 называют указателем ортодромии? Оцените величину
методической погрешности измерения курса при движении основания на вос-
ток с постоянной скоростью.
3. Перечислить источники инструментальных погрешностей в показаниях
гирополукомпасов и способ компенсации температурной погрешности, приме-
няемые в приборе ГПК-52.
4. Как уменьшается влияние моментов трения по оси внутренней рамки
на погрешности ГПК-52.
5. Указать способы азимутальной коррекции гирополукомпасов.
6. Почему исследование виражных погрешностей в лабораторных усло-
виях проводится с использованием прибора ГПК-48.
7. Как влияют моменты трения вокруг вертикальной оси подвеса на пове-
дение гироскопов направления?
8. Как производится компенсация систематической составляющей ухода
гироскопа ГПК-52.
9. Какие типы токоподводов используются на внутренних и наружных
осях подвеса?
10.Поясните работу механизма задержки проворота наружного карданного
кольца при сложении рамок.
11.Для чего и как производится изменение скорости установки гироско-
пического курса?
12.Используя чертеж датчика ГПК-52 (рис. 5) и макет прибора, пояснить
конструкцию и принцип работы одного из узлов прибора (по указанию препо-
давателя).
8 Литература
1. Одинцов А.А. Теория и расчет гироскопических приборов. - Киев.:
Вища школа, 1985, 392 с.
2. Бондарь П.М. Конспект лекций по дисциплине «Измерительные преоб-
разователи, приборы и системы».
3. Федоров В.Н. Методические указания к выполнению лабораторных ра-
бот по курсу "Теория и расчет гироскопических приборов", раздел "Приборы
курса". - К.: КПИ, 1986. - 52с.
16
Лабораторная работа №2
ГИРОМАГНИТНЫЕ КОМПАСЫ
1 Цель работы
Целью работы является изучение принципа действия гиромагнитных
компасов, схемы и конструкции катерного варианта гиромагнитного компаса
ДКГМК-3, а также проверка прибора ДКГМК-3.
2 Оборудование, измерительные приборы, инструменты
При выполнении работы используются действующий прибор ДКГМК-3,
лабораторная установка для проверки ДКГМК-3, гироагрегат изучаемого при-
бора со снятыми кожухами, разрез магнитного датчика ПДК-45, секундомер и
постоянный магнит.
3 Содержание работы
Работа состоит в изучении особенностей конструкции катерного гиро-
магнитного компаса, в ознакомлении с работой прибора и оценке влияния сил
сухого трения в подвесе чувствительного элемента датчика магнитного курса.
3.1 Общие сведения
На малых морских кораблях и малых судах (катерах) магнитный компас
используется либо в качестве основного и единственного курсоуказателя, либо
в качестве резервного прибора курса; если на катере имеется гироскопический
компас. Приборы магнитного курса (магнитные и индукционные компасы) с
подвижной системой, вращающейся вокруг вертикальной оси и (или) ориенти-
рующейся в плоскости горизонта, имеют существенные недостатки: показания
их неустойчивы при наличии ускорений, качки и вибраций объекта.
Условия работы магнитного компаса на катерах весьма неблагоприятны. С од-
ной стороны, велики искажения магнитного поля Земли в месте установки ком-
паса, ферромагнитными массами катера, т.е. велики магнитные девиации
вследствие малого удаления двигателя и других узлов конструкции со сталь-
ными деталями. С другой стороны, катера в большей степени, чем крупные су-
да, подвержены влиянию волн. Вследствие относительно малой массы катер
при большой скорости хода подвергается тормозящему действию волн. Удары
волн вызывают резкие сотрясения корпуса и изменения скорости хода, а также
резкие угловые перемещения.
Под влиянием динамических перегрузок, вызванных переменными уско-
рениями, картушка магнитного компаса совершает колебательные движения,
что затрудняет отсчет показания. Наклоны картушки относительно плоскости
горизонта вызывают кроме того изменение ее положения равновесия в азимуте
17
вследствие влияния вертикальной составляющей магнитного поля Земли. По-
этому колебания картушки относительно плоскости горизонта приводят к ее
"рысканию" в азимуте, т.е. к прямым погрешностям определения курса.
Указанные трудности использования магнитного компаса на малых судах
существенно уменьшается в случае применения дистанционного гиромагнитно-
го компаса (ДГМК). В таком приборе магнитный компас может быть размещен
в месте, где магнитные девиации минимальны. А комплексирование магнитно-
го компаса с трехстепенным гироскопом позволяет сгладить показания магнит-
ного компаса, т.е. уменьшить колебательную составляющую погрешности.
Таким образом, в гиромагнитных компасах сочетаются положительные
свойства магнитного компаса (наличие "направляющего момента") и гироскопа
направления (устойчивость оси ротора при эволюциях и колебаниях основания).
ДГМК представляет собой гироскоп направления (ГН) с замкнутой сис-
темой азимутальной коррекции, в котором текущее положение главной оси ги-
роскопа сравнивается с направлением на магнитный север.
На практике используют два вида азимутальной коррекции - моментную
и кинематическую.
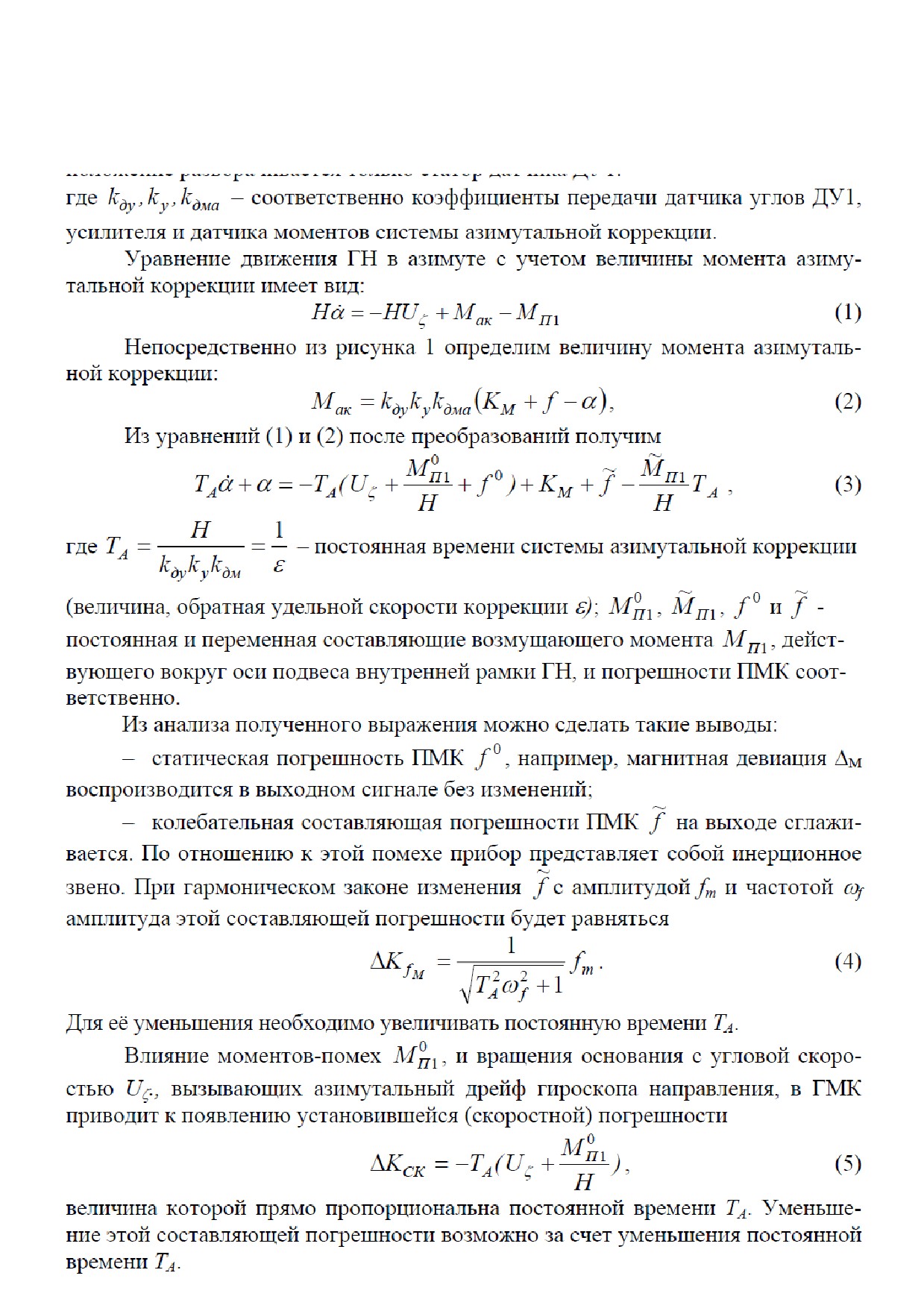
UC
КМ+f
α
КМ+f
α
ПМК
ПМК
α=КПР
α=КПР
Г
Г
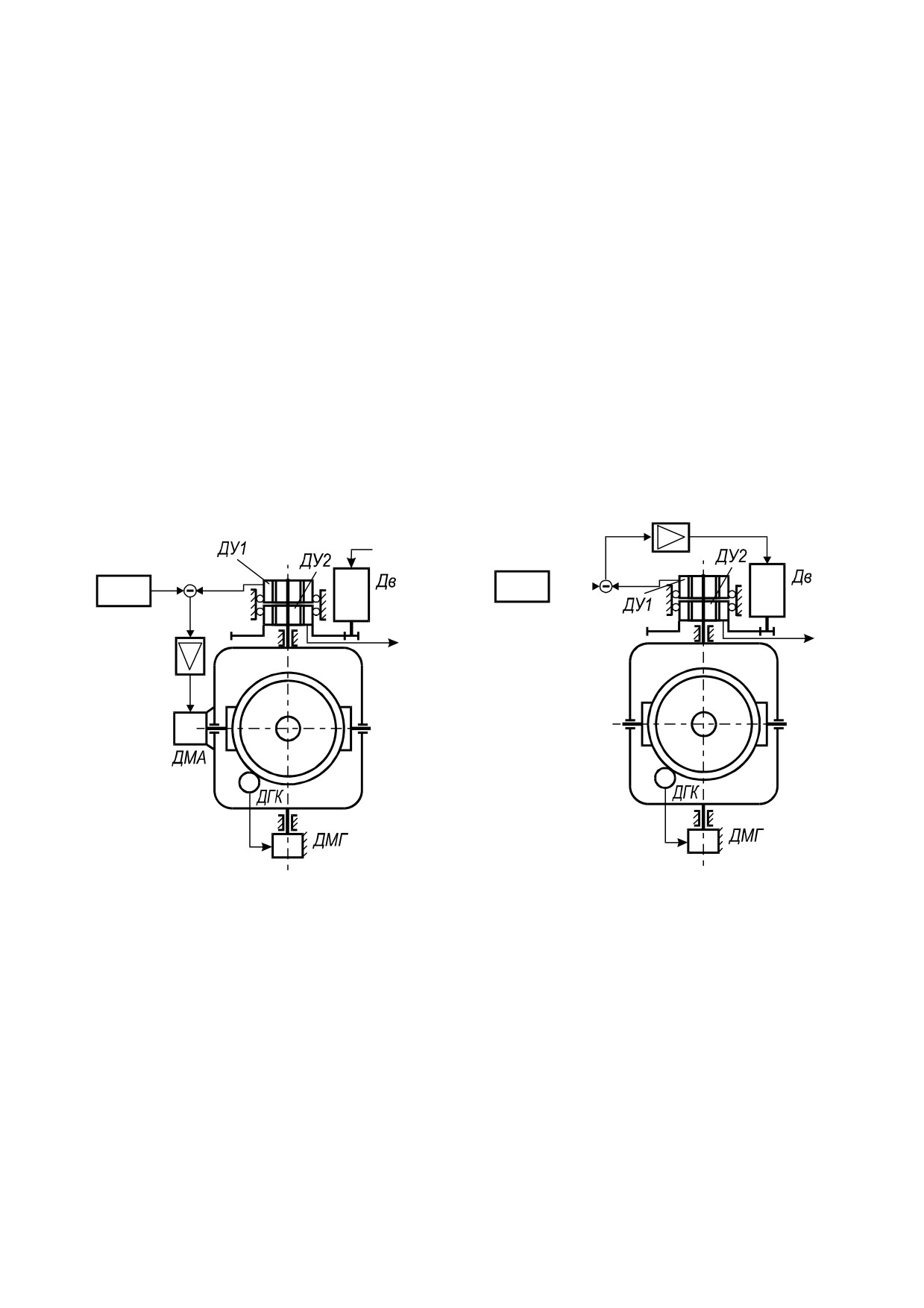
Рис. 2. Гиромагнитный компас с
Рис. 1. Гиромагнитный компас с
азимутальной кинематической
азимутальной моментной
коррекцией
коррекцией
Система азимутальной моментной коррекции прибора (рис. 1) построена
на основе сравнения сигналов K
f
прибора магнитного курса (ПМК) и
М +
приборного значения курса
K
, снимаемого с датчика углов ДУ1, установлен-
пр
ного на внешней оси ГН. Сигнал разности показаний через усилитель подается
на датчик моментов, установленный на оси внутренней рамки ГН. Под дейст-
вием коррекционного момента прецессионное движение ГН в азимуте будет
проходить до тех пор, пока сигналы ПМК и ДУ1 не сравняются.
В системе азимутальной кинематической коррекции (рис. 2) сигнал раз-
ности показаний через усилитель подается на двигатель Дв, кинематически свя-
занный со статором датчика угла при помощи редуктора. Двигатель разворачи-
18
вает статор датчика угла до тех пор, пока сигналы ПМК и ДУ1 не сравняются.
Таким образом, ГН остается азимутально свободным: в согласованное
положение разворачивается только статор датчика ДУ1.
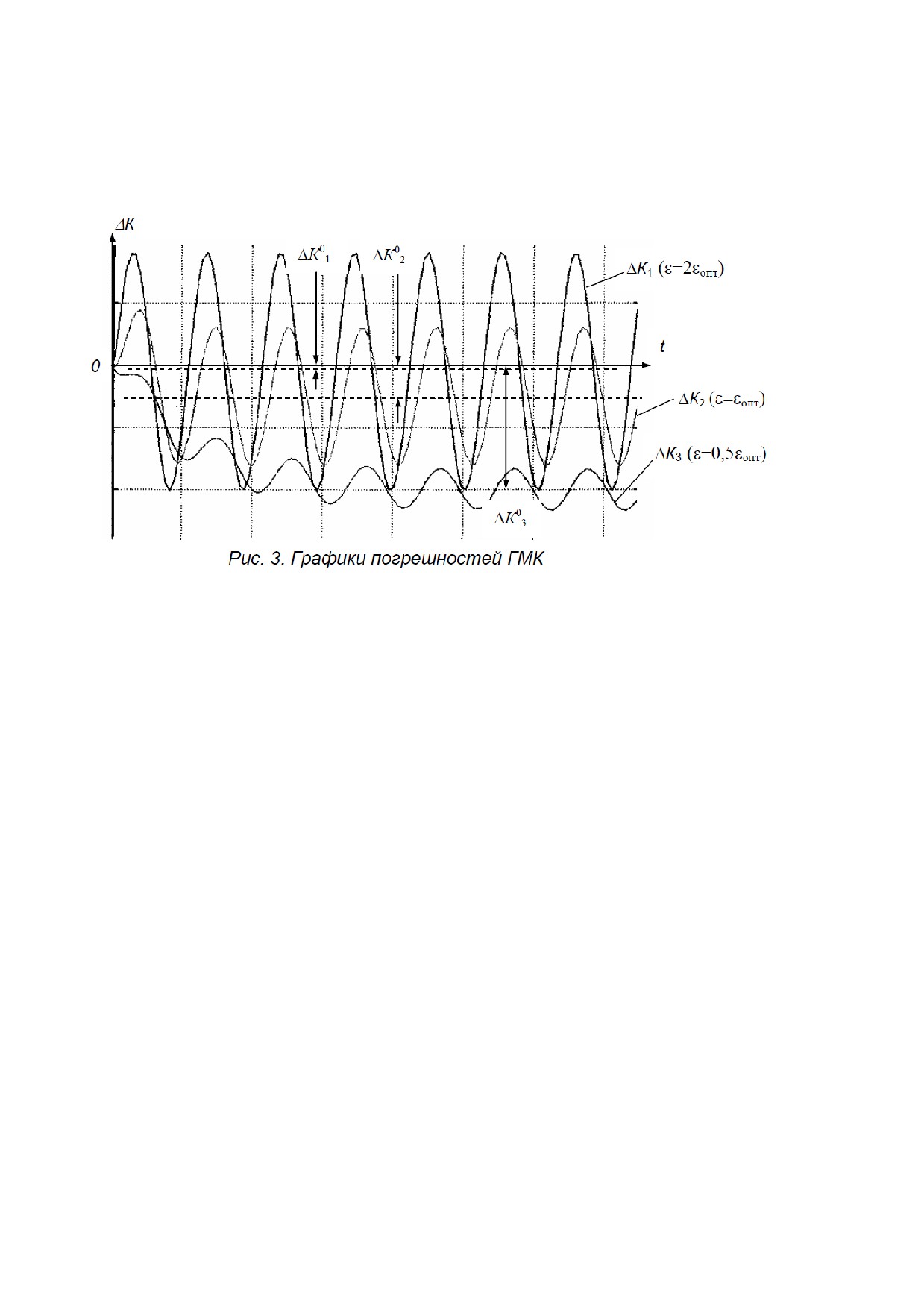
Очевидно, что существует оптимальное значение постоянной времени ТА,
при котором суммарная погрешность измерения курса будет минимальной.
Это значение определяют посредством анализа характера движения осно-
вания, на котором установлен измеритель курса.
На рис. 3. показан характер изменения постоянной и колебательной со-
ставляющих погрешностей ГМК в зависимости от величины постоянной вре-
мени системы азимутальной коррекции.
Аналогичные выводы можно сделать, проанализировав поведение ГМК с
кинематической азимутальной коррекцией.
3.2 Гиромагнитный компас ДГМК-3
3.2.1 Функциональная схема гиромагнитного компаса
Дистанционный катерный гиромагнитный компас ДКГМК-3 представляет
собой авиационный дистанционный гиромагнитный компас ДГМК-3, приспо-
собленный для использования в условиях катера.
Рассматриваемый катерный прибор, как и его прототип - авиационный прибор
ДГМК-3 - содержит следующие основные узлы: дистанционный магнитный
компас ПДК-3, гироскопический агрегат, усилитель, указатели курса (репите-
ры), соединительную коробку.
Главное отличие конструкции катерного прибора от его авиационного
прототипа заключается в том, что основные узлы помещены в дополнительные
корпуса и снабжены усиленной амортизацией крепления. Дополнительные кор-
пуса блоков обеспечивают влагозащищенность, достаточно большую жесткость
конструкции и прочность крепления, необходимую для корабельных условий.
Дополнительная амортизация основных блоков защищает их от интенсивных
ударов и вибраций, характерных для высокоскоростных катеров (например,
торпедных) при движении по возмущенной водной поверхности.
Электрическая связь и взаимодействие между этими узлами показано на рис 3.
20

В магнитном датчике ПДК-3 с картушкой 10, ориентированной по маг-
нитному меридиану с помощью магнитов 11, связаны две щетки 12. Потенцио-
метр 9 жестко связан с корпусом датчика ПДК-3. В гироагрегате потенциометр
2 связан с осью внешней рамки гирополукомпаса 1. Три щетки 3 через редуктор
5 и двигатель 6 связаны с корпусом гироагрегата. Три щетки 3 потенциометра 2
электрически соединены с тремя точками отпайки потенциометра 9 и статорной
обмоткой показывающего прибора 8. К двум диаметрально-противоположным
точкам потенциометра 2 подается постоянное напряжение U0. Напряжение с
двух щеток 12 магнитного датчика подается на вход усилителя 7. Усилитель
преобразует постоянное напряжение в переменное частотой 400 Гц и усиливает
его. Фаза выходного напряжения зависит от полярности входного напряжения.
Напряжение с выхода усилителя подается на управляющую обмотку двухфаз-
8
7
6
5
Ред2
Ред1
КМ
1
2
9
ПДК-3
4
ЭМ
A
3
12
U0
2
Г
S
10
N
N
11
1
Рис. 4. Функциональная схема ДГМК-3
ного индукционного двигателя 5. Двигатель через редуктор 6 связан со щетка-
ми 3 потенциометра 2. Система: "ПДК-3 - усилитель 7 - двигатель 5" служит
для компенсации азимутального ухода оси ротора ГН. При уходе гироскопа
"уходит" вместе с ним и потенциометр 2, в результате чего потенциометры 2 и
9 рассогласуются, а, следовательно, на усилитель 7 будет подаватьcя напряже-
ние рассогласования. Преобразованное и усиленное напряжение подается на
управляющую обмотку двигателя 5. Щетки 3 будут отрабатываться в сторону
азимутального ухода гироскопа (потенциометра 2). Таким образом, в ДГМК-3
реализована схема азимутальной кинематической коррекции.
Скорость отработки щеток не должна быть меньшей, чем скорость ухода
гироскопа, и выбирается равной 2-4 °/мин. При такой скорости происходит ос-
реднение, сглаживание колебаний выходного сигнала магнитного датчика, так
21
как щетки потенциометра 2 не успевают отрабатываться вслед за колебаниями
подвижной части ПДК-3.
Таким образом, при азимутальном уходе гироскопа положение щеток 3
относительно точек токоподводов потенциометра 2 остается неизменным при
постоянном курсе самолета.
Это положение соответствует взаимному согласованному расположению
точек отпайки потенциометра 9 и щеток 12 магнитного датчика. Поэтому, хотя
напряжение на показывающий прибор снимается с потенциометра грополуком-
паса: схема в общем будет определять магнитный (компасный) курс.
При эволюциях самолета картушка вместе со щетками 12 может уйти от
магнитного меридиана на значительный угол.
Потенциометры 2, 9 рассогласуются. Двигатель 5 будет разворачивать
щетки 3, стремясь увести их в сторону ухода картушки. При этом будет накап-
ливаться погрешность со скоростью 3-4 °/мин. Если продолжительность эво-
люции равна 1 мин,. то к ее концу ошибка схемы не превзойдет 3-4°, хотя кар-
тушка магнитного датчика в эта время может быть отклонена на любой угол
(0°+180°). Через некоторое время после эволюции самолета накопившаяся
ошибка, благодаря отработке щеток, будет опять ликвидирована. Электромаг-
нит 4 служит для быстрого согласования потенциометров 2 и 9 при запуске
прибора. При нажатии кнопки быстрого согласования срабатывает электромаг-
нит 5 и путем перестановки шестерни уменьшает передаточное число редукто-
ра 6; угловая скорость отработки щеток 3 становится равной 15°÷20°/сек.
3.2.2 Гироагрегат компаса ДГМК-3
Гироагрегат (рис. 6) компаса ДГМК-3 состоит из следующих основных
частей: корпуса, гироскопического узла, кольцевого потенциометра, щеток с
редуктором, электродвигателя ДИД-05 отработки щеток и электромагнита пе-
реключения скоростей согласования.
Гироскопический узел представляет собой гироскоп с тремя степенями
свободы и состоит из гиродвигателя с кожухом и внешней рамки. Гиродвига-
тель 1 представляет собой трехфазный асинхронный двигатель, питаемый пе-
ременным током напряжением З6в, частотой 400 гц. Ротор вращается снаружи
статора и на его торцевой поверхности расположены лопасти (рис. 5). При вер-
тикальном положении оси внешней рамки 3 ось вращения кожуха гиродвигате-
ля, т.е. ось внутренней рамки гироскопа расположена горизонтально. Для пре-
дотвращения совмещения оси ротора с осью внешней рамки гироскопа имеет
межрамочную горизонтальную коррекцию, при помощи которой ось вращения
ротора удерживается в положении, перпендикулярном плоскости наружной
рамки. Для этого на крышке кожуха имеются отверстия, через которые азот, за-
полняющий кожух гироагрегата, поступает в гиродвигатель и при вращении
ротора под действием центробежных сил выбрасывается двумя струйками из
сопел 2 кожуха в противоположные стороны.
При отклонении оси ротора от положения, перпендикулярного плоскости
наружной рамки, эти две струи азота создают момент вокруг оси внешней рам-
ки гироскопа. В результате действия момента возникает прецессия главной оси
22

гироскопа относительно оси внутренней рамки, возвращающая главную ось к
положению, перпендикулярному оси наружной рамки.
На наружной рамке закреплен кольцевой потенциометр 5, к двум диамет-
рально противоположным точкам которого подведено постоянное напряжение
бортовой сети 28В. По кольцевому потенциометру могут скользить три щетки
4, связанные с корпусом гироагрегата через редуктор 6 и отрабатывающий дви-
гатель 7.
5
6
4
3
7
2
8
1
11
10
6
9
Рис. 6. Конструкция гироагрегата
23
Редуктор 6 представляет собой набор шестерен и передает вращение ро-
тора двигателя отработки на щетки гироагрегата. При обычной скорости согла-
сования передаточное число от двигателя к щеткам равно
1:780000, что обес-
печивает вращение щеток со скоростью 3-4° в минуту.
Электромагнит 11 переключения скорости согласования при нажатии на
кнопку согласования подключается на постоянное напряжение бортовой сети
самолета 28В. При этом притягивается Г-образный якорь электромагнита 10 и
при помощи рычага 9 переставляет шестерни в редукторе, уменьшая его пере-
даточное число, соответствующее угловой скорости отработки щеток
17−20°/сек. На внешней рамке гироскопа установлено специальное тормозное
устройство, препятствующее быстрому вращению внешней рамки в тех случа-
ях, когда оси ротора и внешней рамки складываются.
Корпус гироагрегата герметичный и заполняется через специальный вы-
вод азотом, предотвращающим коррозию деталей гироагрегата и обеспечи-
вающим нормальную работу системы горизонтальной коррекции на любой вы-
соте полета.
3.2.3 Датчик магнитного курса ПДК-3
Магнитная система датчика представляет собой два магнита 6, укреплен-
ных на плоской картушке, состоящей из шкалы 5 и подшкальника 4 (рис. 7).
Рис. 7. Конструкция датчика ПДК-3
Картушка при помощи шарикового подшипника 10 свободно вращается
на оси 11, жестко укрепленной на нижней части подвески 3. На обойме 19 под-
шипника, жестко связанной с картушкой, укреплены две изоляционные втулки
со щетками 20, скользящими по потенциометру 7. Потенциометр 7 укреплен на
нижней части подвески 3. Щетки 20 электрически связаны с двумя кольцами 8
и 9, посаженными на ось картушки. В крышке корпуса 1 имеется смотровое ок-
но 24 для наблюдения за шкалой 5.
24

Подвеска 3 при помощи соединения 21 связана с кольцом 2. Последнее
при помощи пружин 14 закреплено в корпусе. Кроме пружин 14, для смягчения
взлетно-посадочных ударов установлены плоские фасонные бронзовые пружи-
ны 13 с резиновыми пластинками в верхней части. Ограничителем наклона кар-
тушки служит амортизация в виде пластин 22, спрессованных резиной.
Датчи-к заполнен азотом. На крышке корпуса помещен девиационный прибор
такого же типа, как на компасе А-4. Датчик имеет трехштырьковый и двух-
штырьковый штепсельные разъемы для соединения соответственно с гироагре-
гатом и через соединительную коробку с усилителем.
3.2.4 Усилитель компаса ДГМК-3
Усилитель компаса ДГМК-3 служит для преобразования постоянного на-
пряжения, снимаемого со щеток магнитного датчика, в переменное, частотой
400 Гц.
4 Программа и методика выполнения лабораторной работы
4.1. Изучение особенностей конструкции блоков прибора
4.1.1. Ознакомиться с лабораторной
3
установкой, смонтированной на трех пол-
ках стойки этажерочного типа (рис. 8). На
верхней полке установлен датчик магнит-
ного курса 3 (блок 1), на средней указатель
2 (блок 3) и выключатель 4 (блок 4), на
4
2
нижней - блок 2 (гироагрегат и преобразо-
ватель).
4.1.2. Изучить особенности конструк-
ции катерного варианта дистанционного
гиромагнитного компаса. Особое внимание
уделить устройству амортизаторов и сред-
ствам обеспечения влагозащищенности
прибора.
1
4.2. Ознакомление с работой прибора
4.2.1. Убедиться в подключении кабе-
ля питания прибора к лабораторному щитку, включить питание 27 В по-
стоянного тока.
4.2.2. Включить выключатель 3 прибора. О работе прибора будет свиде-
тельствовать шум преобразователя и разгоняющегося гироскопа.
4.2.3. Снять верхний кожух блока 1 и обеспечить доступ к датчику маг-
нитного курса.
4.2.4. Проверить работу системы быстрого согласования гироскопа с дат-
чиком магнитного курса. Для этого при нажатой кнопке «быстрое согласова-
ние» на репитере 2 поднести конец стержневого постоянного магнита к цилин-
дрической части корпуса датчика магнитного курса. Подносить магнит следует
к восточной или западной части корпуса (окна лаборатории обращены пример-
но на юг). По шкале репитера наблюдать отклонение картушки датчика маг-
25
нитного курса под влиянием искажения магнитного поля Земли, создаваемого
магнитом. После поворота шкалы репитера на 20 - 30° отпустить кнопку быст-
рого согласования и убрать магнит.
4.2.5. Определить скорость коррекции показаний гироскопа, наблюдая
изменение показаний по шкале репитера.
4.2.6. Определить ориентировочное значение скорости быстрого согласо-
вания.
4.3. Экспериментальное определение зоны застоя датчика магнитного
курса.
4.3.1. Отклонить с помощью магнита картушку датчика магнитного курса
от положения равновесия на угол 10 - 15° и убрать магнит. Выждать время, не-
обходимое для возвращения картушки в положение равновесия. Записать от-
счет пор шкале картушки, видной в окне датчика магнитного курса.
Отклонить с помощью магнита картушку в противоположную сторону на
угол 10 − 15°, убрать магнит и определить установившееся положение картуш-
ки. Повторить операции с отклонением картушки в обе стороны 3 - 4 раза и оп-
ределить зону застоя (наибольшую разность показаний после отклонений кар-
тушки в противоположные стороны).
4.3.2. Определить зону застоя картушки по методике, изложенной в п.
4.3.1., при вибрациях, создаваемых легким частым постукиванием резиновым
молоточком по корпусу датчика магнитного курса.
5 Содержание отчета.
В отчете привести следующие данные:
− Функциональную схему прибора;
− Значения скоростей азимутальной коррекции и быстрого согласования;
− Значения зоны застоя при отсутствии и наличии вибраций.
6 Контрольные вопросы
1. В чем заключаются основные достоинства комплексированной системы
курсоуказания по сравнению с ПМК и ГН?
2. Из каких соображений выбирается значение скорости азимутальной кор-
рекции ГН?
3. Для чего и когда используется режим быстрого согласования?
4. Какие виды азимутальной коррекции используются в гиромагнитных
компасах?
5. Почему в современных курсовых системах используют индукционные
датчики магнитного курса, а не магнитные компасы?
6. Почему ошибка от застоя магнитного датчика уменьшается при вибраци-
ях основания?
7. Как обеспечивается режим быстрого согласования в системах с азиму-
тальной моментной коррекцией?
8. Пояснить принцип работы межрамочной горизонтальной коррекции ГН
системы ДГМК-3.
26

Лабораторная работа № 4
НАЗЕМНЫЙ МАЯТНИКОВЫЙ ГИРОКОМПАС
1 Цель работы
1. Изучение принципа действия и конструкции наземных маятниковых ги-
рокомпасов на примере гирокомпаса АГ.
2. Определение азимута заданного ориентирного направления на земной
поверхности.
2 Оборудование, измерительные приборы и инструменты.
1. Гирокомпас АГ на платформе.
2. Преобразователь.
3. Гирокомпас в разрезе.
4. Чувствительный элемент (ЧЭ) в разрезе.
5. Секундомер.
3 Содержание
При выполнении работы необходимо изучить принцип действия, схему и
конструкцию гирокомпаса АГ, произвести пуск прибора и определить истин-
ный азимут ориентира (по указанию руководителя).
3.1 Общие сведения
Наземные маятниковые гирокомпасы (НМГК) являются высокоточными
приборами и используются для определения истинных азимутов ориентирных
направлений на местности и выполнения маркшейдерских работ.

ределения азимута ≈ 26 мин. Пределы географических широт работы ±65°.
Поскольку НМГК устанавливаются на неподвижном относительно Земли
основании, основным режимом их работы является режим незатухающих коле-
баний, т.е. им не нужна система успокоения собственных колебаний, услож-
няющая конструкцию. В таких приборах также не нужно выполнять условие
Шулера: период собственных незатухающих колебаний выбирают из условия
обеспечения приемлемого времени, необходимого для определения плоскости
меридиана. Для таких приборов определяющим является требование малости
возмущающих моментов, действующих вокруг вертикальной оси подвеса.
С учетом этих обстоятельств наиболее приемлемой схемой построения
НМГК является такая, в которой чувствительный элемент вытянутой формы
подвешивается с помощью жидкостного, торсионного или магнитного подвесов
(рис. 2а-б). Величина периода собственных колебаний в этом случае ограничи-
вается приемлемыми размерами (длиной) чувствительного элемента. Так, на-
пример, для того, чтобы период собственных колебаний гирокомпаса с кинети-
ческим моментом Н=1 Н.м.с и весом чувствительного элемента G=20 H на ши-
роте 51° равнялся Т0=10мин.=600с., необходимо в соответствии с формулой для
периода собственных незатухающих колебаний
При использовании торсионного подвеса (рис. 2а) гирокамеру 1 на жест-
кой штанге 2 свободно подвешивают в корпусе на торсионе 4. Явно выражен-
ной горизонтальной оси подвеса такой прибор не имеет: за точку подвеса при-
нимают место закрепления нижнего конца торсиона в штанге. С целью устра-
нения закручивания торсиона, вызванного поворотом чувствительного элемен-
та в азимуте, используют следящий корпус 10, который синхронно отслеживает
положение верхней точки закрепления торсиона относительно штанги, повора-
чиаясь вслед за ЧЭ при помощи следящей системы. Разворот следящего корпу-
са осуществляется двигателем 7 через редуктор 6 по сигналу рассогласования,
усиленного усилителем 8. Таким образом, торсион почти не деформируется, то
есть противодействующий упругий момент относительно вертикальной оси
практически отсутствует. С целью уменьшения ошибок слежения в следящей
системе используют оптические датчики углов. 9. Для уменьшения моментов
магнитного взаимодействия деталей чувствительного элемента, изготовленных
из ферромагнитных материалов, с магнитным полем Земли используют маг-
нитные экраны.
При использовании жидкостного подвеса чувствительный элемент вы-
полняют в виде полого герметичного цилиндра 1, в нижней части которого ус-
тановлен гиромотор 2. ЧЭ плавает в жидкости, помещенной в резервуаре 5.
28
Вверху чувствительный элемент имеет опорный наконечник (шпиль), входящий в
ζ
4
5
12
3
3
6
11
2
10
6
9
Q
7
1
О
2
8
H
O1
8
7
4
1
G
5
Рис. 2. Схемы подвесов НМГК
отверстие рубинового кольца 3. Опорный наконечник входит в кольцо под дейст-
вием выталкивающей силы жидкости. При этом чувствительный элемент центри-
руется относительно резервуара. Геометрическая ось чувствительности элемента
стремится сохранять вертикальное положение. Это объясняется тем, что центр
тяжести О чувствительного элемента находится ниже точки подвеса О1 − центра
тяжести объема жидкости, вытесненной чувствительным элементом.
Среднее положение колеблющегося чувствительного элемента соответст-
вует направлению меридиана (направлению на север). Для определения этого
направления снимают отсчет по лимбу угломерной части в положениях, соот-
α
30
N2
N4
20
N3
N1
Nср
10
t
0
T
3
0
T
T
2T
2
2
Рис. 3. Траектория движения главной оси ГК
29

ветствующих остановке чувствительного элемента. Эти положения называется
точками реверсии чувствительного элемента (рис. 3).
Положение угломерной части, соответствующее точкам реверсии, определяется
автоколлимационным способом (по отраженному изображению штриха).
Для этого с угломерной частью жестко связана автоколлимационная трубка, а
на корпусе чувствительного. элемента (рис. 1б) закреплено зеркало 6.
Если затухание собственных колебаний ГК отсутствует, положение плос-
кости меридиана можно определить как биссектрису угла между двумя точками
3.2 Устройство гирокомпаса АГ
Гирокомпас состоит из гироузла и угломерной части. В комплект входит
также преобразователь.
3.2.1 Гироузел
Гироузел состоит из чувствительного элемента (ЧЭ), резервуара с под-
держивающей жидкостью, оптического отвеса, механизма аррети-
рования и элементов обогрева. Состав поддерживающей жидко-
сти: метиловый спирт - 70%; дистиллированная вода - 30%; бура
на 1 л раствора - 4,5г.
Чувствительный элемент представляет собой полый цилиндр 8
(рис. 4) герметически закрытый крышкой 23 и дном 32. В крышке
установлен опорный наконечник (центрирующий шпиль) 21 в оп-
раве. Оправа крепится к крышке при помощи четырех винтов. К
дну крепится контактная пластина (электрод) 3, изолированная от
дна эпоксидным лаком, электроизоляционным кольцом и изоляци-
онной втулкой и балластный грузик 31 с четырьмя винтами, на ко-
торых укреплены дополнительные балансировочные шайбы.
В нижней части цилиндра укреплен стакан 30, на котором
установлен гиромотор 29. На цилиндрической поверхности чувст-
вительного элемента закреплено зеркало 24 и нанесены два токо-
ЧЭ АГ
съемных электрода 12 и 27, изолированные от цилиндра эпоксид-
ным лаком. К электродам припаяны провода, соединяющие электроды с кон-
30
тактной колодкой, расположенной на стакане. Провода от гиромотора припая-
ны к соответствующим лепесткам контактной колодки. Вся наружная поверх-
ность чувствительного элемента, кроме электродов, покрыта слоем эпоксидно-
го лака, посредством которого осуществляется герметизация и электроизоляция
чувствительного элемента.
Резервуар представляет собой полый цилиндрический корпус 6 с дном 1 и
крышкой 22. В верхней части цилиндра имеется смотровое окно. Через смотро-
вое окно, закрытое защитным стеклом 25, видно зеркало, укрепленное на кор-
пусе чувствительного элемента.
Внутри резервуара закреплены два токопроводящих электрода 7 и 11 и
контактная пластина (электрод) 2, изолированные от корпуса слоем эпоксид-
ного лака и изоляционными втулками. Кольцевые электроды закреплены на бо-
ковой поверхности корпуса, а контактная пластина на дне 1 резервуара. Элек-
троды и пластина соединены проводами с контактами штепсельного разъема.
На корпус 6 надет пермаллоевый экран 28, ослабляющий действие внешних
электромагнитных полей на гиромотор чувствительного элемента.
С корпусом резервуара соединено основание (трегер) 10 с тремя подъемными
винтами 9, штепсельным разъемом электрического кабеля и кнопкой блокиров-
ки терморегулятора.
Для предохранения от коррозии внутренняя сторона крышки покрыта
эпоксидным лаком. В центральной выточке крышки крепится оправа 18 с руби-
новым кольцом 9. Снаружи весь резервуар защищен термоизоляционным ко-
жухом 4 из пенопласта.
Оптический отвес служит для точной установки гирокомпаса над заданной точ-
кой местности.
Механизм арретирования служит для закрепления чувствительного элемента в
нерабочем положении и монтируется в крышке 22. В квадратное отверстие
крышки вставлен толкатель с винтом-осью 15, на горизонтальную ось которого
надет арретир 13. К другому концу арретира шарнирно прикреплен конус 21
арретира, который одновременно служит для прижатия чувствительного эле-
мента к амортизационному кольцу резервуара при арретировании и для предо-
хранения чувствительного элемента от попадания капель жидкости с крышки
резервуара. Между толкателем и винтом-осью установлена мембрана 17 для
герметизации резервуара.
На винт-ось навинчена шестерня 14 арретира, которая ограничена от осевых
перемещений крышкой 16. При повороте шестерни арретира винт-ось ввинчи-
вается (вывинчивается) и этим самым перемещает конус арретира вниз (вверх).
Для устранения самоотвинчивания винта-оси при транспортировке в крышку
вмонтирована собачка, которая поджимается пружиной к шестерне арретира,
удерживая ее своим зубом от поворота.
Элементами подогрева гироузла являются подогреватель 5, биметаллический
терморегулятор и кнопка блокировки терморегулятора.
Подогреватель служит для подогрева поддерживающей жидкости и представ-
ляет собой двойной цилиндр, в котором намотано проволочное сопротивление
31
(6 Ом). Подогреватель установлен в нижней части корпуса гироузла и покрыт
эпоксидным лаком.
Рис.4. Конструкция гироузла
32
Терморегулятор служит для автоматического включения и выключения подог-
ревателя. Он настроен таким образом, что при охлаждении поддерживающей
жидкости до 0 -15°С биметаллическая пластина изогнется так, что ее контакт
замкнет цепь обогрева гироузла.
Когда температура поддерживающей жидкости повысится до +20°С биме-
таллическая пластина изогнется в обратную сторону и цепь обогрева разомкнется.
Для сохранения постоянства зазора между дном резервуара и дном чувстви-
тельного элемента, а также во избежание выхода опорного наконечника из ру-
бинового кольца и зеркала чувствительного элемента из поля зрения автокол-
лимационной трубки, необходимо обеспечить постоянство выталкивающей си-
лы поддерживающей жидкости при различных температурах. Постоянство по-
ложения чувствительного элемента по высоте внутри резервуара при измене-
нии температуры от -40° до +50°С в гироузле обеспечивается автоматической
коррекцией выталкивающей силы.
Принцип работы коррекции выталкивающей силы основан на изменении
объема и удельного веса поддерживающей жидкости при изменении ее темпе-
ратуры. Так, например, при повышении температуры удельный вес жидкости
уменьшается, следовательно, должна уменьшиться и выталкивающая сила, но
объем жидкости с увеличением температуры увеличивается, следовательно, ее
уровень в резервуаре повышается и увеличивается объем вытесненной чувстви-
тельным элементом жидкости, поэтому выталкивающая сила будет также уве-
личиваться. При понижении температуры будет происходить обратный про-
цесс, т.е. удельный вес жидкости будет увеличиваться, а объем жидкости
уменьшаться.
Геометрические и весовые характеристики чувствительного элемента
рассчитаны так, что влияние этих двух факторов взаимно компенсируется; вы-
талкивающая сила автоматически поддерживается постоянной, чем и достига-
ется постоянство положения по высоте чувствительного элемента внутри ре-
зервуара.
3.2.2 Угломерная часть
Угломерная часть гирокомпаса служит для измерения горизонтальных
углов на местности и снятия отсчетов в точках реверсии чувствительного эле-
мента. Основными частями угломерной части (рис.5) являются: зрительная
труба, колонка, отсчетное устройство, низок с лимбом, автоколлимационная
трубка, буссоль и уровень
В оптическую систему угломерной части гирокомпаса (рис. 6) входят оп-
тические системы зрительной трубы, отсчетного устройства и автоколлимаци-
онной трубки.
Зрительная труба предназначена для визирования предметов. Оптическая
система зрительной трубы состоит из трехлинзового объектива 13 (рис. 5),
склеенной фокусирующей линзы 24, сетки 26 и пятилинзового окуляра 28. Под-
светка сетки осуществляется лампой 27 через светофильтр 26. Сетка представ-
ляет собой плоскопараллельную пластинку с перекрестием и делениями.
Цена деления сетки 1°. Деления оцифрованы через 10°.
33
16
17
15
8
6
7
9
10
14
5
11
12
3
4
2
1
Рис.5 Устройство угломерной части
13
34
Зрительная
труба
27
Микроскоп
26
25
21
24
20
23
19
22
15
14
18
17
16
Автоколлиматор
13а
13б
37
5
6
7
8
36
12б
12а
35
34
11
33
10
32
4
9
31
1
2
3
30
29
28
Зеркало ЧЭ
Рис.6. Оптическая схема угломерной части
Зрительная труба жестко закреплена в отверстии горизонтальной оси, разме-
щенной в колонке, вместе с которой она может вращаться на 360°.
Колонка 5 (рис. 5) представляет собой литую деталь с двумя стойками. В
нижней части колонки смонтированы механизм стопорения вертикальной оси и
механизм точной горизонтальной наводки. Для выполнения точной горизон-
тальной наводки необходимо застопорить вертикальную ось. Стопорение про-
изводится нажатием на рычаг 3 вниз до отказа. После стопорения вертикальной
оси возможна точная горизонтальная наводка при помощи маховичка 4 (разме-
щен за колонкой с другой стороны рычага). В одной стойке колонки смонтиро-
ваны механизм стопорения горизонтальной оси и механизм точной вертикаль-
ной наводки. В другой стойке смонтированы детали оптического микрометра.
Стопорение горизонтальной оси производится поворотом рычага 9 вверх до от-
35
каза. Точная вертикальная наводка зрительной трубы производится вращением
маховичка 10 наводящего винта.
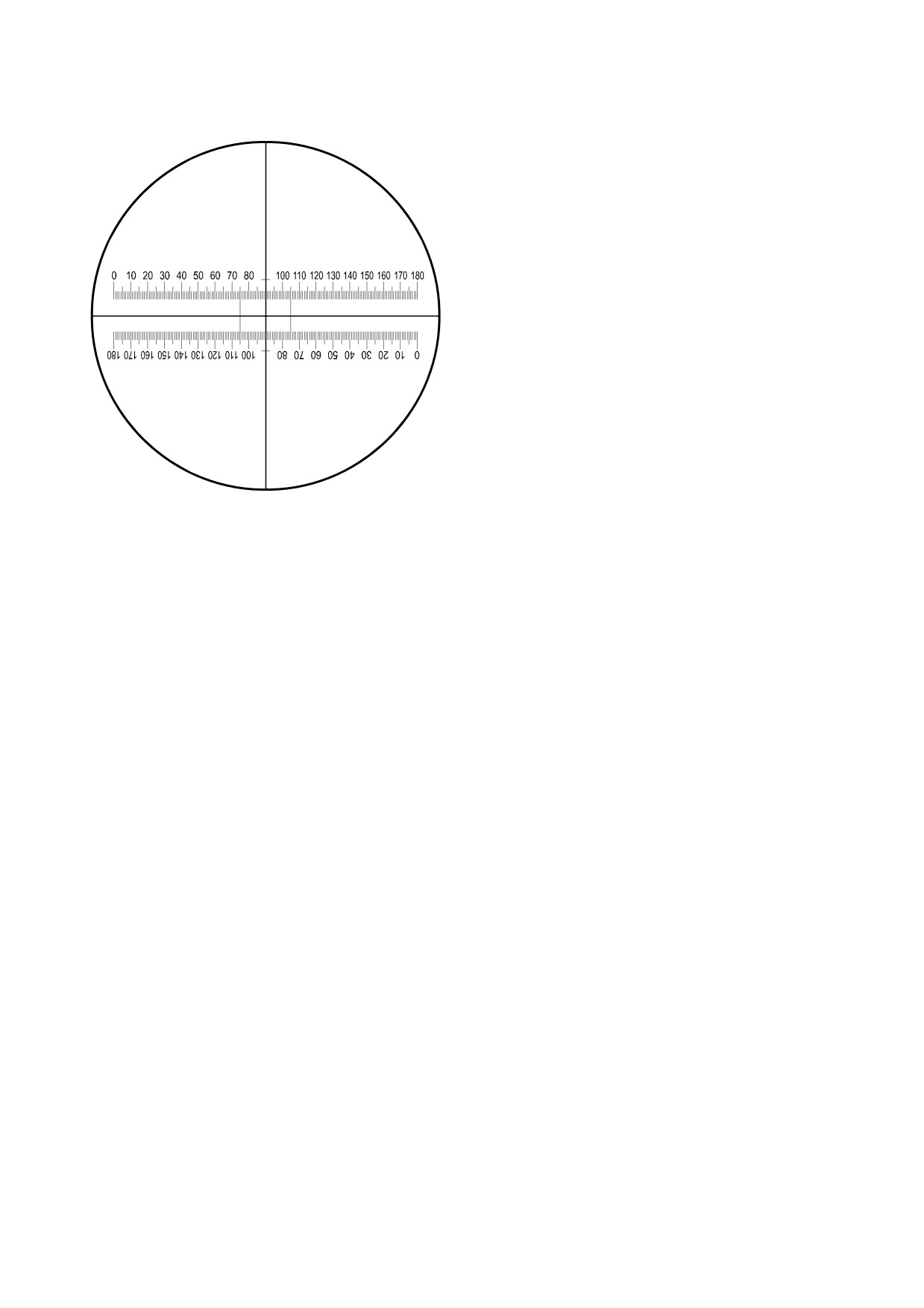
Для грубого наведения зрительной
трубы на предмет служат механические
визиры, состоящие из мушек и целиков.
Поле зрения зрительной трубы
показано на рис. 7.
Отсчетное устройство предназначено
для снятия отсчетов по лимбу и состоит
из осветительного устройства, двух час-
тей проекционного устройства, микро-
метра и микроскопа.
Оптическая система отсчетного устрой-
ства состоит из оптических систем осве-
тительного устройства, проекционного
устройства, оптического микрометра
микроскопа. Осветительное устройство
Рис. 7. Поле зрения зрительной
служит для освещения двух диамет-
трубы
рально противоположных частей лимба
4. Оптическая система осветительного
устройства состоит лампы подсветки 1, светофильтра и защитного стекла 2,
призмы 3. Оптическая система проекционного устройства состоит из двух час-
тей. Первая часть проекционного устройства служит для построения изображе-
ния делений левой части лимба в плоскости делений правой части (диамет-
рально противоположной относительно левой) и состоит из призмы 5, двух
склеенных линз 6 и 7 объектива и призмы 8.
Вторая часть проекционного устройства служит для проектирования изображе-
ний двух диаметрально противоположная левой и правой частей лимба в плос-
кость линзы 17. Перемещением линз 10 и 11 можно регулировать резкость и ве-
личину изображения делений лимба в плоскости линзы 17, т.е. резкость микро-
метра.
Оптический микрометр служит для отсчетов по лимбу с точностью 1″. Оптиче-
ская система микрометра состоит из неподвижных клиньев 12, передвижных
клиньев 13, разделительного блока 14, шкалы 15 микрометра, диафрагмы 16 и
линзы 17. Передвижные клинья 13 имеют механическую связь с маховичком 8
(рис. 5) и шкалой 16 микрометра.
При повороте маховичка клинья поднимаются вверх или опускаются вниз (в за-
висимости от направления поворота маховичка). Преломляющие углы клиньев
одинаковы, но направлены в противоположные стороны. Величина перемеще-
ния клиньев 13 регистрируется по шкале 15 микрометра. Клинья составляют
важнейшую часть микрометра. Одна пара клиньев 12а и 13а помещена на пути
пучка лучей, дающих прямое изображение делений левой части лимба, вторая
12б и 13б - на пути пучка лучей, дающих перевернутое изображение делений
правой части лимба, расположенных на диаметрально противоположной сторо-
не.
36

Клинья поставлены параллельно один другому, но так как их углы пре-
ломления направлены в противоположные стороны, то при движении клиньев
лучи смещаются в противоположных направлениях. Поэтому перемещением
клиньев можно совместить изображения диаметрально противоположных деле-
ний лимба и зарегистрировать при помощи шкалы 15 величину перемещения
клиньев.
Разделительный блок 14 предназначен для разделения изображений левой и
правой части лимба. Между разделительным блоком и линзой 17 помещена диа-
фрагма 16, которая предназначена для ограничения поля зрения микроскопа.
Шкала микрометра имеет 600 делений. Цена наименьшего деления шкалы
микрометра 1″. Слева на шкале оцифрованы штрихи, соответствующие мину-
там, а справа - десятисекундным интервалам. Штрихи, кратные пяти, в преде-
лах десятисекундного интервала удлинены. За шкалой установлена диафрагма
16, которая разделяет изображения шкалы микрометра и штрихов лимба.
Микроскоп служит для рассмат-
ривания делений лимба и шкалы мик-
рометра при снятии отсчетов. Оптиче-
ская система микроскопа состоит из
призмы 18, объектива 19, фокусирую-
щей линзы 20 и четырехлинзового оку-
ляра 21. В поле зрения микроскопа
видны два окна (рис. 8). В правом окне
видны деления шкалы микрометра и
неподвижный горизонтальный индекс
(черта), при помощи которого отсчиты-
вается количество делений по шкале
микрометра.
В левом окне сверху видно пря-
мое изображение штихов лимба, снизу
Рис. 8. Поле зрения микроскопа
- перевернутое изображение диамет-
рально противоположных штрихов
лимба. Вверху, кроме того, имеется неподвижный индекс, при помощи которо-
го можно отсчитывать десятки минут.
Чтобы произвести точный отсчет по лимбу, надо повернуть маховичок
микрометра так, чтобы видимые в окне штрихи верхних и нижних делений со-
вместились, как изображено на рис. 8. По верхнему изображению деления лим-
ба отсчитывается число градусов, находящееся слева от неподвижного индекса
или непосредственно над ним. Затем отсчитываются десятки минут, равные
числу интервалов, заключенных между верхним штрихом, который соответст-
вует отсчитанному числу градусов и нижним штрихом, отличающимся от верх-
него на 180°. Число единиц минут отсчитывается в правом окне по левой оциф-
ровке шкалы микрометра. Число секунд отсчитывается в том же окне по правой
оцифровке шкалы. Например, на рис. 6 отсчет равен 85° 55′ 52".
Автоколлимационная трубка служит для фиксирования точек реверсии
чувствительного элемента и состоит (рис. 6) из линзы 28, призмы 29, двухлин-
37
зового объектива 30, фокусирующей линзы 31, сетки 34, призмы 36 и трехлин-
зового окуляра 37. Подсветка сетки осуществляется лампой через светофильтр
33 и призму 35. Фокусирующая линза может перемещаться в осевом направле-
нии при помощи реечной передачи. Перемещение осуществляется при помощи
головки 1 (рис. 5). Вращением головки устанавливается четкая видимость от-
раженного зеркалом штриха сетки. Окуляр установлен в оправе, соединенной с
диоптрийным кольцом 2 (рис.5). Вращением
диоптрийного кольца окуляр устанавливается
по глазу наблюдателя на резкую видимость
сетки.
Поле зрения автоколлимационной трубки при
визировании контрольного зеркала показано
на рис. 8.
Рис. 9. Поле зрения авто-
Автоколлимационная трубка смонтиро-
коллимационной трубки
вана в приливе нижнего корпуса.
Низок с лимбом предназначен для уста-
новки и крепления угломерной части на гироузле и состоит из основания низка
и лимбовой части 14.
Буссоль предназначена для приближенного ориентирования гирокомпаса
по магнитному меридиану.
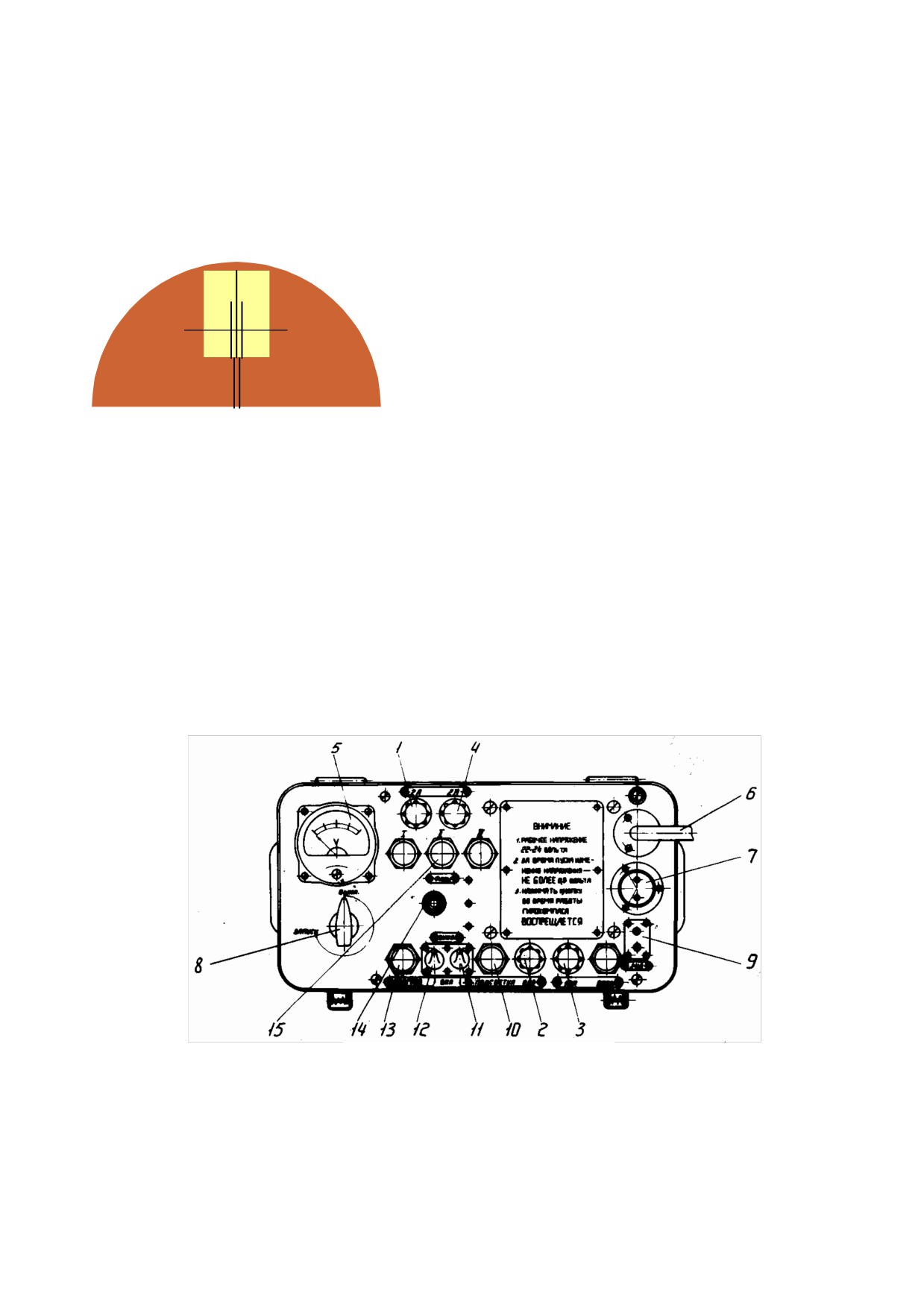
3.2.3 Преобразователь.
Преобразователь предназначен для преобразования постоянного тока в
переменный трехфазный, идущий на питание гиромотора, и для питания посто-
янным током схем электрообогрева гироузла и подсветки угломерной части.
Панель с установленными на ней вольтметром, преобразователем ПАГ-
Рис. 10. Преобразователь
1Ф и другими элементами размещена в металлическом футляре. Входное по-
стоянное напряжение подается в преобразователь через штепсельную вилку 7.
Поворотом рукоятки реостата 8 по часовой стрелке происходит включение пре-
образователя и регулировка входного напряжения, контролируемого вольтмет-
ром 5.
38

Наличие токов в фазах проверяется с помощью трех индикаторных ламп
15В в момент запуска гиромотора. Включение подсветки гирокомпаса произво-
дится при помощи выключателя 11. При включении выключателя загорается
контрольная лампа 10. На лицевой панели установлена розетка 9 для подклю-
чения кабеля подсветки геодезического знака.
Включение обогрева гироузла производится при помощи выключателя 12
при выключенном реостате (рукоятка реостата 8 должна находится в положе-
нии ВЫКЛ). При включении обогрева должна гореть контрольная лампа 13.
Предохранители входной цепи, цепи подсветки, цепи питания гиромотора на-
ходятся под крышкой, закрепленной на панели.
4 Описание лабораторной установки
В комплект установки входят испытуемый гирокомпас АГ, установлен-
Гирокомпас
Блок питания
Рис. 11. Лабораторная
установка
ный на платформе и блок питания.
5 Порядок выполнения работы
5.1. Перевести гирокомпас в рабочее положение. Для этого необходимо:
5.1.1. Сориентировать гирокомпас на платформе смотровым окном на юг
при помощи буссоли, укрепленной на угломерной части. Для этого необходимо
освободить фиксаторы угломерной части и поворотом зажимного винта вверх
расстопорить вертикальную ось угломерной части. Затем установить колонку
угломерной части так, чтобы автоколлимационная трубка находилась против
центра смотрового окна. Застопорить вертикальную ось угломерной части и
разворотом гирокомпаса на платформе добиться совпадения штрихов. С и Ю
ориентир-буссоли с соответствующими концами магнитной стрелки.
5.1.2. Привести угломерную честь гирокомпаса в горизонтальное положе-
ние. Для этого расстопорить вертикальную ось угломерной части и поворотом
корпуса колонки угломерной части установить ось цилиндрического уровня
параллельно линии, соединяющей два подъемных винта. Вращением этих вин-
тов в противоположные стороны вывести пузырек уровня точно на середину.
Затем повернуть корпус угломерной части на 90°, вращением третьего винта
также вывести пузырек точно на середину.
39
5.1.3. Включить питание и плавным вращением реостата преобразователя
установить показание вольтметра 22-24В. Записать время включения в журнал
наблюдений.
5.1.4. Проверить наличие тока в фазах. Наличие тока в фазах проверяется в
пусковом режиме гиромотора. При этом зажигаются три сигнальные лампы, ус-
тановленные в каждой фазе. По мере разгона гиромотора лампы постепенно
гаснут.
5.2. Снять отсчет по контрольному зеркалу. Для этого необходимо вклю-
чить выключатель подсветки на преобразователе. При этом должна загореться
сигнальная лампа ПОДСВЕТКА. Разворотом корпуса угломерной части навес-
ти автоколлимационную трубку на контрольное зеркало и застопорить верти-
кальную ось. Вращением окуляра автоколлимационной трубки добиться четкой
видимости биссектора, а вращением головки трубки − четкой видимости отра-
женного штриха. Вращением наводящего винта угломерной части ввести отра-
женный штрих в середину биссектора и снять отсчет по лимбу угломерной час-
ти и шкале микрометра.
5.3. Определить горизонтальный угол направления на ориентир. Для этого:
5.3.1. Произвести наведение зрительной трубы на ориентир (эталонное
направление) при "круге лево" КЛ1. Для этого расстопорить вертикальную и
горизонтальную оси и навести зрительную трубу с помощью механического ви-
зира на эталонное направление. При этом окуляр зрительной трубы должен на-
ходиться со стороны автоколлимационной трубки.
5.3.2. Застопорить горизонтальную и вертикальную оси и наводящими
винтами навести перекрестие сетки зрительной трубы точно на ориентир;
5.3.3. Снять отсчет по лимбу (например: 90 16'16") и записать его в жур-
нал;
5.3.4. Зрительную трубу перевести через зенит и повторить операции при
"круге право" КП1. Полученные результаты занести в журнал наблюдения.
5.3.5. Повторить п.п. 1 - 4 и найти значения КЛ2 и КП2.
5.4. Определить гирокомпасом азимут. Для этого:
5.4.1. Вращением шестерни арретира при сжатой собачке храповика плав-
но разарретировать чувствительный элемент.
5.4.2. Разворотом угломерной части ввести в поле зрения автоколлимаци-
онной трубки изображение штриха сетки, отраженное от зеркала чувствитель-
ного элемента, и при необходимости произвести фокусировку трубки.
5.4.3. Поворачивая угломерную часть вручную, наблюдать за движением
чувствительного элемента.
5.4.4. При уменьшении скорости движения чувствительного элемента по-
воротом рычага зажимного винта вниз застопорить вертикальную ось угломер-
ной части и продолжать следить за движением чувствительного элемента,
удерживая с помощью наводящего винта изображение отраженного штриха в
бисекторе автоколлимационной трубки.
5.4.5 В момент остановки чувствительного элемента изображение отражен-
ного штриха точно ввести в биссектор и прекратить вращение наводящего винта.
40

Записать в журнал время остановки чувствительного элемента и величину на-
пряжения в момент наблюдения точки реверсии.
5.4.6. Снять отсчет N1 по лимбу и записать его в журнал. Через полупе-
риод (примерно 4 - 5 минут), операцию повторить и снять отсчет N2 и т.д.
При снятии отсчетов по второй и следующим точкам реверсии наблюдение за
движением зеркала чувствительного элемента следует начинать не позже,
чем через 4 мин. после наблюдения предыдущей точки реверсии.
Рекомендуется наблюдать точки реверсии при размахе колебаний чувст-
вительного элемента в пределах от 8° до 26°.
5.4.7. Вычислить определяемый азимут по формуле:
Средний отсчет по лимбу угломерной части
N
, соответствующий по-
ср
ложению равновесия чувствительного элемента, вычисляется по формулам (3).
Поправка гирокомпаса
δ
берется из формуляра.
форм
Результаты вычислений занести в таблицу (см. приложение).
5.5. Перевести гирокомпас из рабочего положения в походное. Для этого:
5.5.1. Выключить питание и заарретировать гироузел.
5.5.2. Надеть крышку на объектив зрительной трубы угломерной части, ус-
тановить угломерную часть по красным точкам на гироузле и корпусе автокол-
лимационной трубки и закрепить фиксаторами, установить трубку вертикально
и застопорить горизонтальную ось.
6 Содержание отчета
В отчете должно быть представлено краткое описание основных конструктив-
ных особенностей гирокомпаса; принципиальная кинематическая схема гиро-
компаса; результаты эксперимента, сведенные в таблицу.
7 Контрольные вопросы
1. С какой целью в гирокомпасе применен гидростатический подвес чув-
ствительного элемента?
2. Как подводится питание к гиромотору ЧЭ?
3. Почему ЧЭ гирокомпаса имеет форму вытянутого цилиндра?
4. Что такое формулярная поправка гирокомпаса. Какие методы её
уменьшения используются в исследуемом гирокомпасе?
5. Почему гирокомпас нельзя использовать в высоких широтах?
6. Как достигается секундная точность определения горизонтальных уг-
лов угломерной частью.
41

7. Для чего наведение зрительной трубы и отсчет на ориентир произво-
дится при «круге лево» и «круге право»?
8. Для чего и как производится компенсация температурного расширения
поддерживающей жидкости?
9. Для чего и как производится начальная выставка гирокомпаса в азимуте?
10.Для чего и как перед пуском производится горизонтирование прибора?
11.Как должны быть взаимно сориентированы плоскость зеркала ЧЭ и ось
вращения гиромотора?
8 Литература
1. В.Ю. Торочков. Гиротеодолиты. «Надра», 1970.
2. Бондарь П.М. Конспект лекций по дисциплине “Вимірювальні перет-
ворювачі, прилади і системи”.
Приложение к отчету
Сводная таблица результатов измерений
Дата проведения исследований:__________
Выполнила бригада №__ гр. ПГ-
Определяемое направление ориентир №___
Студенты
________________
________________
________________
________________
4
Лабораторная работа №5
ИССЛЕДОВАНИЕ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ
1 Цель работы
Целью работы является изучение на примере унифицированного датчика
угловой скорости ДУСУ принципа действия, схемы и конструкции двухстепен-
ных гироскопических тахометров и методов определения основных динамиче-
ских параметров.
2 Оборудование, измерительные приборы и инструменты.
При выполнении 4.1. работы (определение статической характеристики)
используются действующие приборы ДУСУ и ДУСМ, установка для проверки
датчика ДУСУ, поворотная установка МПУ-1, вольтметр для измерения посто-
янного напряжения с пределом измерения до 30В, стабилизированный источ-
ник питания, секундомер.
При выполнении п. 4.2 работы используется установка для проверки
датчика ДУСУ, осциллограф
(компьютер с программным обеспечением и
встроенной платой сопряжения).
При изучении конструкции приборов используются макеты датчиков уг-
ловой скорости ДУСУ и ДУСМ, а также плакаты конструкции ДУСУ.
3 Содержание работы
1. Изучить особенности конструкции гиротахометров ДУСМ и ДУСУ,
научиться экспериментально определять основные динамические параметры
прибора.
2. Ознакомиться с технико-эксплуатационными параметрами приборов
ДУСУ, с условиями их работы.
3. Научиться экспериментально снимать переходную функцию прибора.
4. Научиться определять по переходной функции динамические парамет-
ры прибора; частоту затухающих и незатухающих колебаний, коэффициенты
затухания.
5. Экспериментально построить статическую характеристику прибора.
3.1 Общие сведения.
Гироскопические тахометры (ГТ) предназначены для измерения абсолютной
угловой скорости основания. Эти измерители являются инерциальными, т.е. не тре-
буют связи с внешней средой, относительно которой вращается основание.
ГТ с упругой механической связью представляет собой двухстепенной ги-
роскоп, снабженный упругой связью, создающей момент сил упругости Мпр= - Сβ
относительно измерительной оси и демпфирующим устройством (рис.1). В гиро-
тахометре типа ДУСУ имеется также датчик момента.
Лабораторная установка позволяет вращать исследуемый прибор только во-
круг одной оси (оси чувствительности). При вращении основания с угловой ско-
43

ростью U, направленной вдоль оси XC (оси чувствительности) возникает гиро-
скопический момент MГ = H.U, направленный вдоль измерительной оси ZC. Он
вызовет поворот главной оси гироскопа вокруг измерительной оси на угол β и
деформацию пружины. В положении равновесия гироскопический момент
уравновешивается моментом Сβ упругой связи. Из равенства двух моментов
следует:
(1)
Коэффициент пропорциональности k = H/C между измеренной угловой
скоростью и углом поворота β называют статическим коэффициентом пере-
дачи гиротахометра.
Zc
F
Zc,Z
Д
H
Y
Uxc
H
UXC
Xc
Xc
Yc
Yc
X
HUXC
Пр
Mтр
F
б)
а)
ДМ
Рис. 1. Кинематический чертеж



3.2 Краткая характеристика датчиков ДУСУ
Датчики угловой скорости унифицированные типа ДУСУ представляют
собой гироскопические тахометры, основанные на использовании двухстепен-
ного гироскопа. Датчики ДУСУ изготавливаются для следующих 10 значений
диапазонов измерения угловых скоростей, °/с: ±6; ±12; ±18; ±30; ±45; ±60; ±120;
±180; ±300; ±600. Диапазон измеряемых угловых скоростей в рассматриваемых
приборах изменяют использованием пластинчатых пружин различной толщи-
ны. Датчики типа ДУСУ имеют два варианта конструкции.
В варианте 1 (рис.4) прибор крепится с помощью специального фланца
квадратной формы, т.е. базовой установочной поверхностью является плос-
кость фланца в средней части корпуса прибора, перпендикулярная к оси подве-
са гироскопа. Другая отличительная особенность первого варианта конструк-
ции - наличие штепсельного жгута проводов электрической связи прибора с
источником питания и потребителями информации.
U
Измерительная
ось
H
Вариант 1 (ДУСУ1)
Вариант2 (ДУСУ2)
Рис. 4. Варианты конструкции ДУСУ
В варианте 2 конструкции базовой установочной поверхностью являются
цилиндрические пояски на корпусе прибора. Крепление прибора производится
хомутиком. В этом варианте конструкции штепсельного разъема нет, провода
для подачи напряжения питания и съема информации подпаивают непосредст-
венно к гермовводам, закрепленным на торце корпуса прибора.
Положение оси чувствительности прибора показано на его корпусе за-
крашенной точкой и искривленной стрелкой.
Приборы типа ДУСУ выпускают для трех видов напряжения и частоты
питания гиродвигателя:
− трехфазное напряжение 36 В, 400 Гц (условное обозначение - вариант А);
− трехфазное напряжение 40 В, 500 Гц (условное обозначение - вариант Б);
− трехфазное напряжение 36 В, 1000 Гц (условное обозначение - вариант В).
Приборы с вариантом питания А производят для летательных аппаратов
кратковременного действия и летательных аппаратов длительного действия. В
47

обозначении последних после буквы А, характеризующей вариант питания, ста-
вится буква С.
3.3 Особенности конструкции прибора.
В упрощенном виде устройство прибора показано на кинематической схе-
ме (рис. 5).
5
4
3
2
1
Рис. 5. Кинематическая схема ДУСУ
Прибор ДУСУ содержит следующие основные узлы: гироузел 3, меха-
низм передачи углового перемещения гироузла на выходной электрический
датчик угла 1, потенциометрический выходной датчик угла, датчик момента 2,
демпфер 4, сильфон 5. Гироузел выполнен в виде цилиндрического поплавка.
Пространство между поплавком и корпусом прибора заполнено поддерживаю-
щей жидкостью. Жидкость частично взвешивает поплавок, уменьшая трение в
шариковых подшипниках, обеспечивает демпфирование собственных колеба-
ний и повышает ударную прочность, вибропрочность и виброустойчивость
прибора. Упругая связь выполнена в виде двух пластинчатых пружин, связы-
вающих подвижную часть с корпусом прибора. Датчик угла - потенциометри-
ческий.
Отличительная особенность датчиков типа ДУСУ (по сравнению с прибо-
рами более ранней разработки типа ДУСМ) − наличие магнитоэлектрического
датчика момента 2, предназначенного для контроля работоспособности прибора.
Контроль производится следующим образом. На датчик момента подают с пуль-
та проверки определенное напряжение постоянного тока. Под действием момен-
та, развиваемого датчиком момента, подвижная часть прибора поворачивается на
угол, пропорциональный моменту. О величине этого угла судят по выходному
сигналу, снимаемому с потенциометрического датчика угла прибора.
Чертеж прибора ДУСУ-2 изображен на рис.6.
48

Как видно из чертежа и разрезного прибора, гиродвигатель 5 помещен в
цилиндрический поплавок, состоящий из стакана 4 и дна 6, соединенных гер-
метически. Трехфазное напряжение питания подается к гиродвигателю через
гибкие токоподводы и гермовводы в дне поплавка и в корпусе прибора, внут-
ренняя полость поплавка заполнена водородом для уменьшения вентиляцион-
ных потерь и улучшения теплоотвода от гиродвигателя. Поплавок с размещен-
1
2
3
4
5
6
7
8
9
10
11
16
15
14
13
12
Рис. 5. Конструкция датчика ДУСУ 2
ным в нем гиродвигателем образует гироузел. Гироузел подвешен в корпусе
прибора с помощью шарикоподшипников 2 и 10, установленных во втулке 16 и
фланце 12. Пространство между гироузлом и корпусом прибора заполняется
жидкостью, гидростатическая сила которой частично разгружает подшипники
подвеса гироузла. Гироузел статически балансируется после закрепления на
нем всех деталей с перемещением балансировочных винтов в лопатках демпфе-
ра 3, приклеенного к торцу стакана 4. На цапфе дна 6 поплавка закреплены
шестиполюсный постоянный магнит 7 датчика момента и палец 13, который
передает угловое перемещение гироузла на передаточный механизм 11, связы-
вающий гироузел с движком потенциометрического датчика угла. На корпусе
15 прибора закреплен узел катушек 8 и неподвижный магнитопровод.
Передаточный механизм состоит из измерительных пружин и деталей
регулировки коэффициента передачи прибора и предназначен для создания про-
тиводействующего момента повороту гироузла и преобразования угла поворо-
та гироузла в электрический сигнал. Устройство передаточного механизма
показано на рис. 7.
К основанию 5 привернуты 2 плоские пружины 7, расположенные под
углом 90° друг к другу. Толщина пружин, а следовательно, и их жесткость у
приборов с разными верхними пределами измерения угловой скорости различ-
на. С другой стороны к пружинам прикреплен сухарь 8. В сухаре имеется паз,
49
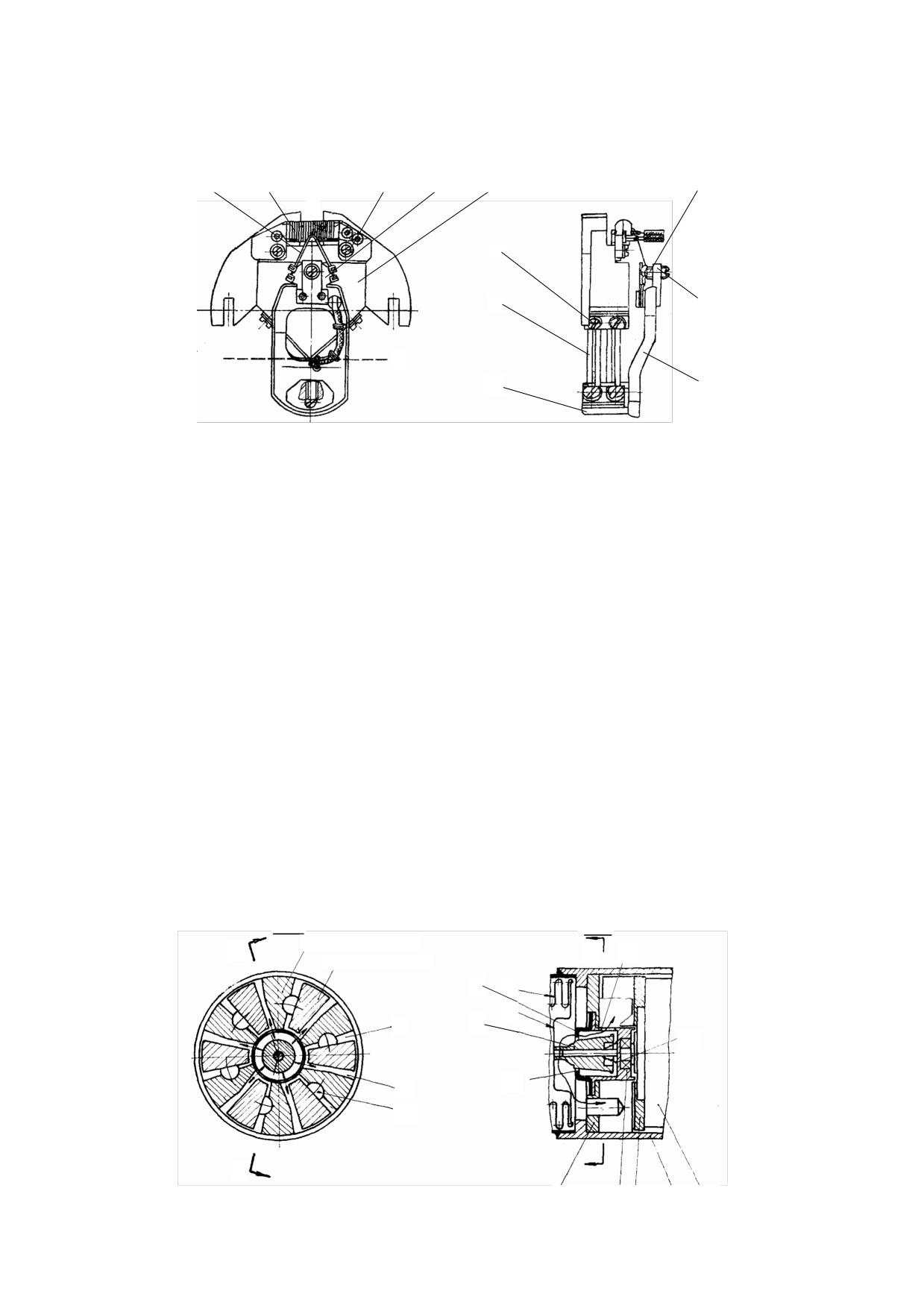
в который с зазором входит палец гироузла. К сухарю привернут щеткодержа-
тель 9, на котором закреплена пластина 10 с 2-мя щетками 1. Щеткодержатель
электрически изолирован от пластины со щетками.
11
1
2
3
4
y
6
7
10
х
8
9
Рис. 7. Передаточный механизм
На основании винтами 3 закреплен потенциометр 2. Потенциометр
представляет каркас с намотанным эмалированным проводом. В месте контакта
потенциометра со щётками эмаль снята. На каркас вклеены 3 контакта, соеди-
ненные с концами намотки и средней точкой потенциометра. Положение щеток
относительно потенциометра регулируется таким образом, чтобы щетки каса-
лись того витка, от которого выведена средняя точка. Натяг щеток на потенцио-
метр устанавливается винтом 11.
Основание двумя винтами крепится на фланце 12 (см. рис. 6), который
при ослаблении винтов 14 можно поворачивать относительно корпуса для на-
чальной выставки гироузла относительно оси чувствительности.
Основание с закрепленными на нем деталями можно перемещать в вер-
тикальном направлении вращением винта 9. Это дает возможность регулиро-
вать расстояние от точки касания пальца 13 с сухарем до линии пересечения
плоских пружин, т.е. регулировать коэффициент передачи прибора.
Демпфер предназначен для успокоения колебаний гироузла и поддержа-
ния их постоянными во всем диапазоне температур. Его устройство изображено
на рис.8.
А-А
Б-Б
Лопатка статора
Б
А
Е
Лопатка ротора
8
9
7
В
6
10
Ж
Г
Д
Б
5
4
3
2
1
Рис. 7. Устройство демпфера
50

К корпусу прибора 2 (15 на рис. 6) привернут без зазора по наружному
диаметру статор 5. В расточку статора без зазора вставлена втулка 4. Внутри
втулки по направляющей может перемещаться конус 6. К втулке привернута
диафрагма 8.
На гироузле 1 (4 на рис. 6) закреплен ротор 3. Ротор не касается втулки и
корпуса. Статор и ротор представляют диски с 6-ю лопатками на каждом. Вы-
сота лопаток статора и ротора одинакова. Лопатки ротора входят во впадины
между лопатками статора с зазором по торцу.
Демпфер работает следующим образом. При повороте гироузла поворачи-
ваются лопатки ротора. Жидкость из полостей «Г» должна перейти в полости
«В» или, наоборот, в зависимости от направления поворота гироузла. Часть
жидкости переходит через зазоры, другая часть через отверстия «Е», кольце-
вую щель «Ж» и отверстие «Д».
Изменение вязкости жидкости при изменении температуры компенси-
руется изменением сечения кольцевой щели «Ж». При повышении температу-
ры дно сильфона 7 перемещается влево, пружина 10 давит на конус и пере-
мещает его вслед за дном. Сечение «Ж» при этом уменьшается. Поскольку при
повышении температуры вязкость жидкости уменьшается, одновременное
уменьшение поперечного зазора позволяет стабилизировать величину коэффи-
циента демпфирования. При понижении температуры дно сильфона, преодоле-
вая сопротивление пружины 10, перемещает конус вправо. Сечение «Ж» уве-
личивается. Профиль конуса подобран таким, чтобы во всем диапазоне тем-
ператур затухание колебаний гироузла находилось в заданных пределах.
3.4 Описание лабораторной установки
Внешний вид лабораторной установки показан на рис. 8. Исследуемый
датчик угловой скорости 2 вместе с пультом управления 3 закреплен на крон-
Вкл ГМ
Вкл П
Вкл ДМ
штейне 4. Кронштейн позволяет со-
вмещать ось чувствительности гиро-
тахометра с осью вращения поворот-
упр
3
ной установки МПУ-1. На пульте
ДМ
управления установлены тумблеры
включения питания гиромотора, по-
тенциометра и датчика моментов, а
также пусковая кнопка датчика мо-
4
2
ментов.
Потенциометр прибора подклю-
чен к стабилизированному источнику
питания постоянного тока. Выходной
сигнал с потенциометра может пода-
1
ваться на вольтметр, а также на осцил-
лограф либо вход платы АЦП, уста-
новленной в компьютере.
Рис. 8. Лабораторная ус-
тановка
51
4 Методика проведения работы.
4.1. Изучить особенности конструкции прибора ДУСУ, используя раз-
резной макет прибора, плакаты и чертежи. Особое внимание следует уделить
конструктивному исполнению гироузла, демпфера, датчика моментов и переда-
точного механизма, устройствам статической балансировки и юстировки под-
вижной части прибора.
4.2. Снять статическую характеристику прибора. Для экспериментально-
го снятия статической характеристики использовать поворотную установку
МПУ-1. Выполнение эксперимента проводить в такой последовательности:
− подключить выход датчика угла ДУСУ к вольтметру. Подать питание
на гиродвигатель и потенциометр;
− спустя время (~ 1 мин), необходимое для разгона ротора, начинать
снимать статическую характеристику в диапазоне малых угловых скоростей
поворота платформы (0,05÷2°/с). Зафиксировать порог чувствительности при-
бора. Поскольку угловая скорость вращения поворотной установки не строго
постоянна, необходимо усреднить показания вольтметра, а значение угловой
скорости в диапазоне 0,1÷2°/с. определять измерением секундомером времени
поворота на определенный угол по шкале точного отсчета поворотной установ-
ки. Для построения статической характеристики снять 8-10 точек, производя в
каждой точке измерения по 3 раза;
− снять статическую характеристику в диапазоне средних и больших уг-
ловых скоростей (2÷35°/с). Зафиксировать максимальное значение измеряемой
угловой скорости;
− вычислить для каждой точки среднее значение входной (угловая ско-
рость) и выходной (напряжение, снимаемое c потенциометрического датчика
угла) величин.
− построить по усредненным значениям входной и выходной величин
статическую характеристику прибора.
− определить коэффициент передачи прибора, порог чувствительности и
диапазон угловых скоростей, в пределах которого выходная величина пропор-
циональна входной.
4.3. Произвести снятие переходной функции прибора. Выполнение экс-
перимента проводить в такой последовательности:
− смоделировать гироскопический момент
Hω
, соответствующий сту-
вх
пенчатой угловой скорости, моментом, прикладываемым к гироузлу датчиком
момента. Для этого необходимо:
а) подключить датчик моментов к напряжению постоянного тока 27 В;
б)подключить к выходному датчику угла прибора устройство регистра-
ции (осциллограф или ЭВМ);
− произвести запись графика переходной функции, для чего подать на-
пряжение на датчик момента включением переключателя на пульте и записать
3...4 периода собственных колебаний;
вычислить динамические параметры прибора по графику переходной
функции, используя формулы (8)…(11) методических указаний.
52
Для уменьшения погрешности определения h из-за неточности измере-
ния двух соседних максимальных отклонений
A
и
A
рекомендуется опре-
n
n
+1
делить по нескольким парам соседних максимальных отклонений (по
A
и
A
;
1
2
по
A
и
A
и т.д.), а результат расчета h усреднить.
2
3
5 Содержание отчета
В отчете должны быть представлены следующие результаты:
− кинематическая и принципиальная электрические схемы прибора;
− результаты построения статической характеристики (таблицы и графики);
− результаты расчета динамических параметров в соответствии с п. 4.3.
6 Контрольные вопросы
1. На каком этапе сборки и как проводится операция статической балан-
сировки гироузла?
2. Какой полезный эффект, кроме разгрузки подшипников на оси подвеса
гироузла, дает использование поддерживающей жидкости?
3. Используемый в приборе магнитоэлектрический датчик момента име-
ет подвижный постоянный магнит и неподвижные обмотки. Какие преимуще-
ства и недостатки имеет такая конструкция датчика момента?
4. Какими регулировками согласовывают "нулевое" положение гироузла
с осью чувствительности и "нулевой" сигнал потенциометрического датчика
угла при нейтральном положении гироузла?
5. Какими качествами должна обладать поддерживающая жидкость в
части электропроводности, теплопроводности, плотности, вязкости, величины
температурных коэффициентов плотности и вязкости, температуры замерза-
ния?
6. Основные причины погрешности прибора типа ДУСУ.
7. Как обеспечивается постоянство коэффициента демпфирования в при-
боре ДУСУ?
8. Как регулируется коэффициент передачи прибора?
9. Как в лабораторных условиях совместить ось чувствительности при-
бора с осью вращения стола МПУ-1?
10. Чем определяется порог чувствительности прибора и предельное зна-
чение измеряемой угловой скорости?
7 Литература
1. Техническое описание и инструкция по эксплуатации датчиков ДУСУ
(заводское описание).
2. Одинцов А.А. Теория и расчет гироскопических приборов. -Киев: Ви-
ща шк., 1985. - 392 с.
53
Лабораторная работа №6
ИНТЕГРИРУЮЩИЕ ГИРОСКОПЫ
1 Цель работы
Целью работы является изучение принципа действия и схем построения
двухстепенных интегрирующих гироскопов и исследование зависимости стати-
ческого коэффициента передачи прибора от коэффициента демпфирования.
2 Оборудование, измерительные приборы и инструменты.
При выполнении работы используются макет интегрирующего гироскопа,
поворотная установка МПУ-1.
3 Содержание работы
а) изучение принципа действия, схем построения и основных динамиче-
ских параметров интегрирующих гироскопов. При этом особое внимание обра-
тить на зависимость коэффициента передачи от основных параметров прибора
- кинетического момента и коэффициента демпфирования;
б) экспериментальное определение зависимости статического коэффици-
ента передачи от коэффициента демпфирования;
3.1 Общие сведения
Интегрирующие гироскопы (ИГ) − это гироскопические приборы, основан-
ные на использовании двухстепенного астатического гироскопа, предназначен-
ные для измерения угла поворота основания вокруг оси чувствительности при-
бора. ИГ отличаются от гироскопических тахометров (ГТ) отсутствием упру-
гой связи гиродвигателя с основанием. Гиродвигатель связан с основанием
только через демпфирующий элемент.
На практике распространены две конструктивные разновидности ИГ: 1) с
сухим подвесом гироскопа; 2) с поплавковым подвесом. Последние называют
также поплавковыми интегрирующими гироскопами (ПИГ).
ИГ с сухим подвесом (рис. 1) имеют двухстепенной гироскоп Г, с осью
подвеса которого связаны демпфирующие устройства Д, датчик угла ДУ. Ис-
пользование двух демпферов вместо одного улучшает симметричность характе-
ристики момента сил демпфирования при изменении знака скорости поворота
подвижной части прибора.
Электрическая связь между датчиком угла ДУ и датчиком момента ДМ,
образующаяся при замыкании ключа К, используется только для начальной вы-
ставки подвижной части прибора в рабочее исходное положение. При работе
прибора ключ К разомкнут.
Поплавковый интегрирующий гироскоп (рис. 2) конструктивно отличает-
ся размещением гиродвигателя Г в герметичном поплавке П цилиндрической
формы и заполнением всего пространства между поплавком и корпусом при-
54

бора вязкой жидкостью. Корпус ПИГ имеет сильфон С, допускающий измене-
ние объема поддерживающей жидкости при изменении температуры и этим
предохраняющий корпус от разрушения.
Основное достоинство такой схемы заключается в возможности практи-
чески полной разгрузки опор двухстепенного гироскопа от действия силы тяже-
η
Д
Д
С
η
ДУ
П
H
ωξ
Г
ξ
ζ
ξ
ДУ
К
ДМ
ДМ
Рис. 1.
Интегрирующий
Рис. 2. Поплавковый ИГ
гироскоп с сухим подвесом
сти и сил инерции при ускорениях благодаря компенсации этих сил гидростати-
ческой силой. Поэтому в ПИГ можно использовать миниатюрные опоры, необ-
ходимые, по существу, лишь для центрирования подвижной части прибора отно-
сительно корпуса, позволяющие получить весьма малые значения момента сил
сухого трения и малые значения момента дебаланса. В результате самопроиз-
вольный уход (дрейф) ПИГ под влиянием остаточных вредных моментов тща-
тельно продуманной конструкцией прибора и высокоточным изготовлением
удается снизить до величин порядка сотых долей градуса в час, т. е. до величин,
значительно меньших, чем дрейф трехстепенного гироскопа с шарикоподшипни-
ковым подвесом, и соизмеримых с дрейфом трехстепенных гироскопов с бескон-
тактными (аэродинамическим, магнитным, электростатическим) подвесами.
В качестве подшипников в ПИГ используют миниатюрные шарикоподшипники,
опоры на камнях, магниторезонансный подвес с активными элементами.
Для достижения полного взвешивания подвижной части ПИГ поддержи-
вающей жидкостью средняя плотность подвижной части прибора должна рав-
няться плотности жидкости. А для полной разгрузки опор дополнительно требу-
ется совмещение центра масс подвижной части с его центром объема, т. е. совпа-
дение точек приложения силы тяжести (инерции) и гидростатической силы. Для
55
ПИГ синтезированы специальные кремнийорганические и фторорганические
жидкости, имеющие высокую плотность (в 1,8...2,5 раза больше плотности воды),
высокую теплопроводность, стабильность физических параметров во времени,
отличающиеся не агрессивностью по отношению к конструкционным материа-
лам, хорошими электроизоляционными свойствами, отсутствием выделения га-
зов.
Поддерживающая жидкость одновременно используется для создания
демпфирующего момента. Чтобы получить достаточно большое значение коэф-
фициента демпфирования, делают малым (порядка десятой миллиметра) зазор
между поплавком и внутренней поверхностью корпуса прибора.
Рассмотрим принцип работы ИГ. При повороте основания, на котором
расположен прибор, вокруг оси ξ с угловой скоростью ωξ (рис. 1), вокруг оси
η подвеса подвижной части прибора возникает гироскопический момент
M =H ω
, вызывающий ускоренный поворот подвижной части прибора во-
г
ξ
круг оси η в соответствии с уравнением
&
I&&= Hω
− fβ
+M
,
(1)
ξ
η
&
где I − момент инерции подвижной части относительно оси ее подвеса; fβ
−
момент сил вязкого сопротивления;
M
− возмущающий момент, дейст-
η
вующий вокруг оси подвеса.
Если для простоты принять ωξ= const, при некоторой угловой скоро-
&
сти
, при которой выполняется равенство
&
H
=
fβ
(2)
ωξ
и отсутствии моментов сопротивления наступает установившийся режим
&
движения со скоростью
= const. В соответствии с (2), эта установившаяся
скорость
β&=H
ω
(3)
ξ
f
Следовательно, установившаяся скорость поворота подвижной части
прибора пропорциональна угловой скорости
ω
поворота основания. В каче-
ξ
стве выходной величины ИГ используют угол β поворота подвижной части
прибора, точнее, электрический сигнал Uвых, пропорциональный углу β. Ин-
тегрированием выражения (3) в предположении Н, f = const получим:
t
H
H
β
=
ω
dt
=
ψ
(4)
∫
ξ
ξ
f
f
0
t
где
ψ
=
ω
dt
- приращение угла поворота основания прибора вокруг оси ξ
ξ
∫
ξ
0
за время работы прибора.
Изложенный принцип работы ИГ позволяет сделать вывод, что осью чув-
ствительности прибора (входной осью), как и для двухстепенного ГТ, является
ось, перпендикулярная к главной оси гироскопа и к оси подвеса гиродвигате-
56
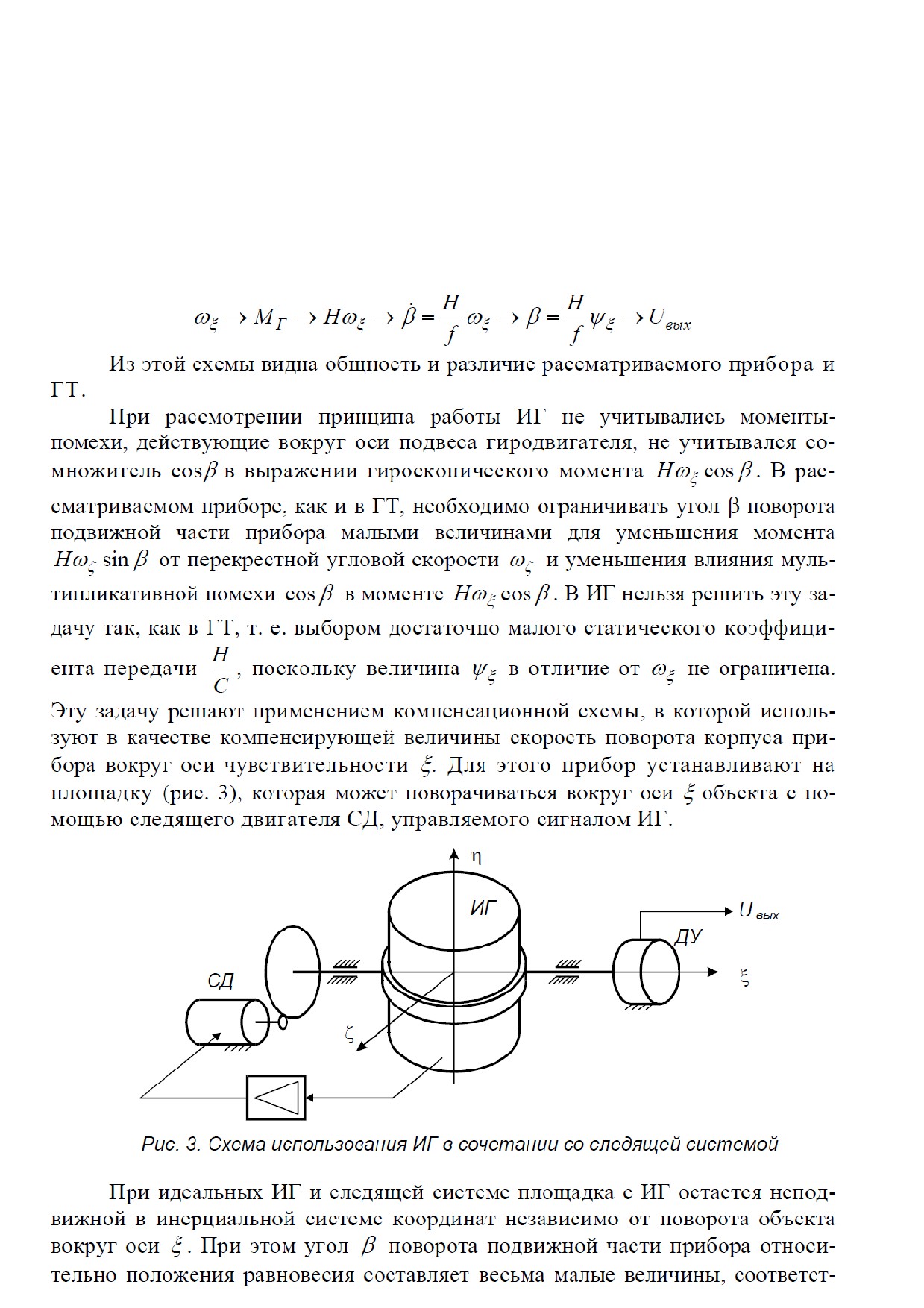
ля ИГ. Как и ГТ, ИГ реагирует на угловую скорость поворота основания вокруг
оси чувствительности. Однако выходная величина ИГ, в отличие от ГТ, про-
порциональна не входной величине, а интегралу от входной величины - при-
ращению угла поворота основания вокруг оси чувствительности. Наличие в
приборе процесса интегрирования входной величины и объясняет его название.
Схема преобразования входной величины в выходную имеет в соот-
ветствии с изложенным следующий вид

вующие динамическим погрешностям в замкнутом контуре управления сле-
дящим двигателем СД. Иначе говоря, прибор в сочетании со следящей систе-
мой работает в режиме нуль индикатора, что и определяет малость углов пово-
рота его подвижной части. Выходной сигнал, характеризующий угол
ψ
пово-
ξ
рота объекта вокруг оси ξ , снимают в этом случае с датчика угла ДУ, установ-
ленного на оси подвеса площадки.
Рассмотренная схема ИГ в сочетании со следящей системой представляет
собой одноосный гироскопический стабилизатор, в которой ИГ исполняет роль
чувствительного элемента. Возможно, однако, непосредственное применение их
в качестве чувствительных элементов системы управления объектом по угло-
вым координатам, когда сигналы ИГ управляют рулями объекта. Здесь роль
площадки стабилизатора выполняет сам подвижный объект, угловое положение
которого стабилизируется по сигналам ИГ.
При рассмотрении динамики ИГ можно в уравнении (1) не учитывать
влияние моментов-помех, поскольку в точных приборах на характер движе-
ния прибора моменты-помехи влияют мало. После отбрасывания в выражении
(1) члена Мп получим линеаризованное уравнение ИГ
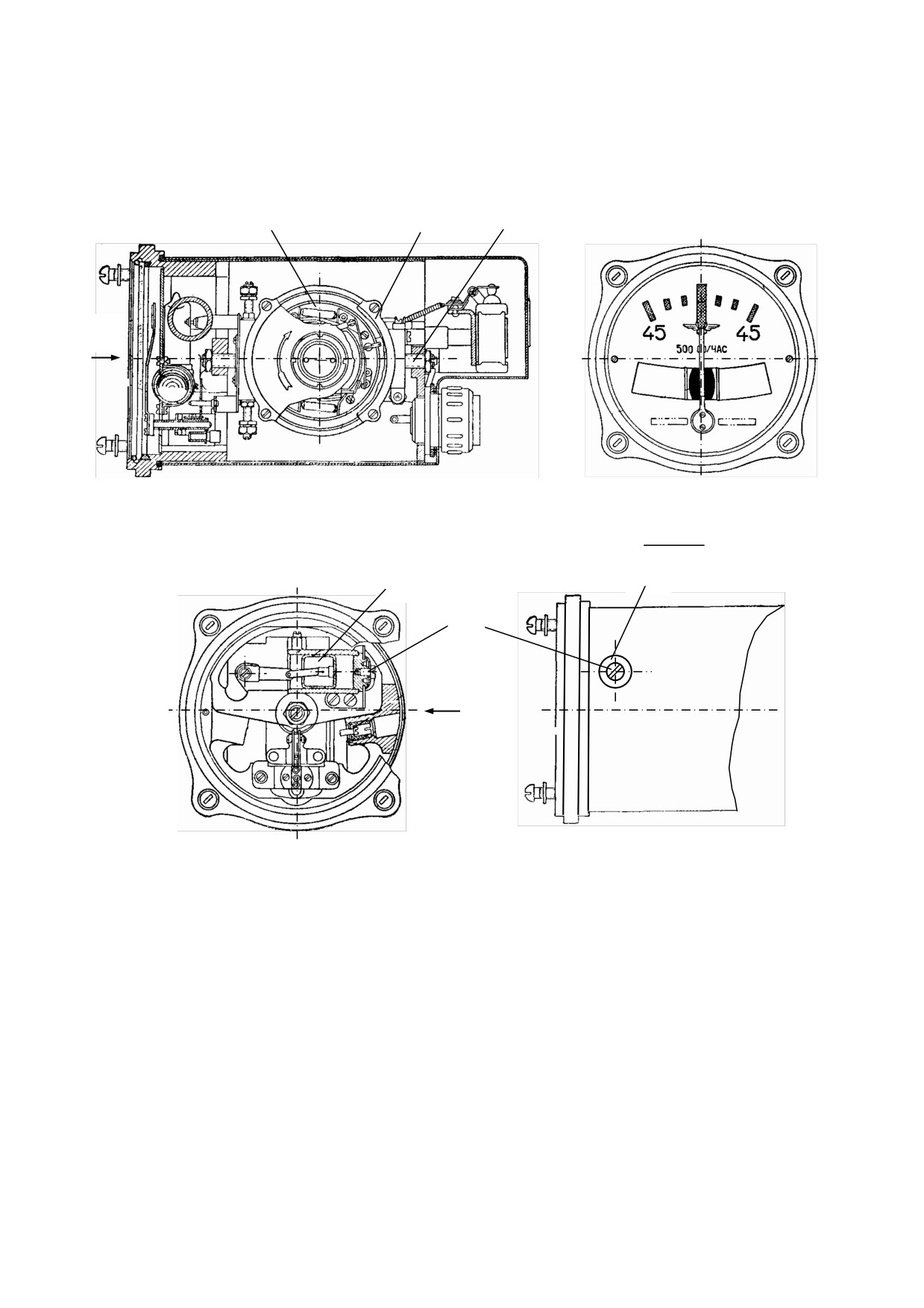
3.2 Конструкция макета интегрирующего гироскопа
В качестве объекта исследований используется лабораторный макет ИГ,
выполненный на основе электрического указателя поворота ЭУП-53 (гироско-
пического тахометра), в котором удалены пружины упругой связи.
1
2
3
А
Вид А
Вид Б
(без стекла, шкалы, стрелки)
6
4
6
Б
Рис. 5. Конструкция электрического указателя поворота ЭУП-53.
На рис.5 изображена конструкция модифицированного прибора ЭУП-53.
Ротор гироскопа I приводится во вращение двигателем постоянного тока. Якорь
двигателя механически связан с ротором. Для того, чтобы скорость вращения
двигателя была постоянной, он снабжен центробежным регулятором,. Если
скорость вращения двигателя превышает 6000 об/мин, то вследствие влияния
центробежной силы подвижный контакт центробежного регулятора отходит от
неподвижного контакта . При размыкании контактов вводится последовательно
с цепью обмотки якоря добавочное сопротивление, равное 450 0м, что приво-
дит к уменьшению тока якоря и снижению скорости вращения. В каждом из
двух параллельных ветвей якоря обмотки имеется по одному сопротивлению,
шунтируемому своими контактами.
59
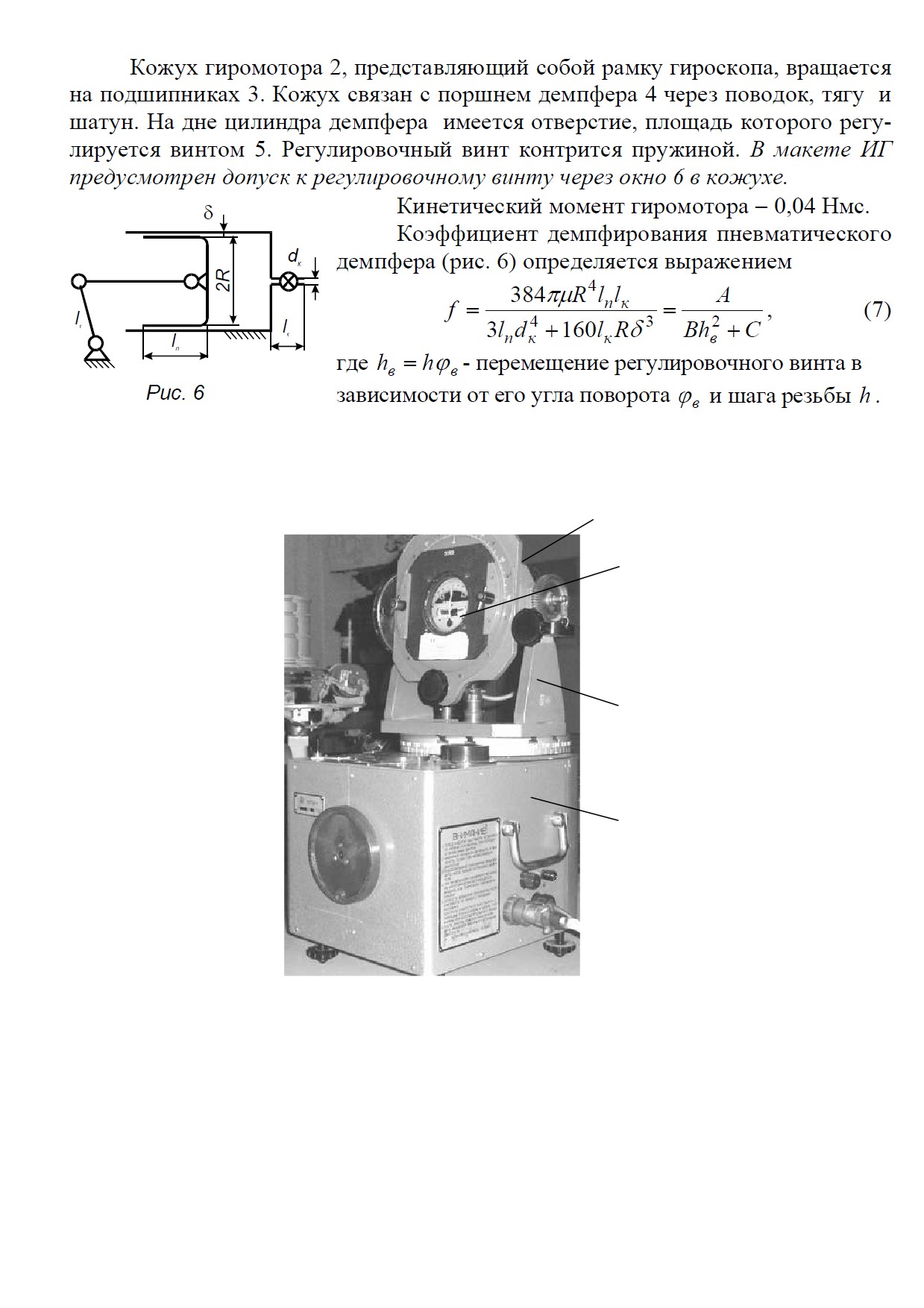
3.3 Описание лабораторной установки для исследования макета ИГ
Внешний вид лабораторной установки показан на рис. 7.
А
1
2
3
Рис. 7. Внешний вид лабораторной
установки
Макет интегрирующего гироскопа 1 установлен на кронштейне 2, позво-
ляющем разворачивать прибор на требуемые углы крена и тангажа. Кронштейн
смонтирован на поворотном столе МПУ-1 3. Углы поворота стола МПУ-1 кон-
тролируются по шкале точного отсчета с ценой деления 0,5°.
В корпусе прибора просверлено отверстие А, через которое обеспечива-
ется доступ к регулировочному винту пневматического демпфера.
60
4 Порядок проведения работы
1. Установить макет ИГ на кронштейн поворотной установки.
2. Установить регулировочный винт демпфера в исходное положение.
Для этого развернуть прибор вокруг продольной оси на угол, необходимый для
свободного доступа к отверстию в корпусе и при помощи отвертки повернуть
винт по часовой стрелке до упора.
3. Установить ось чувствительности прибора в вертикальное положение.
Поворачивая вручную стол поворотной установки против часовой стрелки до-
биться поворота стрелки прибора в крайнее положение (красная черта на шка-
ле). Зафиксировать по шкале точного отсчета угол поворота стола. Определить
коэффициент передачи прибора. Повторить опыт, поворачивая стол по часовой
стрелке.
4. Последовательно вывинчивая регулировочный винт на четверть обо-
рота повторить п.п. 2 и 3.
5. Построить график зависимости коэффициента передачи прибора от
коэффициента демпфирования.
6. Установить максимальное значение коэффициента демпфирования.
Затем Используя методику п. 4. определить коэффициент передачи прибора по-
следовательно поворачивая корпус прибора относительно продольной оси на
углы 30°, 45° и 60°.
7. Используя полученные результаты, построить зависимость коэффици-
ента передачи прибора от величины кинетического момента.
5 Содержание отчета
В отчете должны быть представлены результаты экспериментального ис-
следования макета интегрирующего гироскопа в виде графиков и таблиц, а
также кинематическая схема лабораторной установки.
6 Контрольные вопросы
1. Какие основные преимущества гидростатического подвеса?
2. Почему угол поворота подвижной части ИГ ограничен малыми углами?
3. Какая зависимость между коэффициентом передачи прибора и его по-
стоянной времени?
4. Какие достоинства ИГ как измерителя углов поворота по сравнению с
астатическим гироскопом?
5. Какие требования предъявляются к демпферу интегрирующего гиро-
скопа?
6. Для чего в ИГ используется датчик моментов.
61
Лабораторная работа № 7
АВИАГОРИЗОНТЫ
1. Цель работы
Целью данной работы является сравнительный анализ принципов дейст-
вия, назначением и конструкцией авиагоризонта АГИ-1 и дистанционного
авиагоризонта АГД-1, а также определение их основных характеристик.
2. Оборудование, измерительные приборы, инструменты.
Установка для проверки авиагоризонтов, вольтметр переменного тока,
амперметр, переменного тока, два секундомера, действующий комплект авиа-
горизонтов АГД-1 и АГИ-1, гиродатчик и указатель авиагоризонта со снятыми
кожухами.
3. Содержание работы.
Изучить принцип действия, кинематическую и электрическую схемы и
конструкцию авиагоризонтов АГИ-1 и АГД-1.
По указанию преподавателя определить следующие характеристики од-
ного из авиагоризонтов:
9 Для авиагоризонта АГИ-1:
а) время срабатывания биметаллического реле,
б) время полной готовности авиагоризонта,
в) величину угла крена, при котором выключается поперечная кор-
рекция, время восстановления главной оси гироскопа из завалов.
9 Для авиагоризонта АГД-1:
а) время разгона гиромотора;
б) время арретирования;
в) скорость продольной и поперечной коррекции;
г) точность измерения крена и тангажа:
д) угол срабатывания ламельного отключателя коррекции.
4 Общие сведения
Принцип действия авиагоризонта (гировертикали) основан на исполь-
зовании свойств гироскопа с тремя степенями свободы, у которого глав-
ная ось вращения расположена вертикально.
С помощью авиагоризонтов можно визуально определять углы крена
и тангажа самолета, а, следовательно, и положение самолета относительно
плоскости горизонта. Известно, что главная ось трехстепенного гироскопа
стремится удержать неизменным свое первоначальное положение в иници-
альном пространстве. Для того, чтобы гироскоп мог служить гировертика-
лью, необходимо, чтобы его главная ось удерживала неизменным свое перво-
начальное (вертикальное) положение не относительно инициального про-
странства, а относительно Земли. Выполнить эту задачу можно только, при
62

наличии направляющей силы, которая способна восстанавливать нарушен-
ное вертикальное направление главной оси гироскопа.
Для удержания главной оси гироскопа в направлении истинной вер-
тикали в авиагоризонтах в настоящее время применяются системы коррек-
ции, чувствительным элементом которых является маятник (обычно жид-
костный маятниковый переключатель), а исполнительными механизмами
служат коррекционные двигатели, создающие необходимые моменты на осях
карданного подвеса, под действием которых возникает прецессия оси ротора
гироскопа, восстанавливающая ось в вертикальное положение.
При наличии ускорений ось ротора начинает прецессировать к на-
правлению "кажущейся вертикали", определяемой равнодействующей уско-
рения объекта и ускорения свободного падения, вызывая таким образом по-
грешность в показаниях авиагоризонта.
Для того чтобы уменьшить погрешность авиагоризонта при наличии
ускорений, маятниковая поперечная коррекция во время виражей самолета от-
ключается при помощи специальных устройств. В авиагоризонте АГД-1 маят-
никовая коррекция отключается также и при наличии продольных ускорений.
Скорость прецессии оси ротора гироскопа под действием коррекци-
онного момента выбирают обычно в пределах 1 − 5 град/мин. Эта скорость, с
одной стороны, достаточно мала, чтобы обеспечить устойчивость гиро-
вертикали при наличии кратковременно действующих ускорений качки и
вибраций, а с другой стороны, достаточно велика, чтобы обеспечить скорость
прецессии, несколько превышающую скорость "ухода" гироскопа.
Система отсчета углов крена и тангажа, принятая в авиации, представ-
лена графически на рис. 1, где: хс − продольная ось самолета, ус − нор-
мальная (вертикальная) ось самолета, zс − поперечная ось самолета, О -
центр тяжести самолета, Oξηζ − опорная (Земная) систем координат.
Истинный угол тангажа θ представляет собой угол наклона продоль-
ной оси самолета к плоскости горизонта, а истинный угол крена γ - это угол
поворота самолета вокруг его продольной оси, отсчитываемый между
нормальной осью самолета и ее проекцией на вертикальную плоскость, прохо-
дящую через продольную ось самолета.
θ
ζ
yc
γ
I
II
xc
θ
I
I
II
II
ξ
ψ
η
ψ
γ
I
II
а)
б)
zc
Рис. 1. Отсчет истинных углов
Рис. 2. расположение гироскопа авиагоризонта
тангажа θ и крена γ самолета
на самолете
63

Гироскоп авиагоризонта можно устанавливать на самолете так (рис. 2),
чтобы ось вращения его внешней рамки I - I располагалась либо параллельно
продольной (2а), либо параллельно поперечной (2б) осям самолета. В первом
случае (рис. 2а) относительно оси I -1 наружной рамки можно снимать ис-
тинные углы крена самолета, так как эта ось связана о продольной осью са-
молета, а относительно оси П - П -истинные углы тангажа, так как она гори-
зонтальна. Во втором случае (рис. 2б) относительно оси I - I углы тангажа не
будут соответствовать истинным, потому что ось I -I не сохраняет горизон-
тального положения при кренах самолета, относительно оси II - II углы крена
также не будут соответствовать истинным, так как ось II - II не связана с про-
дольной осью и при наличии тангажа остается горизонтальной.
На самолетах-истребителях во время выполнения фигур высшего
пилотажа ось ротора гироскопа может совместиться с осью внешней рамки,
что приведет к потере одной степени свободы, а, следовательно, и к наруше-
нию нормальной работы авиагоризонта. Для исключения совмещения осей в
рассматриваемых авиагоризонтах угол между осью кардановой (внешней) рам-
ки и осью ротора гироскопа автоматически выдерживается равным 90° при
любых эволюциях самолета.
Это достигается благодаря наличию в них дополнительной (следящей)
рамки, к которой на шарикоподшипниках подвешена карданная рамка вместе
с гироузлом. Авиагоризонты, выполненные по такой схеме, называют невыби-
ваемыми вертикалями.
4.1 Авиагоризонт самолета-истребителя АГИ-1
Авиагоризонт истребителя АГИ-1 предназначен для выдачи визуальной
информации о крене и тангаже самолета. Функциональная схема авиагоризонта
изображена на рис. 3.
Кардановая рамка 2 размещена в
следящей рамке 3. На кардановой рамке
расположен выключатель 4, контакты 5
которого связаны с гироузлом
1. Вы-
ключатель 4 с контактом 5 является
чувствительным элементом, реаги-
рующим на нарушение перпендику-
лярности между осью ротора и осью
II
- II при кренах самолета и вклю-
чающим электродвигатель отработки 6
для восстановления перпендикулярно-
сти осей. Скорость отработки следящей
Рис. 3. Схема авиагоризонта АГИ-1
рамки значительно превышает макси-
мальную угловую скорость вращения
самолета по крену, что обеспечивает сохранение перпендикулярности осей во
время любых эволюций самолета.
Сферическая шкала 8, связанная с гироузлом, удерживается гироскопом в
определенном положении относительно плоскости горизонта. Корпус прибо-
64

ра, в месте с ним и силуэт самолетика 7, связанный с корпусом, при эволю-
циях самолета меняют свое положение относительно плоскости горизонта,
а, следовательно, и относительно сферической шкалы 8. Таким образом,
пользуясь шкалой кренов, нанесенной на лицевой части корпусе прибора, сфе-
рической шкалой 8 и силуэтом самолетика 7, как индексом, можно измерять
углы крена и тангажа самолета.
Угол крена измеряется как угол поворота корпуса прибора вокруг
оси I - I, расположенной параллельно продольной оси самолета. Угол тан-
гажа измеряется как угол поворота корпуса прибора вокруг оси II - II, рас-
положенной в плоскости горизонта, так как ось II - II стабилизируется в го-
ризонтальной плоскости при помощи следящей рамки 3. Следовательно, авиа-
горизонт АГИ-1 измеряет истинные углы крена и тангажа.
На рис. 4 изображена конструктивная схема АГИ-1.
Гироузел 1 с жидкостным маятниковым переключателем (на схеме не
показан) подвешен на шарикоподшипниках в кардановой рамке 4. На оси
гироузла укреплена сферическая шкала 6, выключатель 5 отработки перпен-
дикулярности осей и ротор электродвигателя 2 продольной коррекции.
Статор этого электродвигателя расположен на рамке 4, которая подвешена
на шарикоподпгипниках в следящей рамке 7.
Рис. 4. Конструктивная схема АГИ-1
Статор электродвигателя 3 поперечной коррекции смонтирован в сле-
дящей рамке 7, а ротор его закреплен на внешней рамке 4. Следящая рамка,
подвешенная в корпусе, опирается своей передней частью на три опорных
подшипника 8 и задней частью - на один радиальный шарикоподшипник.
Электродвигатель отработки 11 укреплен на корпусе прибора и связан со
следящей рамой через редуктор с передаточным отношением 1:16,3. В
задней части прибора на оси следящей рамы укреплен выключатель 15
коррекции на виражах. Для сокращения времени запуска прибора исполь-
зуется механизм пусковой кнопки 10; при нажатии на кнопку 10 усилие
65

через подшипник передается на торцевую честь следящей рамы, выпол-
ненную в виде кулачка 9. Профиль торцевого кулачка подобран таким об-
разом, чтобы следящая рама из любого произвольного положения могла
быть установлена в нормальное горизонтальное положение.
К кардановой раме снизу на кронштейне подвешен пусковой маятник, не
позволяющий кардановой раме переворачиваться после выключения питания.
Перемещение силуэта самолета в вертикальной плоскости осуществ-
ляется механизмом 13, рукоятка которого расположена в левой части перед-
него фланца корпуса.
Отсчет углов крена производится по шкале 14, отсчет углов тангажа -
по сферической шкале 6.
На сферической шкале нанесена оцифровка для отсчета углов тангажа
в пределах 0 -360°. Точность измерения углов крена уменьшается по мере
увеличения угла тангажа. При отвесном пикировании или кабрировании
продольная ось самолета совпадает с направлением главной оси гироскопа, и
авиагоризонт теряет чувствительность к углам крена. Практически при пики-
рования иди кабрирования с углами тангажа около 80° - 90° угол крена по авиа-
горизонту контролировать нельзя.
Электрическая схема авиагоризонта АГИ-1 представлена на рис. 5.
Гиромотор 1 типа ГМ-4 питается трехфазным переменным током
напряжением 36 вольт и частотой 400 Гц через клеммы А, Б, В. Обмотки
возбуждения электродвигателей 3 и 4 продольной и поперечной коррекции
включены последовательно в фазы электродвигателя гироскопа, что обеспе-
чивает форсированный режим роботы этих двигателей при запуске прибора.
Рис. 5. Электрическая схема АГИ-1
Обмотка возбуждения электродвигателя 6 отработки следящей рамки
включена между А и В. Средняя точка управляющих обмоток присоеди-
нена к клемме А. Концы управляющих обмоток подведены к включателю 5.
Контакт включателя, связанный с корпусом гиромотора, присоединен к
66
клемме Б и подает напряжение на первую или вторую управляющие обмотки
электродвигателя 6 в зависимости от того, в какую сторону отклонилась ось
внешней рамки от перпендикулярного положения к оси ротора авиагори-
зонта.
Коммутатор 7, расположенный на оси внешней рамки, переключает
концы управляющих обмоток электродвигателя 6 в том случае, когда угол
тангажа становятся больше 90°, обеспечивая правильное направление отра-
ботки двигателя 6 при положении самолета вверх колесами.
Балластное сопротивление 10 (800-430 ом) ограничивает скорость пре-
цессии гироскопа в продольном направлении до 3-5,5 град/мин. При темпера-
турах ниже -35°С это сопротивление замыкается биметаллическим включа-
телем 11 и ускоряет запуск прибора в условиях низких температур.
Выключатель коррекции 12, жестко связанный с осью следящей рамы,
состоят из двух колец 17 и 18. Кольцо 17 состоит из двух рабочих секторов 17а и
17б и двух холостых секторов. Рабочие секторы 17а и 17б электрически связа-
ны с кольцом 18. С кольцом 17 контактируют щетки 19, закрепленные на кор-
пусе (на задней крышке) прибора; с кольцом 18 контактирует щетка 20, также
закрепленная на корпусе. Отвод 21 связывает рабочие секторы кольца 17 к
кольцу 18 со средней точкой управляющих обмоток электродвигателя попе-
речной коррекции.
При горизонтальном полете щетки 19 находятся на рабочих секторах
17а и 17б, фаза Б подается на среднюю точку управляющих обмоток электро-
двигателя поперечной коррекции 4 и он корректирует гироскоп.
При вираже с креном более 13° щетки 19 сходят с рабочих секторов 17а и 176;
цепь питания управляющих обмоток разрывается и коррекция выключается.
Во время пуска прибора происходят колебания следящей рамы и
щетки 19 могут сходить с рабочих секторов 17а и 17б выключателя коррек-
ции. Для надежной работы электродвигателя поперечной коррекции при пуско-
вом режиме выключатель коррекции 12 при запуске прибора блокируется би-
металлическим реле времени 14, контакты которого включены параллельно
выключателю коррекции. В это время управляющие обмотки электродвигате-
ля 4 поперечной коррекции присоединяются к клемме Б через замкнутые кон-
такты реле 14 независимо от начального положения гироузла и величины угла
крена. Через 40 − 150 сек. после включения прибора нагревательный элемент 15
вызывает деформацию одной из биметаллических пластин реле 14 и размыкает
контакты, прекращая тем самым блокировку выключателя системы коррекции и
переводя авиагоризонт из пускового на рабочий режим.
Балластное сопротивление 16 (100 ом) ограничивает скорость прецессии
в поперечном направлении до 3,5 - 7 град/мин. Сопротивление 13 (5,1 кОм)
является искрогасящим сопротивлением в цепи щеток 13 и рабочих секторов
17а и 17б выключателя коррекции.
67

4.2 Дистанционный авиагоризонт АГД-1
Дистанционный авиагоризонт АГД-1 предназначен для выдачи электриче-
ских сигналов крена и тангажа всем потребителям на самолете, а также для на-
глядного показания положения самолета относительно горизонта. Он состоит
из двух основных агрегатов - гиродатчика и указателей.
В связи с использованием дистанционной передачи выходных сигналов
гиродатчик может быть установлен в любом месте самолета, подходящем с
точки зрения удобства монтажа и получения хорошей точности измерения (це-
лесообразно располагать его ближе к центру тяжести самолета).
Авиагоризонт АГД-1 имеет следующие особенности конструкции:
а) в отличие от АГИ-1 в нем осуществляется отключение поперечной
коррекции при разворотах с угловой скоростью более 0,1...0,3 град/с и отклю-
чение продольной коррекции при постоянном продольном ускорении более
1,67 м/с2. Этим достигаются малые размеры после виражных погрешностей
авиагоризонта и погрешностей после разгона или торможения самолета;
б) как и в АГИ-1 в нем выдерживается перпендикулярность оси ротора
гироскопа и оси наружной рамки за счет использования дополнительной сле-
дящей рамки; этим достигается "невыбиваемость" гиродатчика при выполне-
нии самолетом любых эволюций;
в) в отличие от АГИ-1 авиагоризонт АГД-1 позволяет одновременно вы-
давать электрические сигналы, пропорциональные углам крена и тангажа раз-
нообразном потребителям, имеющимся на самолете: автопилоту, курсовой
системе, радиолокационной станции и т.д.
Электрокинематическая схема дистанционного авиагоризонта АГД-1
изображена на рис. 6, а принципиальная схема гиродатчика - на рис. 7.
Рис. 6. Электрокинематическая схема авиагоризонта АГД-1
Расположение осей ротора и рамок гировертикали АГД-1 аналогично рас-
положению их в авиагоризонте АГИ-1. Ось ротора 1 (рис. 6) удерживается в
вертикальном положении, ось внутренней рамки 2 направляется параллельно
68
продольной оси самолета, ось внешней рамки 3 направляется перпендикулярно
к оси ротора с помощью дополнительной следящей рамки, ось которой, в свою
очередь, также направляется параллельно продольной оси самолета.
Перпендикулярность оси внешней рамки к оси ротора гироскопа осуще-
ствляется с помощью следящей системы, состоящей из трансформаторного
датчика угла 31, усилителя 5 и двигателя-генератора 6 типа ДГ-1.
Если при наклоне самолета по углу крена внешняя рамка вместе со сле-
дящей рамкой повернется вслед за самолетом, то с трансформаторного датчика
угла снимается электрический сигнал, пропорциональный углу отклонения оси
внешней рамки от перпендикуляра к оси ротора гироскопа. Этот сигнал усили-
вается в усилителе и подается на двигатель-генератор 6, который через редук-
тор поворачивает следящую рамку до тех пор, пока ось внешней рамки не ста-
нет перпендикулярной к оси ротора гироскопа.
Таким образом, при любых эволюциях самолета ось ротора гироскопа не
совпадает с осью наружной рамки и гиродатчик приобретает свойство "невы-
биваемости", т.е. способность выдавать правильные показания после выполне-
ния фигур высшего пилотажа.
Для демпфирования колебаний следящей рамки используется сигнал та-
хометрической обратной связи. Этот сигнал подается на вход усилителя в про-
тивофазе с сигналом трансформаторного датчика угла.
Для обеспечения правильного направления отработки двигателем-
генератором следящей рамки при углах тангажа самолета больше 90° фаза
управляющего сигнала трансформаторного .датчика угла переключается с по-
мощью коммутатора 7 (на рис. 7 - коммутатор К1), расположенного на оси на-
ружной карданной рамки.
Из-за наличия коммутатора следящая рамка имеет два рабочих положе-
ния относительно оси ротора гироскопа - основное, в которое она устанавлива-
ется системой электромеханического арретира, и перевернутое (на 180°). При
обеих системах обеспечивается нормальное слежение дополнительной рамки за
осью гироскопа.
Сигналы крена и тангажа выдаются плоскими сельсинами типа 573. Сель-
син-датчик тангажа 14 расположен на оси наружной карданной рамки, сельсин-
датчик крена 15 - на оси следящей рамки.
Так как сельсин-датчик крена измеряет углы рассогласования между кор-
пусом прибора (самолета) и непрерывно отрабатываемой в плоскость горизонта
следящей рамкой, при эволюциях самолета сельсин-датчик выдает сигналы
крена с динамическими ошибками, равными динамическим погрешностям сис-
темы стабилизации следящей рамки. Например, при скорости изменения крена
60 град/с динамическая ошибка составляет примерно 1°.
После выполнения самолетом эволюции с углами тангажа, близкими к
90°, следящая рамка может принять перевернутое положение. При переверну-
том положении следящей рамки нулевое положение ротора сельсина крена 15
относительно статора изменяется на 180°; нулевое положение ротора сельсина
тангажа относительно статора также изменяется на 180°, кроме того, направле-
ние поворота ротора сельсина тангажа относительно статора при изменении
тангажа меняется на обратное.
69

Рис. 7. Принципиальная схема гиродатчика АГД-1
Для обеспечения правильности показаний указателя АГД-1 при перевер-
нутом положении следящей рамки гиродатчика сигналы сельсина крена и тан-
гажа коммутируется.
Сигнал коммутации выдается коммутатором 25 (рис.6) (К2 на рис. 7), рас-
положенным на оси наружной карданной рамки. При основном положении сле-
дящей рамки контакты коммутатора разомкнуты, при перевернутом - замкнуты.
Коммутация сигналов осуществляется реле Г и Р в гиродатчике (рис. 7) и
О в указателе после подачи на них сигналов с коммутатора.
Реле Р коммутирует роторные концы сельсина-датчика крена 15, реле Г -
статорные концы сельсина-датчика тангажа 14. Реле О коммутирует концы ро-
торных обмоток сельсина-приемника тангажа в указателе.
Система коррекции авиагоризонта АГД-1 состоит из дистанционных
электролитических уровней (двухосного жидкостного маятникового переклю-
чателя типа ЖМП либо двух одноосных типа ДЖМ-9Б) и двух асинхронных
коррекционных двигателей.
Для повышения точности показаний авиагоризонта АГД-1 в его гиродат-
чике предусмотрено отключение как поперечной, так и продольной коррекции
гироскопа.
Отключение поперечной коррекции производится при разворотах с помо-
щью ламельного отключателя коррекции, включенного последовательно с кон-
тактами серийного выключателя коррекции ВК. Такое дублирование предусмот-
рено в связи с тем, что при больших скоростях полета нередко развороты произ-
водятся с угловой скоростью, меньшей порога чувствительности выключателя
коррекции ВК (прибор ВК-53РБ). Например, при скорости полета 1100 км/ч ла-
мельный отключателъ, срабатывающий при углах крена ±10°, может отключать
коррекцию раньше, чем ВК. Кроме того, установлено, что у отдельных типов са-
молетов на некоторых режимах полета наблюдается рысканье самолета вокруг
вертикальной оси с небольшой амплитудой, но такое рысканье при разворотах
приводит к увеличению времени задержки срабатывания ВК, а следовательно, и
к увеличению после виражных погрешностей авиагоризонта. В этих случаях
также полезно наличие ламельного отключателя коррекции, конструкция кото-
рого аналогична конструкции отключателя в авиагоризонтах АГИ.
Отключение продольной коррекции осуществляется жидкостным отклю-
чателем 13, установленным на корпусе гиромотора авиагоризонта так, что он
реагирует на горизонтальную составляющую продольного ускорения самолета.
Жидкостный отключатель (рис. 8) представляет два герметически закры-
тых цилиндрических сосуда (трубочки), заполненных токопроводящей жидко-
стью (остается только небольшой воздушный пузырек). Трубочки симметрично
наклонены на некоторый угол к горизонтальной плоскости. В нижней части
каждой из трубочек расположены два контакта.
При отсутствии продольного ускорения оба контакта в каждой из трубо-
чек находятся в жидкости и цепь продольной коррекции включена, обеспечивая
выбранную скорость коррекции (рис. 8а). При разгоне или торможении самоле-
та жидкость в полостях отключателя перемещается в сторону, противополож-
ную направлению действия ускорения, и пузырек воздуха перекрывает контак-
ты одного из отключателей. При ускорении более 1,67 м/с2 (что соответствует
71

отклонению кажущейся вертикали от истинной приблизительно на 9,5°) проис-
ходит резкое увеличение сопротивления электрической цепи отключателя, а
скорость продольной коррекции резко падает - продольная коррекция практи-
чески отключается в течение времени действия ускорения.
W
1
2
1
2
а)
б)
Рис. 8. Схема отключателя продольной коррекции
Обратное срабатывание (включение) жидкостного отключателя происходит
при уменьшении ускорения до значения приблизительно в 1,05 м/с2 , что соответ-
ствует отклонению кажущейся вертикали от истинной приблизительно на 6°.
Для быстрого приведения авиагоризонта АГД-1 в рабочее положение в
гиродатчике предусмотрен электромеханический арретир. Кинематическая
схема арретирующего механизма изображена в верхней части рис. 9.
8
9
10
11
12
13
7
6
5
4
3
2
1
Рис. 9. Кинематическая схема арретирующего механизма
При подаче питания на гиродатчик подается постоянное напряжение на
двигатель 1 (М на рис. 7) арретирующего механизма, который начинает вра-
щаться и через редуктор 2 и шариковую винтовую передачу перемещает шток,
который, не вращаясь, выдвигается вдоль своей оси по направляющей втулке.
На конце штока помещается ролик 13. Вначале шток через ролик нажимает на
торцовый кулачок 12, расположенный по окружности на плате следящей рамки.
Профиль кулачка 12 образует две симметричные ветви винтовой линии. При
нажатии ролика 13 на кулачок 12 следящая рамка поворачивается в рабочее по-
ложение, при котором ось внешней рамки параллельна поперечной оси самоле-
та. Затем ролик соскальзывает с рабочей поверхности кулачка в отверстие ло-
вителя и начинает нажимать через стержень 11 и рабочую пружину 10 на тол-
катель 9, снабженный косым кулачком 8 и концевым выступом 6. Выступ 6 на-
жимает на кулачок 7, посаженный на ось внешней рамки, и создает таким обра-
зом момент вокруг оси внешней рамки. Под действием этого момента гироскоп
будет прецессироватъ вокруг оси внутренней рамки. В это время внешняя рам-
72
ка и кулачок на ее оси не поворачиваются, а шток 3 и толкатель 9 не переме-
щаются. При этом фрикционная муфта редуктора 3 начинает проскальзывать, а
двигатель 1 продолжает вращаться.
Прецессия гироскопа вокруг оси внутренней рамки будет продолжаться
до тех пор, пока гироузел не дойдет до упора. После этого дальнейший поворот
гироскопа вокруг оси внутренней рамки прекратится и гироскоп начнет пово-
рачиваться вокруг оси внешней рамки до тех пор, пока выступ 9 не войдет в
вырез (ловитель) кулачка 7 и не зафиксирует, таким образом, внешнюю рамку
так, чтобы ось внутренней рамки стала параллельна продольной оси самолета.
При этом косой кулачок 8 нажимает на стержень 4 и через него − на кулачок 5,
расположенный на оси внутренней рамки. Приложение момента к оси внут-
ренней рамки вызовет вращение гироскопа вокруг этой оси, так как у гироско-
па осталось лишь две степени свобода. Вращение гироскопа вокруг оси внут-
ренней рамки будет происходить до тех пор, пока стержень 9 не войдет в вырез
кулачка 5 и не зафиксирует ось ротора гироскопа в положении, параллельном
нормальной оси самолета. Этим оканчивается цикл арретирования, который
совершается за один оборот выходной шестерни редуктора и связанного с ней
ведущего пальца. После этого ведущий палец попадает в продольную канавку
штока 3, который под действием возвратной пружины 10 и пружины, располо-
женной внутри штока, быстро откидывается в исходное положение, ударяясь о
резиновый буфер.
Описанный процесс арретирования будет иметь место в том случае, ко-
гда гиромотор вращается. При запуске гировертикали обеспечивается аррети-
рование рамок с невращающимся ротором. В этом случае вращение рамок под
действием моментов сил по их осям совершается как вращение обычного твер-
дого тела, что ускоряет процесс арретирования. Коммутация питания цепей
гировертикали при запуске осуществляется с помощью группы реле и конце-
вых выключателей. Важно отметить, что в начале движения штока арретира
концевой выключатель ВК1 разрывает цепь обмотки возбуждения двигателя
следящей рамки. Этим исключается противодействие работе механизма арре-
тирования со стороны системы отработки следящей рамки даже во время по-
дачи переменного напряжения в цепи переменного тока гировертикали.
В конце цикла арретирования срабатывает концевой выключатель ВК2, по-
сле чего переменное напряжение подается к гиромотору, системе коррекции,
трансформаторному датчику угла и сельсинам-датчикам. Ротор гироскопа разго-
няется, а система коррекции после освобождения рамок гировертикали от аррети-
ра приводит ось ротора к вертикальному положению. Разгон ротора и приведение
оси ротора к вертикальному положению осуществляются в течение 1 мин.
Для арретирования гировертикали в полете нажимается кнопка в указа-
теле с надписью "Арретирование только гориз. полете". В дальнейшем цикл арре-
тирования и коммутация цепей осуществляются так же, как и при запуске.
Указатель горизонта (см. рис. 6) имеет две следящие системы: следящую
систему тангажа, и следящую систему крена. Первая разворачивает картушку
30 со шкалой тангажа 20 на ±145°, вторая поворачивает силуэт самолетика 31
на 360°. На шкале тангажа нанесены деления через 5° и оцифровка их через 10°.
На шкале крена 21, находящейся на лицевой стороне корпуса указателя, нане-
сены деления через 5° и оцифровка их через 15°. Отсчет угла тангажа осущест-
вляется с помощью нулевого индекса − белой точки 19, находящейся в центре
73
силуэта самолетика, а отсчет угла крена − с помощью конца крыла силуэта са-
молета. Для наглядности верхняя половина картушки выкрашена в голубой
цвет а нижняя − в коричневый. Таким образом, показания крана и тангажа даны
раздельно. Этим индикация горизонта в авиагоризонте АГД-1 существенно от-
личается от индикации в авиагоризонте АГИ.
Следящая система тангажа состоит из сельсина-приемника 17, усилителя
14, двигателя-генератора 16 типа ДГ-0,5 и редуктора 18, связывающего двига-
тель-генератор, с одной стороны, с картушкой, а с другой − с ротором сельсина-
приемника. При изменении угла тангажа самолета вектор результирующего
магнитного потока в статоре сельсина-приемника поворачивается на угол тан-
гажа, что приводит к появлению в роторе сельсина-приемника электродвижу-
щей силы. Последняя усиливается в усилителе и подается на двигатель-
генератор. Двигатель поворачивает ротор сельсина-приемника также на угол
тангажа и устраняет рассогласование в сельсине-приемнике. Одновременно
двигатель поворачивает картушку. Передаточное число от двигателя к картуш-
ке в 1,7 раза больше передаточного числа от двигателя к сельсину-приемнику.
Поэтому угол поворота картушки в 1,7 раза больше угла поворота самолета.
Этим достигается повышение точности фиксации угла тангажа.
При равенстве угла тангажа 90° коммутатор 25 (коммутатор К2 на рис. 7)
замыкает цепь реле Г и Р. Контакты реле Г изменяют порядок чередования двух
фаз у сельсина-датчика СДТ. Поэтому при дальнейшем изменении угла тангажа
в прежнем направлении изменяется на противоположное направление враще-
ния магнитного потока в статоре сельсина-приемника СПТ. Благодаря этому
происходит поворот картушки в обратном направлении. Переключение фаз в
коммутаторе сельсина-приемника происходит тогда, когда ЭДС не переклю-
чаемой фазы статора сельсина-приемника равна нулю. Поэтому направление
результирующего магнитного потока в статоре сельсина-приемника в этот мо-
мент изменяется на 180°. Чтобы картушка не повернулась на 360° (это соответ-
ствует изменению угла тангажа на 180°), одновременно переключаются концы
в роторе сельсина-приемника. Одновременно переключаются концы обмоток в
роторе сельсина-датчика крена СДК. Это приводит к изменения на 180° направ-
ления магнитного потока в статоре сельсина-приемника крена и быстрому по-
вороту на 180° силуэта самолетика.
С помощью кремальеры 30 (см. рис. 6) можно поворачивать статор сельси-
на-приемника тангажа. При этом поворачивается шкала тангажа. Кремальера
29 используется для установки нулевого деления шкалы тангажа против нуле-
вой точки силуэта самолетика при изменении установившегося угла тангажа в
горизонтальном полете.
Следящая система крена, состоящая из сельсина-приемника 26, усилителя
27, двигателя генератора 28 и редуктора 29, аналогична следящей системе тан-
гажа. Она через редуктор поворачивает выходную шестерню, на которой рас-
положен силуэт самолетика 17.
74
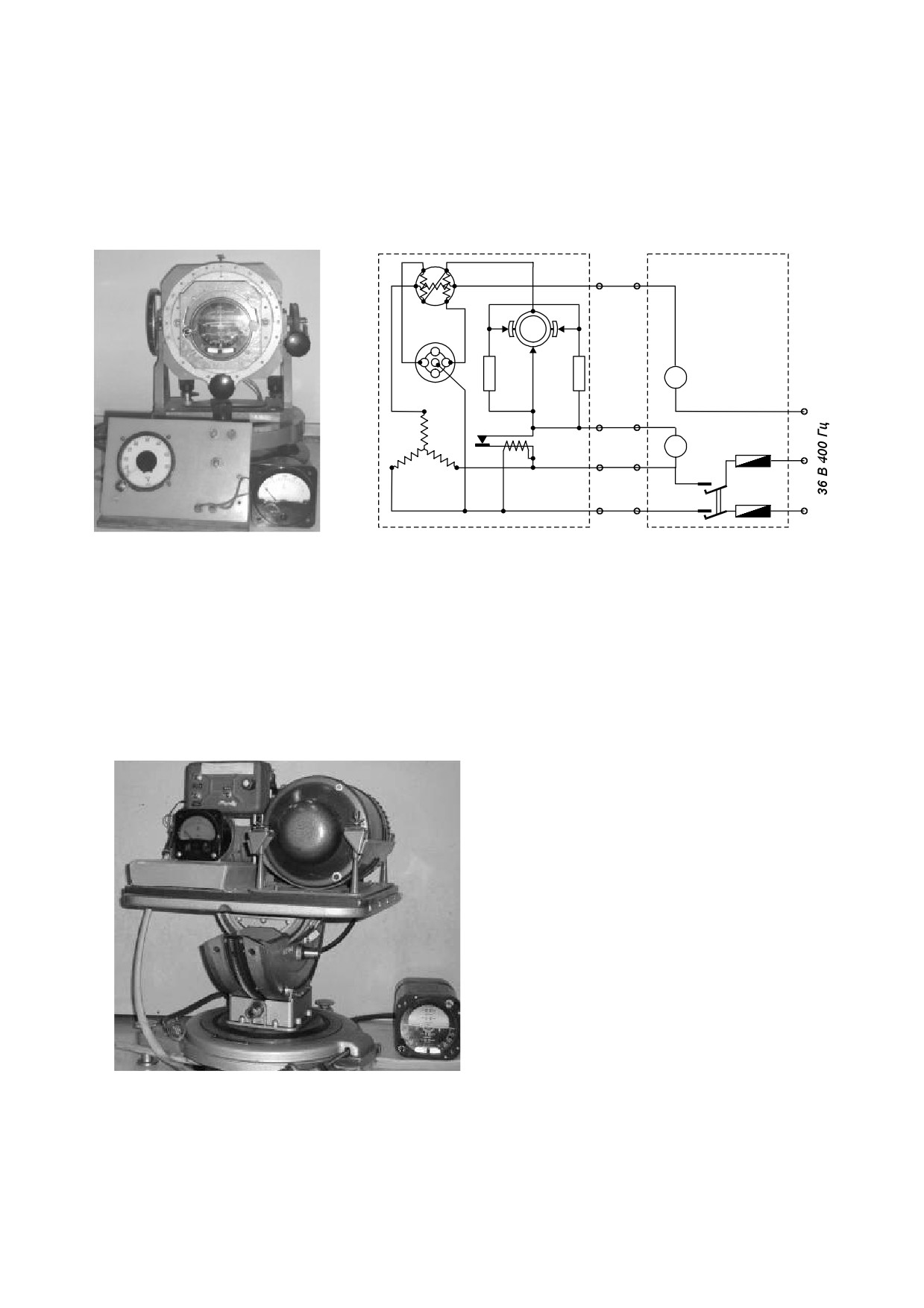
4.3 Описание лабораторной установки
4.3.1 Установка для проверки АГИ-1
Лабораторная установка для проверки АГИ-1 (рис. 10) включает иссле-
дуемый авиагоризонт и пульт управления.
Авиагоризонт АГИ-1 установлен на кронштейне, позволяющем задавать
АГИ-1
Пульт
4
А
управления
12
2
13
16
А
1
Г
15
V
14
В
К
Б
Рис. 10. Лабораторная ус-
Рис. 11. Электрическая схема лабораторной
тановка для проверки АГИ-1
установки
требуемые углы крена и тангажа. Кронштейн установлен на столике.
К пульту управления подключен амперметр, измеряющий силу тока в одной
из обмоток гиромотора. Электрическая схема установки показана на рис 11.
4.3.2 Установка для проверки АГД-1
Лабораторная установка для проверки АГД-1 (рис. 12) включает гиродатчик
авиагоризонта, выключатель коррекции ВК-53РБ и указатель горизонта.
Рис. 12. Установка для про-
верки авиагоризонта АГД-1
Гиродатчик, выключатель коррекции и пульт управления установлены на
двухосном поворотном столе КПА-5. Указатель горизонта располагается на ла-
бораторном столе. Связь между гиродатчиком и указателем горизонта осуще-
ствляется с помощью кабеля.
75
5 Порядок проведения работы
5.1 Проверка комплекта авиагоризонта АГД-1
1. Отгоризонтировать положение гиродатчика по уровням поворотного сто-
ла и уровню гиродатчика.
2. Подготовить секундомер. Включить питание авиагоризонта. Следя за по-
казаниями амперметра и секундомера, через каждые 10 с записывать значение
пускового тока до тех пор, пока не установится постоянный рабочий ток. За-
фиксировать момент времени удара штока арретира о резиновый буфер.
3. Измерить скорость поперечной коррекции. Для измерения скорости кор-
рекции нажать кнопку в указателе с надписью "Арретирование только гориз. поле-
те", затем отклонить стол с гиродатчиком в заарретированном положении на
угол крена 10...15°, после чего отпустить кнопку на указателе и вернуть стол в
исходное положение. Замерить скорость поперечной коррекции.
4. Измерить скорость продольной коррекции. Для этого, используя методи-
ку п. 3, повторить измерения, задав начальное отклонение стола по углу крена.
5. Определить точность измерений углов крена и тангажа. Для этого снять
статические характеристики измерений не менее чем в десяти точках. Опреде-
лить абсолютные погрешности измерений в этих точках. По этим данным рас-
считать значения математического ожидания и средне квадратической погреш-
ности измерений.
6. Путем отключения питания проверить работу сигнализатора отказа.
5.2 Проверка авиагоризонта АГИ-1
1. Подготовить лабораторную установку к проверке авиагоризонта. Для
этого:
− Закрепить авиагоризонт в кронштейне и установить его в поло-
жение, соответствующее горизонтальному полету по шкалам крон-
штейна, по указателю скольжения авиагоризонта и по уровню, находя-
щемуся на столике.
− Установить силуэт самолетика против неподвижных горизон-
тальных индексов.
− Нажать и опустить пусковую кнопку; при этом линия меридиа-
на сферической шкалы прибора должна примерно совместиться с нуле-
вой отметкой шкалы крена.
2. Определить время срабатывания биметаллического реле авиагори-
зонта, время разгона гироскопа и время полной готовности авиагори-
зонта. Определение времени срабатывания биметаллического реле и
времени полной готовности авиагоризонта производятся одновременно.
Для этого:
− Подготовив два секундомера, одновременно включить питание
на авиагоризонт и оба секундомера.
76
− Одним из секундомеров засечь время срабатывания биметалли-
ческого реле, ориентируясь по вольтметру.
− Одновременно, следя за вторым секундомером и показаниями
амперметра, через каждые 10 секунд записывать величину пускового то-
ка до тех пор, пока не установится постоянный рабочий ток. В то же
время, необходимо следить и за совпадением индекса-горизонта на сфе-
рической шкале с силуэтом самолетика.
Примечание: Авиагоризонт считается готовым к работе, когда ротор
гироскопа достиг номинальной скорости вращения, индекс ʺгоризонтʺ
совместился с силуэтом самолетика и разомкнулись контакты блокиро-
вочного биметаллического реле выключателя поперечной коррекции.
Неточный выход индексов в нулевое положение характеризует погреш-
ность авиагоризонта.
4. Определить углы крена, при которых происходит отключение по-
перечной коррекции. Для этого:
− Разворачивая авиагоризонт на кронштейне по углу крена вправо, по
вольтметру определить момент отключения коррекции.
− Повторить предыдущий эксперимент, поворачивая прибор по углу
крена влево.
6 Содержание отчета
В отчете должны быть представлены: график изменения пускового тока ги-
ромотора; время разгона гироскопа и время арретирования; скорость продоль-
ной и поперечной коррекции; характеристики точности измерения крена и тан-
гажа, статическая характеристика измерения крена или тангажа, кинематиче-
ская схема гиродатчика.
7 Контрольные вопросы
1. Чем отличается авиагоризонт АГД-1 от авиагоризонта типа АГИ-1?
2. Каким образом и зачем выключается поперечная коррекция авиагори-
зонта?
3. В каком случае загорается сигнальная лампа в указателе?
4. Как происходит арретирование прибора?
5. Как осуществляется отключение продольной коррекции при ускорении и
торможении самолета?
6. Для чего имеется два рабочих положения следящей рамы относительно
оси ротора гироскопа?
7. Как работает чувствительный элемент системы коррекции АГД-1?
8. От чего зависит время готовности прибора к работе?
77
8 Литература
1. Фридлендер Т.О., Козлов И.С. Авиационные гироскопические приборы. -
М.; Оборонгиз. 1961. - 368 с.
2. Одинцов А.А. Теория и расчет гироскопических приборов. - Киев:Вища шк.,
1985. - 392 с.
78